回顾Games101图形学(一)几何变换中一些公式的推导
回顾Games101 chatper1 - 6
前言
本文只写回顾后重新加深认识的知识
透视除法的意义
经过MVP矩阵之后,将模型空间下某点的坐标,转换成了裁剪空间下的坐标,此时因为裁剪空间的范围是x∈[-W/2,W/2]和y∈[-H/2,H/2],所以经过以下两个变换,其中除以pz就是透视除法
一:
\\
-1≤2·\frac{\left( \frac{p_y}{p_z}·near \right)}{h}≤1
\]
二:
x& y& z& w\\
\end{matrix} \right] \left[ \begin{matrix}
1& 0& 0& 0\\
0& 1& 0& 0\\
0& 0& 1& 0\\
\varDelta x& \varDelta y& \varDelta z& 1\\
\end{matrix} \right] =\left[ \begin{matrix}
x+\varDelta x*w& y+\varDelta y*w& z+\varDelta z*w& w\\
\end{matrix} \right]
\]
只有当W=1,这个三维坐标转换是等价的,才能保证位移的量是正确的,W=0时,则没有位移
只有当W=1时,三维坐标点转换成四维齐次坐标点才是等价的
坐标系变换和矩阵推导
坐标系变换理解不直观,倾向于101中闫老师所说的理解坐标系的转换通过矩阵进行的线性变换,将A坐标系下的点P,乘上矩阵得出B坐标系下的点P',以下是抛开常见的变换(如透视投影变换、正交投影变换等)如何得出变换矩阵M,通过矩阵变换(下文着重说明)
已知坐标系A和坐标系B
\]
\]
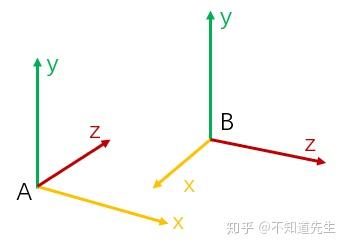
则将坐标系B中一点P从坐标系B变换到坐标系A的变换矩阵为:(注意此处的例子是将源坐标系A变换到目标坐标系B下)
u_{\mathrm{x}}& u_{\mathrm{y}}& u_{\mathrm{z}}& 0\\
v_{\mathrm{x}}& v_{\mathrm{y}}& v_{\mathrm{z}}& 0\\
w_{\mathrm{x}}& w_{\mathrm{y}}& w_{\mathrm{z}}& 0\\
Q_{\mathrm{x}}& Q_{\mathrm{y}}& Q_{\mathrm{z}}& 1\\
\end{matrix} \right]
\]
如之前所说,变换过程中点p在空间中的绝对位置没有发生改变,只是参考坐标系发生了改变,从B坐标系变到A坐标系。(缩放,旋转,平移变换只有在同一坐标系下才有意义)
矩阵变换是基于基向量组的结果
- 矩阵变换之于同一个坐标系,可以理解为坐标系不变,点的位置改变
- 矩阵变换之于不同坐标系,可以理解为点的绝对位置不变,坐标系改变
x^{'}\\
y^{'}\\
\end{array} \right] =B\left[ \begin{array}{c}
x\\
y\\
\end{array} \right] \Rightarrow \left[ \begin{array}{c}
x\\
y\\
