蓝牙遥控小车设计(三)——Amarino和 Android手机重力感应控制
最近事真是多啊,一件接着一件的,加上自己拖延症~ - -!
遥控小车基本完成了,只是自己没时间来更新。
现在更新手机控制的部分
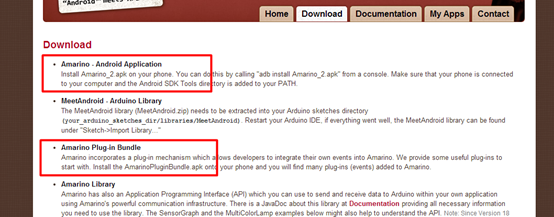
首先我们要熟悉一个软件——
官网地址:http://www.amarino-toolkit.net/
把下面两个下到手机上 安装
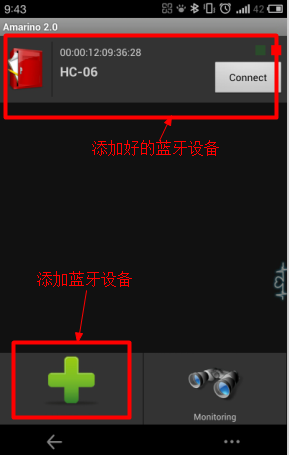
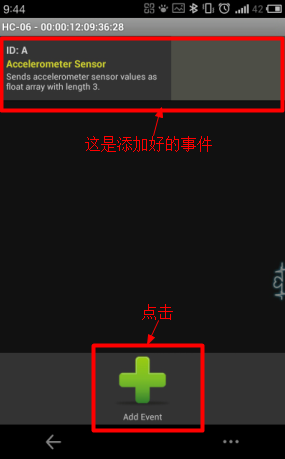
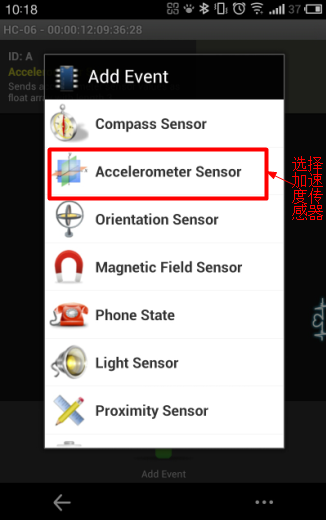
打开软件:
点击Monitoring
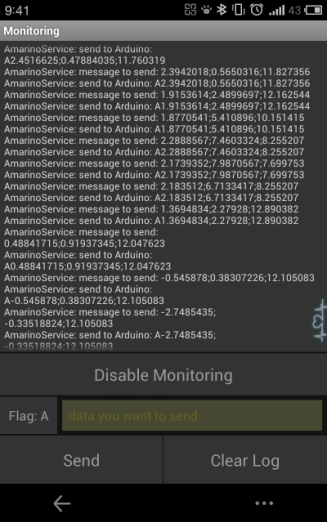
可以发送字符 跟上一篇PC端用串口工具发送一样的效果。
长按蓝牙设备
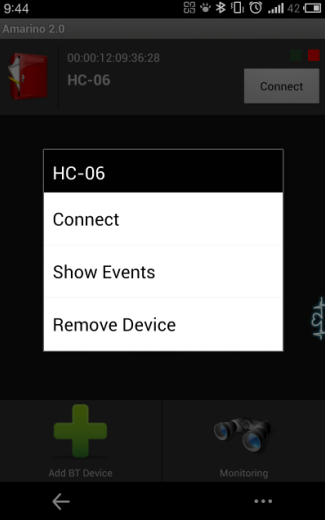
选择show events,
这是加速度传感器发送给arduino的数据
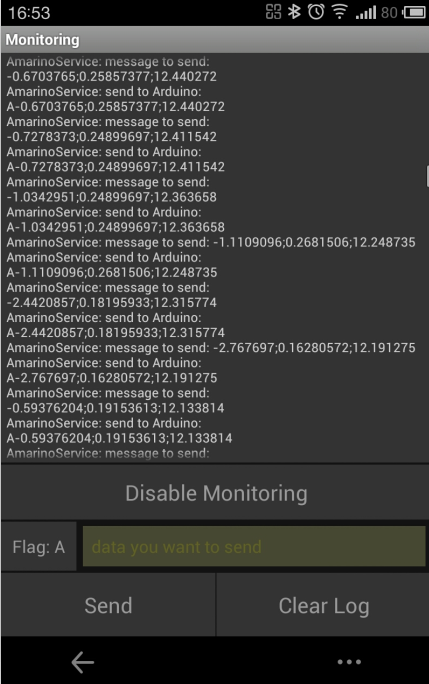
利用这些数据 我们就可以得到手机当前的状态,从而我们可以根据手机的姿态控制小车的前进后退左转右转
贴出来以下代码,供大家参考 这是没有加入PWM调速的 只要有姿态变化都是全速的
/*
Name:liu_l
Date:04.03
ID:A AmarinoService:send to Arduino:A-0.31603462;0.49799395;12.421119 enter:0x0d 都是8位数字
*/
char accelBuff[]; //定义接收数组用来存放手机发送的加速度传感器参数
int accelDot[]; //存放数据中的小数点位于accelBuff中的位置,小数点的十六进制为2e
int accelSemi; //存放数据中的分号位于accelBuff中的位置,分号的十六进制为3b int i; void setup()
{
Serial.begin();
pinMode(, OUTPUT); //M1
pinMode(, OUTPUT); //E1
pinMode(, OUTPUT); //E2
pinMode(, OUTPUT); //M2
} void loop()
{
//接收数据
if(Serial.available())
{
accelBuff[] = Serial.read(); //read
//amarino发送的数据包含一个标志A
if(accelBuff[] == 'A')
{
//开始接收数据,数据以0x13结束
i=;
while()
{
if(Serial.available())
{
accelBuff[i] = Serial.read(); //read
if(accelBuff[i] == 0x13)
break;
else
i++;
}
}
//一直接收数据,直到接收数据结束
} //获取接收数据中分号的位置
for(i = ; i < ; i++)
{
if(accelBuff[i] == 0x3b)
{
accelSemi= i;
break;
}
} //获取接收数据中小数点的位置
for(i = ;i < ;i++)
{
if(accelBuff[i] == 0x2e) //小数点
{
accelDot[]= i; //小数点位置
break;
}
} for(i = accelSemi;i < ;i++) //从第一个分号位置开始,去找第二个小数点位置
{
