使用OpenCV/python进行双目测距
在做SLAM时,希望用到深度图来辅助生成场景,所以要构建立体视觉,在这里使用OpenCV的Stereo库和python来进行双目立体视觉的图像处理。
- 立体标定
- 应用标定数据
- 转换成深度图
标定
在开始之前,需要准备的当然是两个摄相头,根据你的需求将两个摄像头进行相对位置的固定,我是按平行来进行固定的(如果为了追求两个双目图像更高的生命度,也可以将其按一定钝角固定,这样做又限制了场景深度的扩展,根据实际需求选择)

由于摄像头目前是我们手动进行定位的,我们现在还不知道两张图像与世界坐标之间的耦合关系,所以下一步要进行的是标定,用来确定分别获取两个摄像头的内部参数,并且根据两个摄像头在同一个世界坐标下的标定参数来获取立体参数。注:不要使用OpenCV自带的自动calbration,其对棋盘的识别率极低,使用Matlab的Camera Calibration Toolbox更为有效,具体细节请看:摄像机标定和立体标定
同时从两个摄像头获取图片
import cv2
import time
AUTO = True # 自动拍照,或手动按s键拍照
INTERVAL = 2 # 自动拍照间隔
cv2.namedWindow("left")
cv2.namedWindow("right")
cv2.moveWindow("left", 0, 0)
cv2.moveWindow("right", 400, 0)
left_camera = cv2.VideoCapture(0)
right_camera = cv2.VideoCapture(1)
counter = 0
utc = time.time()
pattern = (12, 8) # 棋盘格尺寸
folder = "./snapshot/" # 拍照文件目录
def shot(pos, frame):
global counter
path = folder + pos + "_" + str(counter) + ".jpg"
cv2.imwrite(path, frame)
print("snapshot saved into: " + path)
while True:
ret, left_frame = left_camera.read()
ret, right_frame = right_camera.read()
cv2.imshow("left", left_frame)
cv2.imshow("right", right_frame)
now = time.time()
if AUTO and now - utc >= INTERVAL:
shot("left", left_frame)
shot("right", right_frame)
counter += 1
utc = now
key = cv2.waitKey(1)
if key == ord("q"):
break
elif key == ord("s"):
shot("left", left_frame)
shot("right", right_frame)
counter += 1
left_camera.release()
right_camera.release()
cv2.destroyWindow("left")
cv2.destroyWindow("right")
下面是我拍摄的样本之一,可以肉眼看出来这两个摄像头成像都不是水平的,这更是需要标定的存在的意义

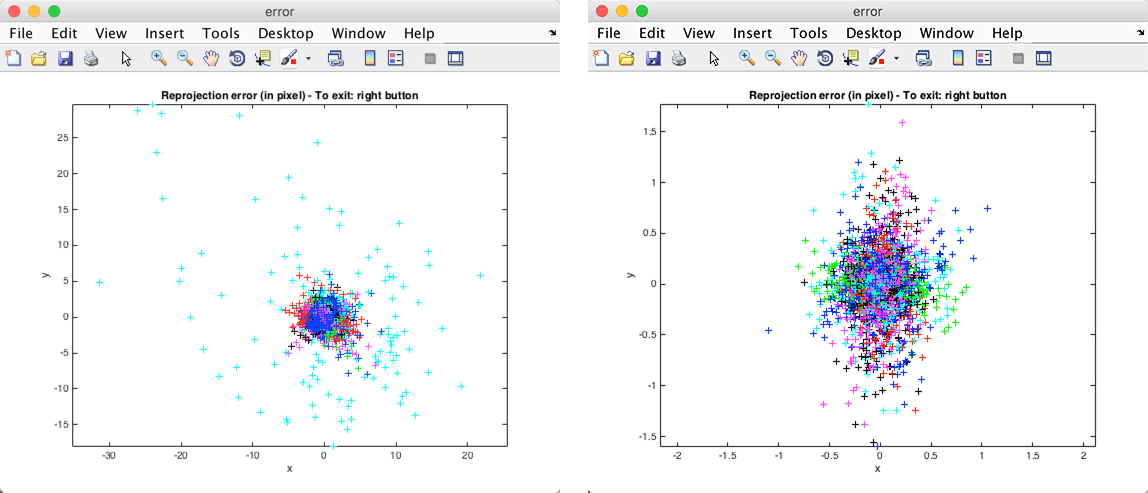