\end{array} \right] =B^{-1}\left[ \begin{array}{c}
x^{'}\\
y^{'}\\
\end{array} \right] \text{,}B=\left[ \begin{matrix}
\overrightarrow{b_1}& \overrightarrow{b_2}\\
\end{matrix} \right] \text{,且}\overrightarrow{b_1}\text{,}\overrightarrow{b_2}\text{是坐标系}B\text{的基向量}
\]
其中,矩阵B的各个列向量分别对应B坐标系的各个基向量,\(
\left[ \begin{array}{c}
x\\
y\\
\end{array} \right]
\)是向量\(
\overrightarrow{OP}
\)或者说点P在B坐标系的表示,\(
\left[ \begin{array}{c}
x^{'}\\
y^{'}\\
\end{array} \right]
\)则是向量\(
\overrightarrow{OP}
\)或者点P在A坐标系中的表示
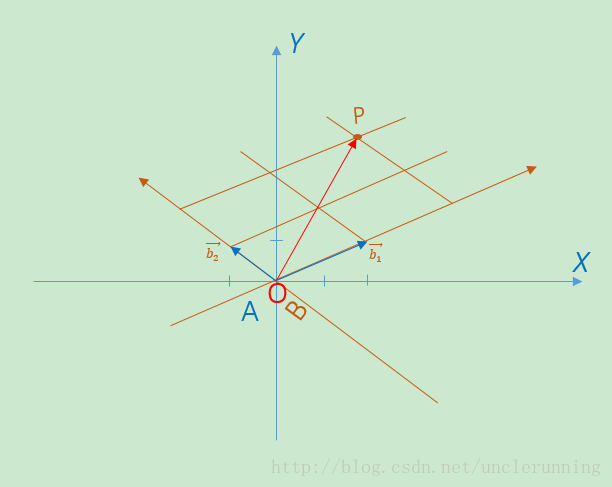
以图中的两个向量\(
\overrightarrow{b_1}
\),\(
\overrightarrow{b_2}
\)为基确定一个坐标系B,显然在B坐标系中\(
\overrightarrow{b_{1B}}=\left[ \begin{array}{c}
1\\
0\\
\end{array} \right]
\),\(
\overrightarrow{b_{2B}}=\left[ \begin{array}{c}
0\\
1\\
\end{array} \right]
\),接下来,将\(
\overrightarrow{b_1}
\),\(
\overrightarrow{b_2}
\)定位到A坐标系中,得到\(
\overrightarrow{b_{1A}}=\left[ \begin{array}{c}
2\\
1\\
\end{array} \right]
\),\(
\overrightarrow{b_{2A}}=\left[ \begin{array}{c}
-1\\
1\\
\end{array} \right]
\)
\(
\because \overrightarrow{OP}=2\overrightarrow{b_1}+2\overrightarrow{b_2}
\)
\(
\therefore \overrightarrow{OP}\)在B坐标系中的表示为\(
\left[ \begin{array}{c}
2\\
2\\
\end{array} \right]
\),现在,将\(
\overrightarrow{OP}
\)用A坐标系描叙:
\(
\overrightarrow{OP}=2\overrightarrow{b_1}+2\overrightarrow{b_2}=2\overrightarrow{b_{1A}}+2\overrightarrow{b_{2A}}=\left[ \begin{matrix}
