ROS naviagtion analysis: costmap_2d--CostmapLayer
博客转自:https://blog.csdn.net/u013158492/article/details/50493220
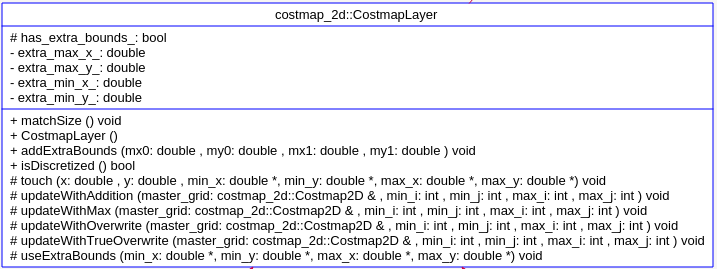
这个类是为ObstacleLayer StaticLayer voxelLayer 这种维护了自己所在层的地图数据的类,提供了一些公共的操作方法。
从UML中可以看到,这个类提供了以下方法,这些方法的参数列表均为(costmap_2d::Costmap2D& master_grid, int min_i, int min_j, int max_i, int max_j)
updateWithTrueOverwrite
updateWithOverwrite
updateWithMax
updateWithAddition
这些成员函数都是为本层的地图,如何更新数据到master map上的一些更新方法。这里调一个例子说明:
void CostmapLayer::updateWithOverwrite(costmap_2d::Costmap2D& master_grid, int min_i, int min_j, int max_i, int max_j)
{
if (!enabled_)
return;
unsigned char* master = master_grid.getCharMap();
unsigned int span = master_grid.getSizeInCellsX(); for (int j = min_j; j < max_j; j++)
{
unsigned int it = span*j+min_i;
for (int i = min_i; i < max_i; i++)
{
if (costmap_[it] != NO_INFORMATION)
master[it] = costmap_[it];//这里就是overwrite的涵义,costmap_是本层的地图数据。直接将本层的数据赋值给master map的对应索引就行了
it++;
}
}
}
另外还有两个函数成员:
void CostmapLayer::touch(double x, double y, double* min_x, double* min_y, double* max_x, double* max_y)
{
*min_x = std::min(x, *min_x);
*min_y = std::min(y, *min_y);
*max_x = std::max(x, *max_x);
*max_y = std::max(y, *max_y);
} void CostmapLayer::matchSize()
{
Costmap2D* master = layered_costmap_->getCostmap();//这是由Layer 继承过来的,Layer的指针LayeredCostmap* layered_costmap_
resizeMap(master->getSizeInCellsX(), master->getSizeInCellsY(), master->getResolution(),master->getOriginX(), master->getOriginY());//这里调整的对象是继承的Costmap2D的数据成员char* costmap_, 也就是这里的调整是针对各层的地图,不是关于master map的。
}
ROS naviagtion analysis: costmap_2d--CostmapLayer的更多相关文章
- ROS naviagtion analysis: costmap_2d--Costmap2DROS
博客转载自:https://blog.csdn.net/u013158492/article/details/50485418 在上一篇文章中moveBase就有关于costmap_2d的使用: pl ...
- ROS naviagtion analysis: move_base
博客转载自:https://blog.csdn.net/u013158492/article/details/50483123 这是navigation的第一篇文章,主要通过分析ROS代码级实现,了解 ...
- ROS naviagtion analysis: costmap_2d--ObstacleLayer
博客转载自:https://blog.csdn.net/u013158492/article/details/50493676 构造函数 ObstacleLayer() { costmap_ = NU ...
- ROS naviagtion analysis: costmap_2d--LayeredCostmap
博客转自:https://blog.csdn.net/u013158492/article/details/50490490 在数据成员中,有两个重要的变量:Costmap2D costmap_和 s ...
- ROS naviagtion analysis: costmap_2d--StaticLayer
博客转载自:https://blog.csdn.net/u013158492/article/details/50493246 从UML中能够看到,StaticLayer主要是在实现Layer层要求实 ...
- ROS naviagtion analysis: costmap_2d--Layer
博客转载自:https://blog.csdn.net/u013158492/article/details/50493113 这个类中有一个LayeredCostmap* layered_costm ...
- ROS naviagtion analysis: costmap_2d--Costmap2D
博客转载自:https://blog.csdn.net/u013158492/article/details/50492506 Costmap2D是存储地图数据的父类.真正的地图数据就存储在数据成员u ...
- ROS探索总结(十三)——导航与定位框架
导航与定位是机器人研究中的重要部分. 一般机器人在陌生的环境下需要使用激光传感器(或者深度传感器转换成激光数据),先进行地图建模,然后在根据建立的地图进行导航.定位.在ROS中也有很多 ...
- ROS 教程之 navigation :在 catkin 环境下创建costmap layer plugin
在做机器人导航的时候,肯定见到过global_costmap和local_costmap.global_costmap是为了全局路径规划服务的,如从这个房间到那个房间该怎么走.local_costma ...
随机推荐
- 为什么要使用ORM技术?和 JDBC 有何不一样?
为什么要使用ORM技术?和 JDBC 有何不一样? 1.繁琐的代码问题: 用JDBC的API编程访问数据库,代码量较大,特别是访问字段较多的表的时候,代码显得繁琐.累赘,容 ...
- Winform、WPF、Silverlight、MFC区别与联系
WinForm 在Windows中,诸如窗体绘制等功能由GDI(图形设备接口)实现,放在操作系统内核中.Windows Forms在底层使用的是GDI+.GDI+是GDI的“面向对象包装”,使用C++ ...
- hexo搭建个人主页托管于github
之前学习了 如何利用Github免费搭建个人主页,今天利用hexo来快速生成个人网页托管于github上. hexo系列教程:(一)hexo介绍 什么是hexo hexo是一个基于Node.js的静态 ...
- 系列文章--SharePoint 2013 Designer 入门教程
SharePoint的使用中,SharePoint Designer是非常重要的工具,我们可以通过Designer设计页面.母版页,维护.管理站点,也可以定制列表表单.数据视图,设计工作流等等.下面总 ...
- 避免Android内存泄露
摘自:http://blog.csdn.net/xyz_lmn/article/details/7108011 Android的应用被限制为最多占用16m的内存,至少在T-Mobile G1上是这样的 ...
- 织梦 dede 笔记
将项目转移到另一服务器 方法: https://www.genban.org/news/dedecms-13096.html 在实际中,我走的是第二种方法 方法一: 1 后台>系统>备份 ...
- composer.phar的作用和安装laravel5.5.4 和 vendor目录
composer.phar有什么作用 是 PHP 用来管理依赖(dependency)关系的工具.你可以在自己的项目中声明所依赖的外部工具库(libraries),Composer 会帮你安装这些依赖 ...
- mysql实战优化之四:mysql索引优化
0. 使用SQL提示 用户可以使用use index.ignore index.force index等SQL提示来进行选择SQL的执行计划. 1.支持多种过滤条件 2.避免多个范围条件 应尽量避免在 ...
- 开启vmotion,实现虚拟机可以在线迁移的选项
先决条件: 1.vcenter5.5 2.vmotion服务开启 3.分布式交换机已经部署完毕 4.虚拟机在线迁移必须在web管理下,在vclient不可以
- python开发进程:共享数据&进程池
一,共享数据 展望未来,基于消息传递的并发编程是大势所趋 即便是使用线程,推荐做法也是将程序设计为大量独立的线程集合 通过消息队列交换数据.这样极大地减少了对使用锁定和其他同步手段的需求, 还可以扩展 ...