在进行标定的过程中,要注意的是在上面标定方法中没有提到的是,单个标定后,要对标定的数据进行错误分析(Analyse Error),如左图,是我对左摄像头的标定结果分析。图中天蓝色点明显与大部分点不聚敛,所以有可能是标定时对这个图片标定出现的错误,要重新标定,在该点上点击并获取其图片名称索引,对其重新标定后,右图的结果看起来还是比较满意的
在进行完立体标定后,我们将得到如下的数据:
Stereo calibration parameters after optimization:
Intrinsic parameters of left camera:
Focal Length: fc_left = [ 824.93564 825.93598 ] [ 8.21112 8.53492 ]
Principal point: cc_left = [ 251.64723 286.58058 ] [ 13.92642 9.11583 ]
Skew: alpha_c_left = [ 0.00000 ] [ 0.00000 ] => angle of pixel axes = 90.00000 0.00000 degrees
Distortion: kc_left = [ 0.23233 -0.99375 0.00160 0.00145 0.00000 ] [ 0.05659 0.30408 0.00472 0.00925 0.00000 ]
Intrinsic parameters of right camera:
Focal Length: fc_right = [ 853.66485 852.95574 ] [ 8.76773 9.19051 ]
Principal point: cc_right = [ 217.00856 269.37140 ] [ 10.40940 9.47786 ]
Skew: alpha_c_right = [ 0.00000 ] [ 0.00000 ] => angle of pixel axes = 90.00000 0.00000 degrees
Distortion: kc_right = [ 0.30829 -1.61541 0.01495 -0.00758 0.00000 ] [ 0.06567 0.55294 0.00547 0.00641 0.00000 ]
Extrinsic parameters (position of right camera wrt left camera):
Rotation vector: om = [ 0.01911 0.03125 -0.00960 ] [ 0.01261 0.01739 0.00112 ]
Translation vector: T = [ -70.59612 -2.60704 18.87635 ] [ 0.95533 0.79030 5.25024 ]
应用标定数据
我们使用如下的代码来将其配置到python中,上面的参数都是手动填写至下面的内容中的,这样免去保存成文件再去读取,在托运填写的时候要注意数据的对应位置。
# filename: camera_configs.py
import cv2
import numpy as np
left_camera_matrix = np.array([[824.93564, 0., 251.64723],
[0., 825.93598, 286.58058],
[0., 0., 1.]])
left_distortion = np.array([[0.23233, -0.99375, 0.00160, 0.00145, 0.00000]])
right_camera_matrix = np.array([[853.66485, 0., 217.00856],
[0., 852.95574, 269.37140],
[0., 0., 1.]])