\overrightarrow{b_{1A}}& \overrightarrow{b_{2A}}\\
\end{matrix} \right] \left[ \begin{array}{c}
2\\
2\\
\end{array} \right] =\left[ \begin{array}{c}
2\\
4\\
\end{array} \right]
\\
\)
现在,令矩阵B=\(
\left[ \begin{matrix}
\overrightarrow{b_{1A}}& \overrightarrow{b_{2A}}\\
\end{matrix} \right]
\),P点是用B坐标系表示的任意一点\((x,y)\)。
于是\(
\overrightarrow{OP}
\)在A坐标系中的表示\(
\left[ \begin{array}{c}
^{x^{'}}\\
y^{'}\\
\end{array} \right] =B\left[ \begin{array}{c}
x\\
y\\
\end{array} \right]
\),显然,B是可逆的,于是就有了之前的结论
那么在这个例子当中,当我们需要知道某点在转换坐标系后的新坐标时,通过该例子也可以加深印象,比如在B坐标系下有点\(Q(3,4)\),即\(\overrightarrow{OQ}=(3,4)\),跟据刚才的例子可以看出它转换在A坐标系下的点
\overrightarrow{b_{1A}}& \overrightarrow{b_{2A}}\\
\end{matrix} \right] \left[ \begin{array}{c}
3\\
4\\
\end{array} \right] =\left[ \begin{matrix}
2& -1\\
1& 1\\
\end{matrix} \right] \left[ \begin{array}{c}
5\\
4\\
\end{array} \right] =\left[ \begin{array}{c}
6\\
9\\
\end{array} \right]
\]
即转换到A坐标系下的点\(Q^{'}\)的坐标为\(Q^{'}(6,9)\)
虽然这里的讨论是基于二维的,但是,结论可以扩展到任意维度
阐述结论:
将B坐标系的基向量定位到A坐标系,然后将定位之后的基向量作为矩阵B的列向量,用矩阵B对B坐标系中的点P的坐标进行矩阵变换,将得到点P在A坐标系中的坐标。这个过程,就是从坐标系B到坐标系A的一个追溯过程
View/Camera Transformation
先将相机移到原点,然后进行分别对坐标轴进行旋转,用矩阵表示则是\(M_{view}=R_{view}T_{view}\)
- 将相机移回原点
1& 0& 0& -x_e\\
0& 1& 0& -y_e\\
0& 0& 1& -z_e\\
0& 0& 0& 1\\
\end{matrix} \right]
\]
- \(Rotate\,\,g\,\,to\,\,-Z, t\,\,to\,\,Y, \left( g×t \right) \,\,To\,\,X\)
