ROS naviagtion analysis: costmap_2d--Layer
博客转载自:https://blog.csdn.net/u013158492/article/details/50493113
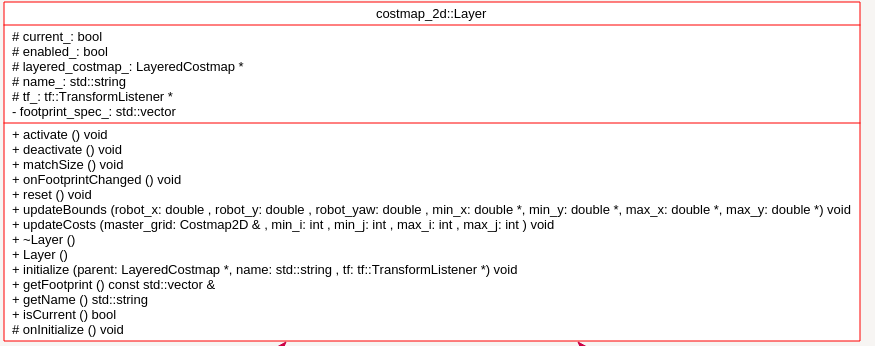
这个类中有一个LayeredCostmap* layered_costmap_数据成员,这个数据成员很重要,因为这个类就是通过这个指针获取到的对master map的操作。没有这个指针,所有基于Layer继承下去的地图的类,都无法操作master map。 这个类基本上没有什么实质性的操作,主要是提供了统一的接口,要求子类必须实现这些方法。这样plugin使用的时候,就可以不用管具体是什么类型的map,反正都有同样的方法名。
以下是这个类实现的两个方法,其他的方法基本上都是virtual ,要求子类实现。
void Layer::initialize(LayeredCostmap* parent, std::string name, tf::TransformListener *tf)
{
layered_costmap_ = parent;
name_ = name;
tf_ = tf;
onInitialize();
} const std::vector<geometry_msgs::Point>& Layer::getFootprint() const
{
return layered_costmap_->getFootprint();
}
重要的几个virtual方法:
virtual void updateBounds(double robot_x, double robot_y, double robot_yaw, double* min_x, double* min_y,
double* max_x, double* max_y) {} /**
* @brief Actually update the underlying costmap, only within the bounds
* calculated during UpdateBounds().
*/
virtual void updateCosts(Costmap2D& master_grid, int min_i, int min_j, int max_i, int max_j) {} /** @brief Stop publishers. */
virtual void deactivate() {} /** @brief Restart publishers if they've been stopped. */
virtual void activate() {} virtual void reset() {}
这个类就这么多内容,接下来进入真正干活的几个类分析:
ObstacleLayer
InflationLayer
StaticLayer
VoxelLayer
ROS naviagtion analysis: costmap_2d--Layer的更多相关文章
- ROS naviagtion analysis: costmap_2d--Costmap2DROS
博客转载自:https://blog.csdn.net/u013158492/article/details/50485418 在上一篇文章中moveBase就有关于costmap_2d的使用: pl ...
- ROS naviagtion analysis: move_base
博客转载自:https://blog.csdn.net/u013158492/article/details/50483123 这是navigation的第一篇文章,主要通过分析ROS代码级实现,了解 ...
- ROS naviagtion analysis: costmap_2d--ObstacleLayer
博客转载自:https://blog.csdn.net/u013158492/article/details/50493676 构造函数 ObstacleLayer() { costmap_ = NU ...
- ROS naviagtion analysis: costmap_2d--StaticLayer
博客转载自:https://blog.csdn.net/u013158492/article/details/50493246 从UML中能够看到,StaticLayer主要是在实现Layer层要求实 ...
- ROS naviagtion analysis: costmap_2d--LayeredCostmap
博客转自:https://blog.csdn.net/u013158492/article/details/50490490 在数据成员中,有两个重要的变量:Costmap2D costmap_和 s ...
- ROS naviagtion analysis: costmap_2d--CostmapLayer
博客转自:https://blog.csdn.net/u013158492/article/details/50493220 这个类是为ObstacleLayer StaticLayer voxelL ...
- ROS naviagtion analysis: costmap_2d--Costmap2D
博客转载自:https://blog.csdn.net/u013158492/article/details/50492506 Costmap2D是存储地图数据的父类.真正的地图数据就存储在数据成员u ...
- ROS 教程之 navigation :在 catkin 环境下创建costmap layer plugin
在做机器人导航的时候,肯定见到过global_costmap和local_costmap.global_costmap是为了全局路径规划服务的,如从这个房间到那个房间该怎么走.local_costma ...
- ROS探索总结(十三)——导航与定位框架
导航与定位是机器人研究中的重要部分. 一般机器人在陌生的环境下需要使用激光传感器(或者深度传感器转换成激光数据),先进行地图建模,然后在根据建立的地图进行导航.定位.在ROS中也有很多 ...
随机推荐
- typedeifn typename
1.类型说明typedef 类型说明的格式为: typedef 类型 定义名; 类型说明只定义了一个数据类型的新名字而不是定义一种新的数据类型.定义名表示这个类型的新名字. 例如: 用下面语句定义整 ...
- FZU Problem 2129 子序列个数
看了 dp 方程之后应该是妙懂 每次 加入一个数,×2 然后剪掉重复的: 重复的个数 维前面那个数,,,,, #include<iostream> #include<stdio.h ...
- MySql必知必会实战练习(四)主键、外键、sql约束、联结表
本博将对主键.外键.MySql数据库约束和联结表的相关特性进行总结和实战 1. 主键 表中的每一行都应该具有可以唯一标识自己的一列(或一组列),而这个承担标识作用的列称为主键 如果没有主键,数据的管理 ...
- Windows 7 扩展玻璃效果(Aero Glass)
转自:http://www.cnblogs.com/gnielee/archive/2010/10/04/windows7-extend-aero-glass.html Windows 7 操作系统默 ...
- Maven打包同一个jar有不同的:版本+时间戳(解决思路)
在我们的开发过程中,目前流行的版本控制工具maven,在项目开发阶段,大家都是通过发布SNAPSHOT快照版进行相互模块之间的依赖开发, 这个时候就会有一个问题,要是一天构建多次的快照版,会发现在项目 ...
- 笔记:Why don't you pull up a chair and give this lifestyle a try?
Why don't you pull up a chair and give this lifestyle a try? Why don't you pull up a chair and give ...
- 12C 对表分区维护的增强
Oracle Database 12c对表分区变化比较多,共分为下面几点 1.在线移动分区:通过MOVE ONLINE关键字实现在线分区移动.移动过程中,对表和被移动的分区可以执行查询操作, DML语 ...
- (7)Stream简介
流的个人理解: 怎样获得流: 怎样处理流: 中间操作和终端操作介绍: 中间操作和终端操作的使用: 流的个人理解: Stream也就是流,他和IO流不一样,他是java8诞生的东西,我对他的理解就是一个 ...
- shell 正则表达式与文件名匹配
1) . : 匹配任意单ASCII 字符,可以为字母,或为数字. 2) 举例: ..XC..匹配deXC1t.23XCdf 等,.w..w..w.匹配rwxrw-rw- 行首以^匹配字符串或字符序列 ...
- PHP中的精确计算bcadd,bcsub,bcmul,bcdiv
引言:一定要确保数据的准确性.这是一个好的程序员的基本素养. <?php /** * 精确加法 * @param [type] $a [description] * @param [type] ...