right_distortion = np.array([[0.30829, -1.61541, 0.01495, -0.00758, 0.00000]])
om = np.array([0.01911, 0.03125, -0.00960]) # 旋转关系向量
R = cv2.Rodrigues(om)[0] # 使用Rodrigues变换将om变换为R
T = np.array([-70.59612, -2.60704, 18.87635]) # 平移关系向量
size = (640, 480) # 图像尺寸
# 进行立体更正
R1, R2, P1, P2, Q, validPixROI1, validPixROI2 = cv2.stereoRectify(left_camera_matrix, left_distortion,
right_camera_matrix, right_distortion, size, R,
T)
# 计算更正map
left_map1, left_map2 = cv2.initUndistortRectifyMap(left_camera_matrix, left_distortion, R1, P1, size, cv2.CV_16SC2)
right_map1, right_map2 = cv2.initUndistortRectifyMap(right_camera_matrix, right_distortion, R2, P2, size, cv2.CV_16SC2)
这样,我们得到了左右摄像头的两个map,并得到了立体的Q,这些参数都将应用于下面的转换成深度图中
转换成深度图
import numpy as np
import cv2
import camera_configs
cv2.namedWindow("left")
cv2.namedWindow("right")
cv2.namedWindow("depth")
cv2.moveWindow("left", 0, 0)
cv2.moveWindow("right", 600, 0)
cv2.createTrackbar("num", "depth", 0, 10, lambda x: None)
cv2.createTrackbar("blockSize", "depth", 5, 255, lambda x: None)
camera1 = cv2.VideoCapture(0)
camera2 = cv2.VideoCapture(1)
# 添加点击事件,打印当前点的距离
def callbackFunc(e, x, y, f, p):
if e == cv2.EVENT_LBUTTONDOWN:
print threeD[y][x]
cv2.setMouseCallback("depth", callbackFunc, None)
while True:
ret1, frame1 = camera1.read()
ret2, frame2 = camera2.read()
if not ret1 or not ret2:
break
# 根据更正map对图片进行重构
img1_rectified = cv2.remap(frame1, camera_configs.left_map1, camera_configs.left_map2, cv2.INTER_LINEAR)
img2_rectified = cv2.remap(frame2, camera_configs.right_map1, camera_configs.right_map2, cv2.INTER_LINEAR)
# 将图片置为灰度图,为StereoBM作准备
imgL = cv2.cvtColor(img1_rectified, cv2.COLOR_BGR2GRAY)
imgR = cv2.cvtColor(img2_rectified, cv2.COLOR_BGR2GRAY)
# 两个trackbar用来调节不同的参数查看效果
num = cv2.getTrackbarPos("num", "depth")
blockSize = cv2.getTrackbarPos("blockSize", "depth")
if blockSize % 2 == 0:
blockSize += 1
if blockSize < 5:
blockSize = 5
# 根据Block Maching方法生成差异图(opencv里也提供了SGBM/Semi-Global Block Matching算法,有兴趣可以试试)
stereo = cv2.StereoBM_create(numDisparities=16*num, blockSize=blockSize)
disparity = stereo.compute(imgL, imgR)
disp = cv2.normalize(disparity, disparity, alpha=0, beta=255, norm_type=cv2.NORM_MINMAX, dtype=cv2.CV_8U)
# 将图片扩展至3d空间中,其z方向的值则为当前的距离
threeD = cv2.reprojectImageTo3D(disparity.astype(np.float32)/16., camera_configs.Q)
cv2.imshow("left", img1_rectified)
cv2.imshow("right", img2_rectified)
cv2.imshow("depth", disp)
key = cv2.waitKey(1)
if key == ord("q"):
break
elif key == ord("s"):
cv2.imwrite("./snapshot/BM_left.jpg", imgL)
cv2.imwrite("./snapshot/BM_right.jpg", imgR)
cv2.imwrite("./snapshot/BM_depth.jpg", disp)
camera1.release()
camera2.release()
cv2.destroyAllWindows()
下面则是一附成像图,最右侧的为生成的disparity图,按照上面的代码,在图上点击则可以读取到该点的距离

Have fun.
使用OpenCV/python进行双目测距的更多相关文章
- 学习笔记:使用opencv做双目测距(相机标定+立体匹配+测距).
最近在做双目测距,觉得有必要记录点东西,所以我的第一篇博客就这么诞生啦~ 双目测距属于立体视觉这一块,我觉得应该有很多人踩过这个坑了,但网上的资料依旧是云里雾里的,要么是理论讲一大堆,最后发现还不知道 ...
- 学习OpenCV双目测距原理及常见问题解答
学习OpenCV双目测距原理及常见问题解答 转自博客:https://blog.csdn.net/angle_cal/article/details/50800775 一. 整体思路和问题转化. 图 ...