if(accelBuff[i] == 0x2e)
{
accelDot[]= i;
break;
}
} ////////////////////////////////
//根据接收到的数据控制小车的运动
//////////////////////////////// //首先让小车停止
digitalWrite(, HIGH);
digitalWrite(, HIGH);
digitalWrite(, HIGH);
digitalWrite(, HIGH);
Serial.println("STOP"); //通过X轴数据的正负判端前进还是后退 当数据为十位数的时候才行动
if(accelBuff[] == '-') //手机前倾 小车向前走 A-0.31603462;0.49799395;12.421119
{
if(accelDot[] == || (accelBuff[]-0X30) > ) //A-12.3 小数点在第四位(说明X参数为两位整数) 或者 数据第一位本身大于1(0的acsii码为0x30)
{
Serial.println("forward");
digitalWrite(, HIGH);
digitalWrite(, LOW);
digitalWrite(, HIGH);
digitalWrite(, LOW);
}
}
else
{
if(accelDot[] == || (accelBuff[]-0X30) > )
{
Serial.println("back");
digitalWrite(, LOW);
digitalWrite(, HIGH);
digitalWrite(, LOW);
digitalWrite(, HIGH);
}
} //通过Y轴数据的正负判断左转还是右转
///////////////////////////////////////////////////// A-0.31603462;0.49799395;12.421119
if(accelBuff[accelSemi+] == '-') // ;-23.5
{
if(accelDot[] == accelSemi+ || (accelBuff[accelSemi+]-0X30) > ) //如果 第二个小数点的位置等于=第一个分号+4,如上面假设的-23.5 或者是Y加速度值的第一位本身就大于1
{
Serial.println("left");
digitalWrite(, HIGH);
digitalWrite(, LOW);
digitalWrite(, HIGH);
digitalWrite(, HIGH);
}
}
else
{
if(accelDot[] == accelSemi+ || (accelBuff[accelSemi+]-0X30) > )
{ Serial.println("right");
digitalWrite(, HIGH);
digitalWrite(, HIGH);
digitalWrite(, HIGH);
digitalWrite(, LOW);
}
}
}
}
蓝牙遥控小车设计(三)——Amarino和 Android手机重力感应控制的更多相关文章
- 蓝牙遥控小车设计(四)——Android APP遥控
最近都没心情写博客,忙着答辩论文之类的,唉,主要是愁工作啊...... 先上车体全景图: APP截图: 上最终视频:
- Arduino入门笔记(9):蓝牙模块及第一辆蓝牙遥控小车
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 一.本次实验所需器材 1.Arduino UNO板 https://item.t ...