g是相机看的方向(lookAt),t是相机向上的方向(Up),也就是相机的-Z轴和Y轴,两个向量叉积就是另一个坐标轴
x_{\widehat{g}×\widehat{t}}& x_t& x_{-g}& 0\\
y_{\widehat{g}×\widehat{t}}& y_t& y_{-g}& 0\\
z_{\widehat{g}×\widehat{t}}& z_t& z_{-g}& 0\\
0& 0& 0& 1\\
\end{matrix} \right]
\]
旋转矩阵是正交矩阵,所以旋转矩阵的逆就是旋转矩阵的转置
x_{\widehat{g}×\widehat{t}}& y_{\widehat{g}×\widehat{t}}& z_{\widehat{g}×\widehat{t}}& 0\\
x_t& y_t& y_t& 0\\
x_{-g}& y_{-g}& z_{-g}& 0\\
0& 0& 0& 1\\
\end{matrix} \right]
\]
正交投影矩阵
无论是正交投影还是透视投影,都是要将x、y、z移到-1到1的范围内,先将中心点移到原点,然后缩放
\frac{2}{r-l}& 0& 0& 0\\
0& \frac{2}{t-b}& 0& 0\\
0& 0& \frac{2}{n-f}& 0\\
0& 0& 0& 1\\
\end{matrix} \right) \left( \begin{matrix}
1& 0& 0& -\frac{r+l}{2}\\
0& 1& 0& -\frac{t+b}{2}\\
0& 0& 1& -\frac{n+f}{2}\\
0& 0& 0& 1\\
\end{matrix} \right)
\]
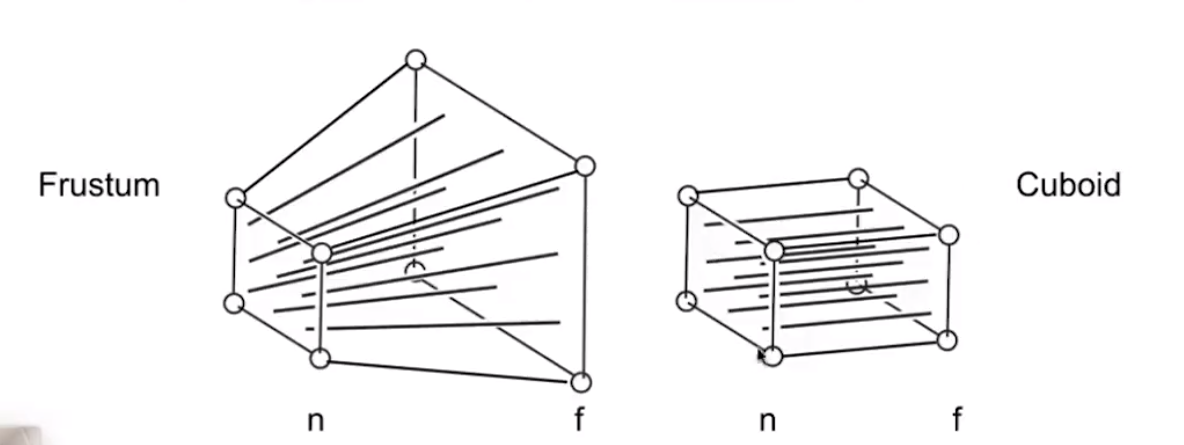
透视投影矩阵推导
首先先将frustum 转变为cuboid(n -> n,f -> f)(\(
M_{persp->ortho}
\)
)
然后再做正交投影
整个投影变换包括两部分
- v = P(矩阵)*p
- \(v=\frac{v}{v_w}=\frac{v}{pz}\)透视除法
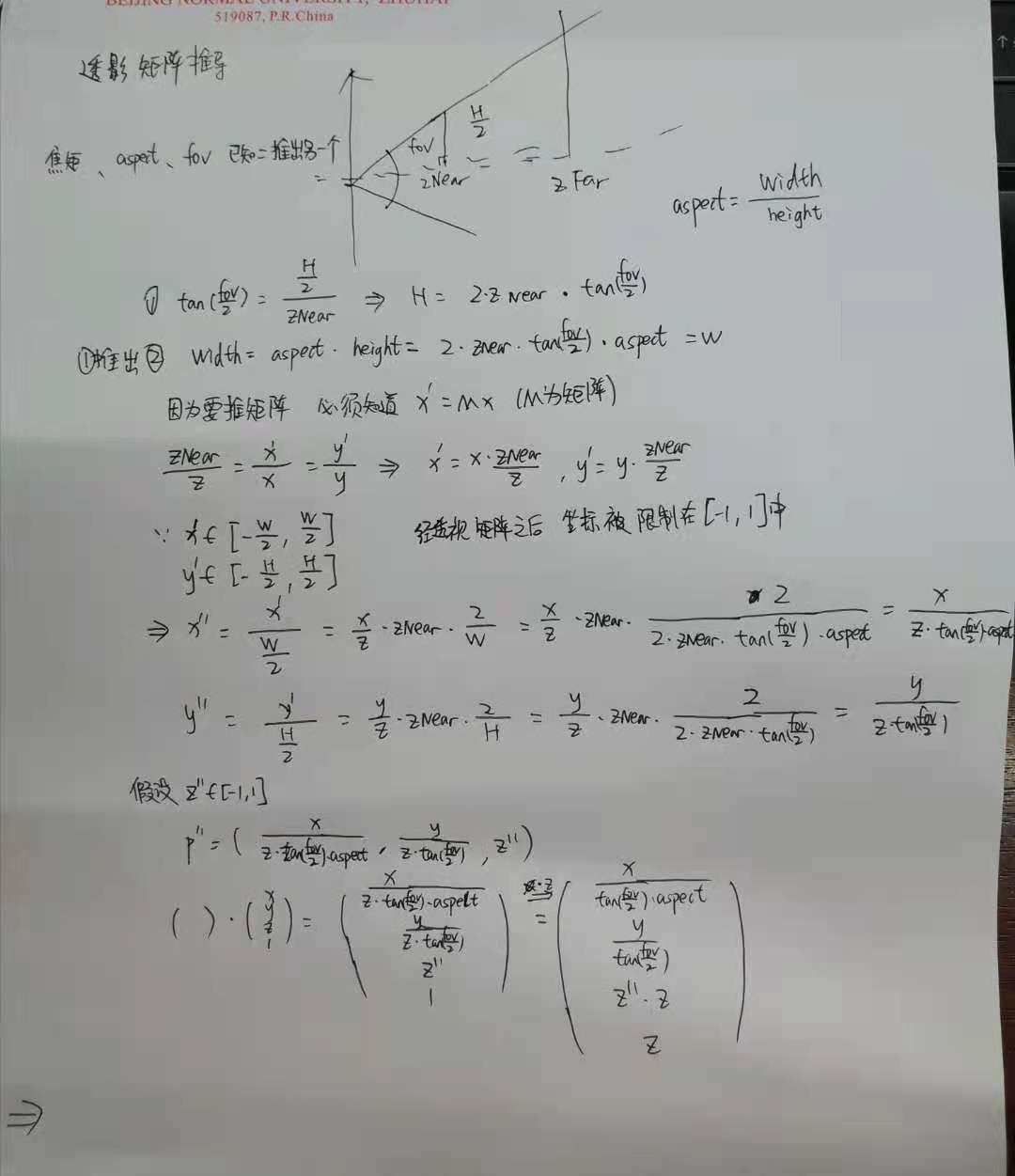
以上大概推出等式这一步,接下来用公式展示更为直观
m00& m01& m02& m03\\
m10& m11& m12& m13\\
m20& m21& m22& m23\\
m30& m31& m32& m33\\
\end{matrix} \right) \left( \begin{array}{c}
x\\
y\\
z\\
1\\
\end{array} \right) =\left( \begin{array}{c}
\frac{x}{z*aspect*\tan \left( \frac{fov}{2} \right)}\\
\frac{y}{z*tan\left( \frac{fov}{2} \right)}\\
z^{‘’}\\
1\\
\end{array} \right)
\]
\]
将右边的四维列向量表示的坐标每一项乘以z,所以有