- OpenCV Python教程(3、直方图的计算与显示)
转载请详细注明原作者及出处,谢谢! 本篇文章介绍如何用OpenCV Python来计算直方图,并简略介绍用NumPy和Matplotlib计算和绘制直方图 直方图的背景知识.用途什么的就直接略过去了. ...
- OpenCV + python 实现人脸检测(基于照片和视频进行检测)
OpenCV + python 实现人脸检测(基于照片和视频进行检测) Haar-like 通俗的来讲,就是作为人脸特征即可. Haar特征值反映了图像的灰度变化情况.例如:脸部的一些特征能由矩形特征 ...
- opencv+python视频实时质心显示
利用opencv+python实现以下功能: 1)获取实时视频,分解帧频: 2)将视频做二值化处理: 3) 将视频做滤波处理(去除噪点,获取准确轮廓个数): 4)识别图像轮廓: 5)计算质心: 6)描 ...
- Erlang/Elixir: 使用 OpenCV, Python 搭建图片缩略图服务器
这篇文章是在OSX上测试和运行的的, Ubuntu下的安装和配置请移步到这里 应用程序进程树, 默认 Poolboy 中初始化10个用于处理图片的 Python 工作进程(Worker) 首先安装Op ...
- opencv python实用操作
画多边形 fillConvexPloy与fillConvexPloy的区别 fillConvexPloy 用来画单个凸多边形: 如果点集的连线不是凹多边形,则会找一个最小的凸多边形把该凹多边形包住画出 ...
- Win7 64bit+Anaconda(3-5.0.1,Python3.6)+Pycharm(community-2017.3.3)+OpenCV(python‑3.4.0‑cp36‑cp36m)(转载)
Anaconda(3-5.0.1,Python3.6)下载链接:https://pan.baidu.com/s/1bqFwLMB 密码:37ih Pycharm(community-2017.3.3) ...
- 解决Windows Server 2012 R2 Datacenter云服务器无法运行opencv python程序的问题
写了个基于opencv的python程序,pyinstaller 32位机打包后在win7/win10 32/64正常运行,在Windows Server 2012 R2 Datacenter云服务器 ...
随机推荐
- WPF4.5 中的新增功能和增强功能的信息
本主题包含有关 Windows Presentation Foundation (WPF) 版本 4.5 中的新增功能和增强功能的信息. 本主题包含以下各节: 功能区控件 改善性能,当显示大时设置分组 ...
- MIME对应表
文件后缀与MIME类型的对应表 'ai' => 'application/postscript', 'aif' => 'audio/x-aiff ...
- css3旋转小三角
<!doctype html> <html lang="en"> <head> <meta charset="UTF-8&quo ...
- DBA_Oracle DBA常用表汇总(概念)
2014-06-20 Created By BaoXinjian
- python(22)总结下最近遇到的编码问题
最近爬取,或者解析网页是总是遇到编码问题(我的版本:python2.7) 一.常见异常:UnicodeEncodeError: 'ascii' codec can't encode character ...
- 为什么引用不了App_Code里的类
在Web应用程序中不能通过右键项目-〉”添加“-〉”添加ASP.NET文件夹“方式添加 .因为Web应用程序中App_Code就不存在 .不过可以通过手动的方式创建,添加一个文件夹命名为App_Cod ...
- D触发器
普通的电路,以及常规的逻辑门都有一个共性,那就是输出直接依赖于输入,当输入消失的时候,输入也跟着不存在了.触发器不同,当它触发的时候,输出会发生变化.但是,当输入撤销之后,输出依然能够维持. 这就是说 ...
- JavaScript事件基础知识总结【思维导图】
另外附上来自Nicholas C.Zakas<JavaScript高级程序设计 第3版>中的跨浏览器兼容EventUtil对象. var EventUtil = { //注册事件 addH ...
- YUV422/YUV420播放
YUV播放器,directX,VS2008 MFC完成 CSDN下载 http://download.csdn.net/detail/xjt1988xjt/2386621#comment 默认是播放 ...
- stdlib
system(pause): int cmp(const void *a ,const void *b) { return *(int *)a - *(int *)b ; //从小到 ...