- 单片机与android手机通信(控制LED小灯亮灭)
1.单片机实验板功能设计 为验证数据通信内容,让单片机板上的四个按键与android手机客户端上的四个LED灯相互控制:为达到上述基本实验要求,采用单字符传输数据即可,硬件需设计两块相同的单片机电路板 ...
- android 利用重力感应监听 来电时翻转手机后静音。
在CallNotifier.java中 加入如下代码: public void GetSensorManager(Context context) { sm = (SensorManager) ...
- Unity3D学习笔记——Android重力感应控制小球
一:准备资源 两张贴图:地图和小球贴图. 二:导入资源 在Assets下建立resources文件夹,然后将贴图导入. 三:建立场景游戏对象 1.建立灯光: 2.创建一个相机,配置默认. 3.建立一个 ...
- Android手机音量的控制
1.AudioManager audio=(AudioManager) super.getSystemService(Context.AUDIO_SERVICE);//获得手机的声音服务 //设置加音 ...
- android小游戏模版—重力感应
好久没更新博客了,今天来谈谈android小游戏---重力感应,一般在游戏里运用的比較多,比方这类游戏有:神庙逃亡.极品飞车,平衡球.三围重力迷宫,重力赛车等. 首先什么是重力感 ...
- Fiddler抓取Android手机网络数据包
也许你也有疑问,如果开发没有完备的接口文档,我如何知道他API的信息? 这时我们就得通过一些抓包工具抓取这些API信息. 常见抓包工具 HTTP抓包工具:Fiddler.Charles.Firebug ...
- Android互动设计-蓝牙遥控自走车iTank
一.让Android与外部的设备互动 iTank智能型移动平台基本款简介 iTank智能型移动平台是一台履带车,车体上方的控制板有一颗微处理器,我们可以通过它的UART或是I2C接口下达指令来控制iT ...
随机推荐
- web颜色转换为delphi
今天在写写一个日志浏览和报警功能时,要求用多种颜色去显示不同的信息,客户给出的颜色是web的 rgb颜色,就是用6位16进制数去表示的颜色,直接把他赋值给Delphi的TColor变量,发现显示的颜色 ...
- something about Parameter Estimation (参数估计)
点估计 Point Estimation 最大似然估计(Maximum Likelihood Estimate —— MLE):视θ为固定的参数,假设存在一个最佳的参数(或参数的真实值是存在的),目的 ...
- IPVS和Nginx两种WRR负载均衡算法详解
动机 五一临近,四月也接近尾声,五一节乃小长假的最后一天.今天是最后一天工作日,竟然感冒了,半夜里翻来覆去无法安睡,加上窗外大飞机屋里小飞机(也就是蚊子)的骚扰,实在是必须起来做点有意义的事了! ...
- Hello to the cruel world
- 通过设置nginx的client_max_body_size解决nginx+php上传大文件的问题
通过设置nginx的client_max_body_size解决nginx+php上传大文件的问题:用nginx来做webserver的时,上传大文件时需要特别注意client_max_body_si ...
- 二进制转16进制JAVA代码
public class Binary2Hex { public static void main(String[] args) { String bString ="10101000&qu ...
- WITH AS 使用
WITH AS 含义: WITH AS短语,也叫做子查询部分(subquery factoring),可以让你做很多事情,定义一个SQL片断,该SQL片断会被整个SQL语句所用到.有的时候,是为了让S ...
- ios上传图片显示方向错误问题
IOS 上传图片方向显示错误问题 问题描述 在使用苹果手机上传图片的时候,发现传完的图片显示出来方向是错误的,竖着的图片会变成横着显示(少部分安卓手机也存在这个问题) 产生原因 ios 相机加入了方向 ...
- JS模块化工具requirejs教程02
基本API require会定义三个变量:define,require,requirejs,其中require === requirejs,一般使用require更简短 define 从名字就可以看出 ...
- hadoop之shuffle详解
Shuffle描述着数据从map task输出到reduce task输入的这段过程. 如map 端的细节图,Shuffle在reduce端的过程也能用图上标明的三点来概括.当前reduce copy ...