m00& m01& m02& m03\\
m10& m11& m12& m13\\
m20& m21& m22& m23\\
m30& m31& m32& m33\\
\end{matrix} \right) *\left( \begin{array}{c}
x\\
y\\
z\\
1\\
\end{array} \right) =\left( \begin{array}{c}
\frac{x}{aspect*\tan \left( \frac{fov}{2} \right)}\\
\frac{y}{\tan \left( \frac{fov}{2} \right)}\\
z*z^{{'}{'}}\\
z\\
\end{array} \right)
\]
所以求得矩阵为
\frac{1}{aspect*\tan \left( \frac{fov}{2} \right)}& 0& 0& 0\\
0& \frac{1}{\tan \left( \frac{fov}{2} \right)}& 0& 0\\
0& 0& m22& m23\\
0& 0& 1& 0\\
\end{matrix} \right)
\]
\\
\Rightarrow m22+\frac{m23}{z}=z^{{'}{'}}
\]
因为z=zNear时,z''=-1;z=zFar时,z''=1所以有以下等式
\\
m22+\frac{m23}{zFar}=1
\]
联立求得:
\\
m23=\frac{2*zFar*zNear}{zNear-zFar}
\]
最后求得投影矩阵为
\frac{1}{aspect*\tan \left( \frac{fov}{2} \right)}& 0& 0& 0\\
0& \frac{1}{\tan \left( \frac{fov}{2} \right)}& 0& 0\\
0& 0& \frac{-zFar-zNear}{zNear-zFar}& \frac{2*zNear*zFar}{zNear-zFar}\\
0& 0& 1& 0\\
\end{matrix} \right)
\]
将这样得矩阵乘以视锥体内的一个顶点坐标,得到一个新的向量,再将这个向量的每个分量除以第四个分量(此步骤也被称为透视除法)(w),这样就可以得到顶点映射到规则立方观察体后的新的坐标
注意:z坐标的映射方式的获得,最后我们是为了方便矩阵乘法的操作方向求得了z坐标与cvv中的z坐标的映射方式:
\]
此时的映射并不是线性的,当z越大时,z的变化对z''的扰动越小
Canonical Cube to Screen
- Irrelevant to z
- Transform in xy plane : [-1, 1] to [0, width] × [0, height]
- Viewport transform matrix:
视口矩阵
\frac{width}{2}& 0& 0& \frac{width}{2}\\
0& \frac{height}{2}& 0& \frac{height}{2}\\
0& 0& 1& 0\\
0& 0& 0& 1\\
