ROS naviagtion analysis: costmap_2d--Layer
博客转载自:https://blog.csdn.net/u013158492/article/details/50493113
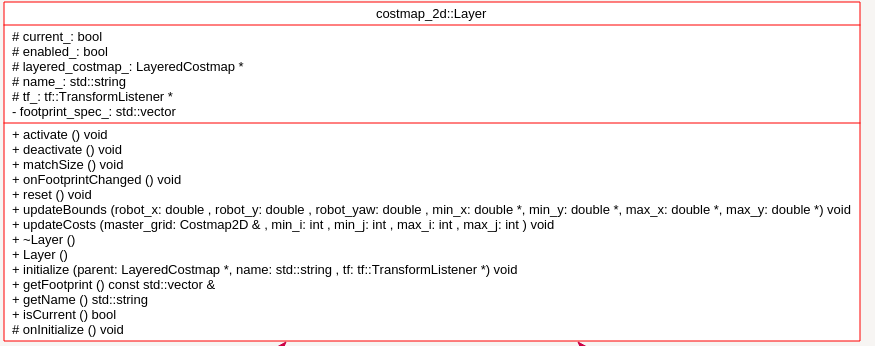
这个类中有一个LayeredCostmap* layered_costmap_数据成员,这个数据成员很重要,因为这个类就是通过这个指针获取到的对master map的操作。没有这个指针,所有基于Layer继承下去的地图的类,都无法操作master map。 这个类基本上没有什么实质性的操作,主要是提供了统一的接口,要求子类必须实现这些方法。这样plugin使用的时候,就可以不用管具体是什么类型的map,反正都有同样的方法名。
以下是这个类实现的两个方法,其他的方法基本上都是virtual ,要求子类实现。
void Layer::initialize(LayeredCostmap* parent, std::string name, tf::TransformListener *tf)
{
layered_costmap_ = parent;
name_ = name;
tf_ = tf;
onInitialize();
} const std::vector<geometry_msgs::Point>& Layer::getFootprint() const
{
return layered_costmap_->getFootprint();
}
重要的几个virtual方法:
virtual void updateBounds(double robot_x, double robot_y, double robot_yaw, double* min_x, double* min_y,
double* max_x, double* max_y) {} /**
* @brief Actually update the underlying costmap, only within the bounds
* calculated during UpdateBounds().
*/
virtual void updateCosts(Costmap2D& master_grid, int min_i, int min_j, int max_i, int max_j) {} /** @brief Stop publishers. */
virtual void deactivate() {} /** @brief Restart publishers if they've been stopped. */
virtual void activate() {} virtual void reset() {}
这个类就这么多内容,接下来进入真正干活的几个类分析:
ObstacleLayer
InflationLayer
StaticLayer
VoxelLayer
ROS naviagtion analysis: costmap_2d--Layer的更多相关文章
- ROS naviagtion analysis: costmap_2d--Costmap2DROS
博客转载自:https://blog.csdn.net/u013158492/article/details/50485418 在上一篇文章中moveBase就有关于costmap_2d的使用: pl ...
- ROS naviagtion analysis: move_base
博客转载自:https://blog.csdn.net/u013158492/article/details/50483123 这是navigation的第一篇文章,主要通过分析ROS代码级实现,了解 ...
- ROS naviagtion analysis: costmap_2d--ObstacleLayer
博客转载自:https://blog.csdn.net/u013158492/article/details/50493676 构造函数 ObstacleLayer() { costmap_ = NU ...
- ROS naviagtion analysis: costmap_2d--StaticLayer
博客转载自:https://blog.csdn.net/u013158492/article/details/50493246 从UML中能够看到,StaticLayer主要是在实现Layer层要求实 ...
- ROS naviagtion analysis: costmap_2d--LayeredCostmap
博客转自:https://blog.csdn.net/u013158492/article/details/50490490 在数据成员中,有两个重要的变量:Costmap2D costmap_和 s ...
- ROS naviagtion analysis: costmap_2d--CostmapLayer
博客转自:https://blog.csdn.net/u013158492/article/details/50493220 这个类是为ObstacleLayer StaticLayer voxelL ...
- ROS naviagtion analysis: costmap_2d--Costmap2D
博客转载自:https://blog.csdn.net/u013158492/article/details/50492506 Costmap2D是存储地图数据的父类.真正的地图数据就存储在数据成员u ...
- ROS 教程之 navigation :在 catkin 环境下创建costmap layer plugin
在做机器人导航的时候,肯定见到过global_costmap和local_costmap.global_costmap是为了全局路径规划服务的,如从这个房间到那个房间该怎么走.local_costma ...
- ROS探索总结(十三)——导航与定位框架
导航与定位是机器人研究中的重要部分. 一般机器人在陌生的环境下需要使用激光传感器(或者深度传感器转换成激光数据),先进行地图建模,然后在根据建立的地图进行导航.定位.在ROS中也有很多 ...
随机推荐
- Python错误TypeError: write() argument must be str, not bytes
2016-07-03 20:51:25 今天使用Python中的pickle存储的时候出现了以下错误: TypeError: write() argument must be str, not byt ...
- BZOJ5337 [TJOI2018]str
题意 小豆参加了生物实验室.在实验室里,他主要研究蛋臼质.他现在研究的蛋臼质是由k个氨基酸按一定顺序构成的.每一个氨基酸都可能有a种碱基序 列si_j 构成.现在小豆有一个碱基串s,小豆想知道在这个碱 ...
- 一般在cmd中报不是合法的命令啥的,都是环境变量没有配置好
在配置cnpm的时候一定要将环境变量先配置好,配置如下: C:\Program Files\nodejs; C:\Program Files\nodejs\node_global; C:\Progra ...
- ArcGIS_Desktop安装步骤
1.双击镜像文件 2.下一步 3.关闭 4.下一步 5.下一步 6.下一步 7.下一步 8.下一步 9.安装 10.一直到下一步安装完成
- 不让activity显示UI的办法
直接把 //setContentView(R.layout.activity_welcome); 注释掉就是了
- Docker Toolbox on Windows 7
1,下载DockerToolbox,可选daocloud或官网下载 https://get.daocloud.io/toolbox/ 2,配置虚拟机路径环境变量,避免系统C盘,很占空间 MACHINE ...
- 南阳OJ 61 传纸条(一)
传纸条(一) 时间限制:2000 ms | 内存限制:65535 KB 难度:5 描述 小渊和小轩是好朋友也是同班同学,他们在一起总有谈不完的话题.一次素质拓展活动中,班上同学安排做成一个m行 ...
- 【转】Apache JMeter web性能测试实例
Apache JMeter是可以对利用HTTP或FTP服务器的应用程序进行测试的工具.它是基于Java的,通过所提供的API它还具有高度可扩展性.典型的JMeter测试包括创建循环和线程组.循环使用预 ...
- 【转】Jmeter + DadBoby 安装使用
一直接触LR比较多,这阵子突然想了解一下开源的性能测试工具,无意中接触到了Jmeter+Badboy,这两款工具对于想进行性能测试,但又对LR高额的商业费用望而止步的小公司可谓是再适合不过了. 自已小 ...
- 微信小程序生成太阳码
微信小程序生成太阳码 https://api.weixin.qq.com/wxa/getwxacodeunlimit?access_token=access_token 必须通过POST提交 而且参数 ...