\end{matrix} \right]
\]
深度z的计算
前言
3D光栅化发生在图元被变换到Screen space之后,因为这里的Screen space与2D的Screen Space完全一致,所以2D的光栅化算法在这里依然适用。
然而由于图元经过了投影变换,且投影变换为非线性变换,所以不能用简单的线性插值获取fragment的属性
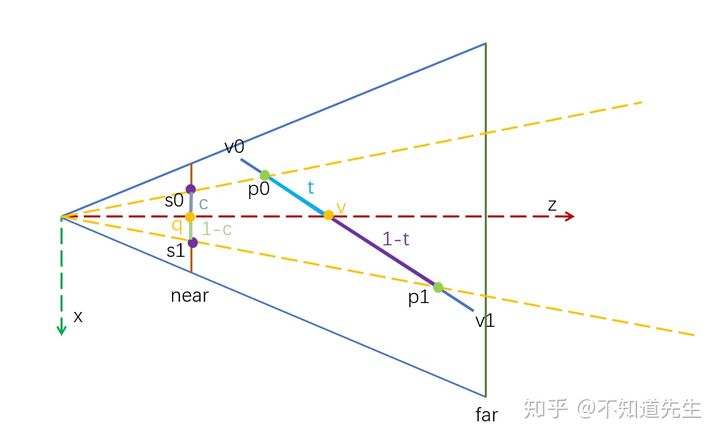
如上图所示,view space中的线段v0v1上两点$
p0\left( p0_x,p0_y,p0_z,1 \right)
$,$
p1\left( p1_x,p1_y,p1_z,1 \right)
$在near plane上的投影为点$
s0\left( s0_x,s0_y \right)
$,$
s1\left( s1_x,s1_y \right)
$。$
p0
$,$p1$中间一点$v(v_x,v_y,v_z,1)$在near plane上的投影为点$q(q_x,q_y)$。从图中可以看出点v到p0,p1的距离比值与点q到s0,s1的距离比值完全不同,投影变换不保持距离不变。
为了执行z-buffer算法,需要通过点q获取到v的深度值(z)
点\(v\)的深度值可以通过如下方法插值得到:
\]
以下是推导的过程:
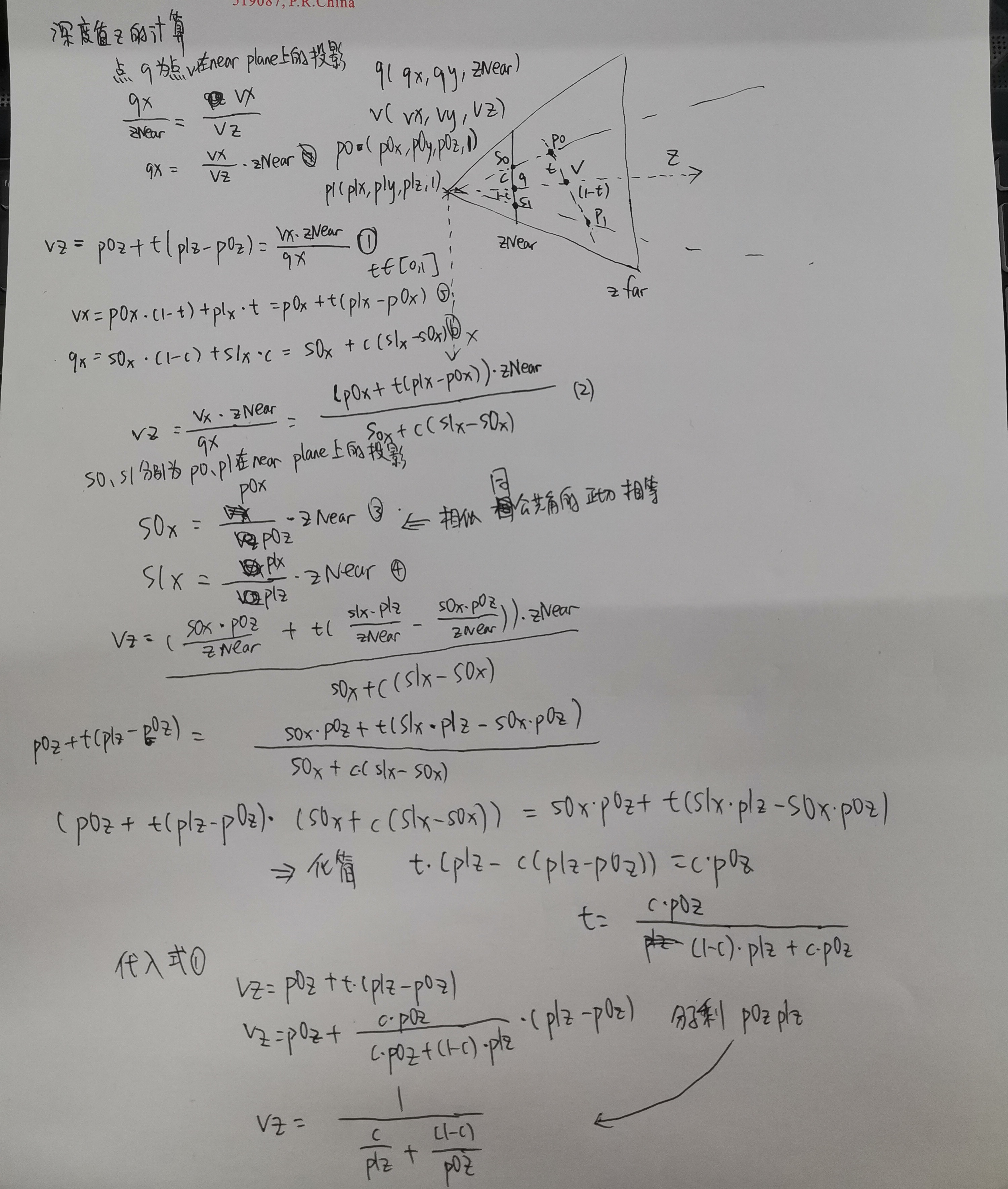
手写版:
文字版:
由于点\(q\)为点\(v\)在near plane上的投影,因此点\(q\)与点\(v\)的关系为:
- \(q_x=\frac{v_x·near}{v_z}\)
且\(v\)位于\(p0p1\)之间,则 - \(v_z=p0_{z}+t·(p1_z-p0_z)=\frac{v_x·near}{q_x}\)
由点\(v\)在\(p0\),\(p1\)之间,点\(q\)在\(s0\),\(s1\)之间则有 - \(v_x=p0_{x}·(1-t)+p1_{x}·t=p0_{x}+t·(p1_{x}-p0_{x})\)
- \(q_x=s0_{x}·(1-c)+s1_{x}·c=s0_{x}+c·(s1_{x}-s0_{x})\)
代入式(1)可得
\(v_z=\frac{v_x·near}{q_x}=\frac{(p0_x+t·(p1_x-p0_x))·near}{s0_x+c·(s1_x-s0_x)}\)式(2)
又s0和s1分别为p0和p1在near plane上的投影,则: - \(s0_x=\frac{p0_x·near}{p1_z}\)
- \(s1_x=\frac{p1_x·near}{p1_z}\)
代入式(2)可得:
\]
\\
v_z=\frac{\left( p0_x·s0_x+t·\left( p1_x·s1_x-p0_x·s0_x \right) \right)}{s0_x+c·\left( s1_x-s0_x \right)}
\\
p0_z+t·\left( p1_z-p0_z \right) =\frac{\left( p0_x·s0_x+t·\left( p1_x·s1_x-p0_x·s0_x \right) \right)}{s0_x+c·\left( s1_x-s0_x \right)}
\\
\left( p0_z+t·\left( p1_z-p0_z \right) \right) ·\left( s0_x+c·\left( s1_x-s0_x \right) \right) =p0_x·s0_x+t·\left( p1_x·s1_x-p0_x·s0_x \right)
\\
p0_z·s0_x+p0_z·c·\left( s1_x-s0_x \right) +t·\left( p1_z-p0_z \right) ·s0_x+t·c·\left( p1_z-p0_z \right) ·\left( s1_x-s0_x \right) =p0_x·s0_x+t·\left( p1_x·s1_x-p0_x·s0_x \right)
\]
化简得:
\]
则:
\]
代入式(1)可得
\]
\]
\]
若View Space中三角形\(v0v1v2\),变换到Screen Space后为三角形\(s0s1s2\),\(v0v1v2\)内一点v在Screen Space的投影点\(s0s1s2\)内的点\(q\),对三角形\(s0s1s2\)内的点(fragment)\(q\),可以通过如下方法取得fragment\(q\)在View Space中对应的深度值:
\]
\(\lambda0,\lambda1,\lambda2\)为点p在三角形\(s0s1s2\)内的重心坐标
引入结论:
对Screen Space三角形\(s0,s1,s2\)内一点p的任意属性插值的公式为:
\]
\(\lambda0,\lambda1,\lambda2\)为点\(p\)的重心坐标,\(z0,z1,z2,z\)分别为\(s0,s1,s2,p\)在view space中对应点的深度值,可以用这个方法插值得到\(p\)在NDC Space内对应点的深度值
罗德里格斯旋转公式
字写得不好,在爬了...
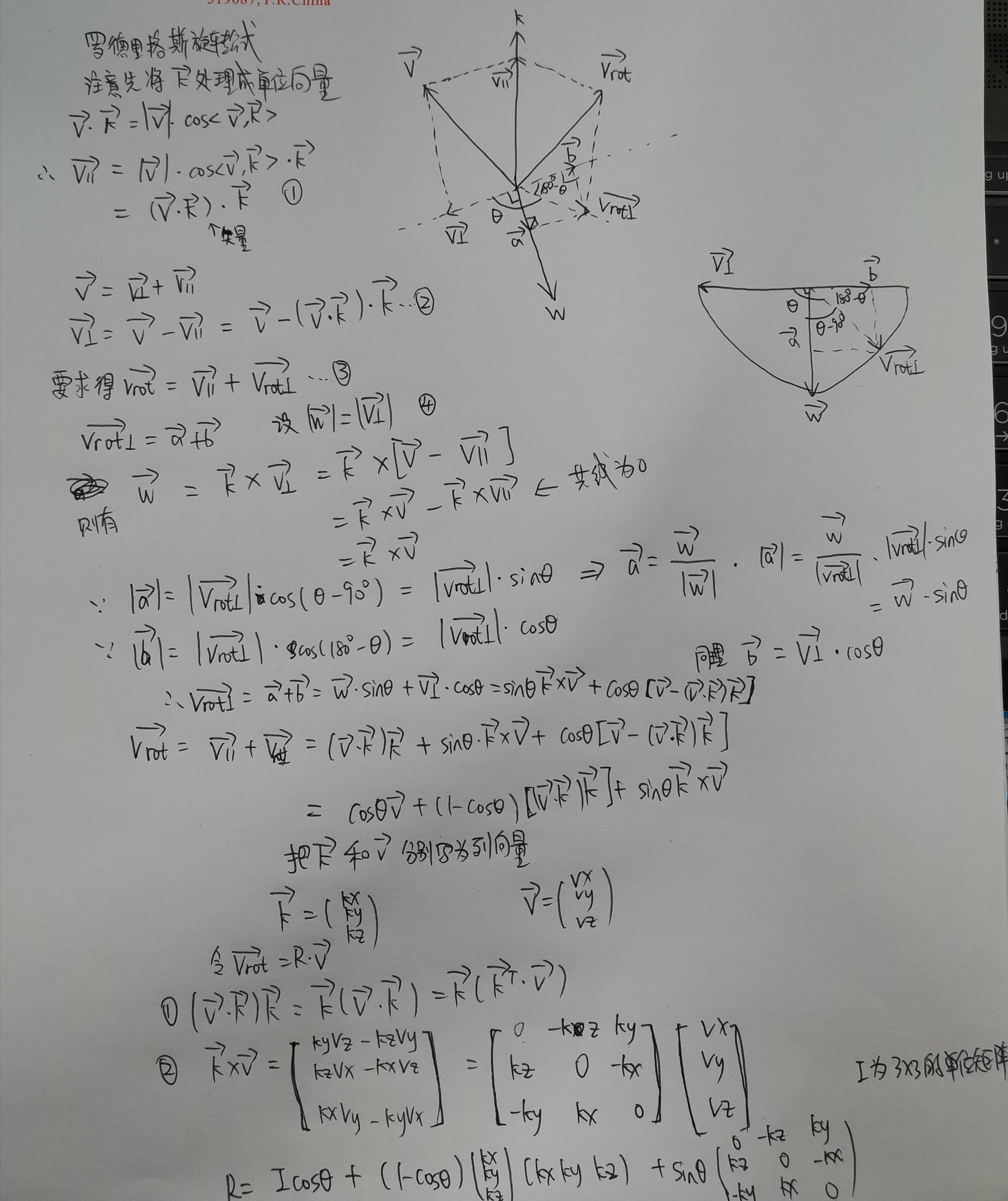
手写版:
文字版:
首先先将\(\overrightarrow{k}\)处理成单位向量,这点很重要,关乎着下一步等式是否成立,有些博文写这里不需要处理单位向量,这是错的
\]
可得
\\
\overrightarrow{v}=\overrightarrow{v_{\bot}}+\overrightarrow{v_{||}}
\\
\overrightarrow{v_{\bot}}=\overrightarrow{v}-\overrightarrow{v_{||}}=\overrightarrow{v}-\left( \overrightarrow{v}·\overrightarrow{k} \right) \overrightarrow{k}
\]
绕\(\overrightarrow{k}\)做旋转时,向下做垂线,可看作底部经过了类似半圆的旋转
要求得\(\overrightarrow{v_{rot}}=\overrightarrow{v_{||}}+\overrightarrow{v_{rot\bot}}\),将\(\overrightarrow{v_{rot\bot}}\)作正交分解有\(
\overrightarrow{v_{rot\bot}}=\overrightarrow{a}+\overrightarrow{b}
\),易得\(
|\overrightarrow{w}|=|\overrightarrow{v_{\bot}}|
\),则有\(
\overrightarrow{w}=\overrightarrow{k}×\overrightarrow{v_{\bot}}=\overrightarrow{k}×\left[ \overrightarrow{v}-\overrightarrow{v_{||}} \right] =\overrightarrow{k}×\overrightarrow{v}-\overrightarrow{k}×\overrightarrow{v_{||}}=\overrightarrow{k}×\overrightarrow{v}-0=\overrightarrow{k}×\overrightarrow{v}
\)
接下来求\(
\overrightarrow{a}
\)和\(
\overrightarrow{b}
\)
\\
\overrightarrow{a}=\frac{\overrightarrow{w}}{|\overrightarrow{w}|}·|\overrightarrow{a}|=\frac{\overrightarrow{w}}{|\overrightarrow{v_{rot\bot}}|}·|\overrightarrow{v_{rot\bot}}|·\sin \left( \theta \right) =\overrightarrow{w}·\sin \left( \theta \right)
\]
\\
\overrightarrow{b}=\frac{\overrightarrow{v_{\bot}}}{|\overrightarrow{v_{\bot}}|}·|\overrightarrow{b}|=\frac{\overrightarrow{v_{\bot}}}{|\overrightarrow{v_{\bot}}|}·|\overrightarrow{v_{rot\bot}}|·\cos \left( \theta \right) =\overrightarrow{v_{\bot}}·\cos \left( \theta \right) \,\, \text{注意}|\overrightarrow{v_{\bot}}|=|\overrightarrow{v_{rot\bot}}|
\]
\\
\overrightarrow{v_{rot}}=\overrightarrow{v_{||}}+\overrightarrow{v_{rot\bot}}=\left( \overrightarrow{v}·\overrightarrow{k} \right) \overrightarrow{k}+\sin \left( \theta \right) ·\left( \overrightarrow{k}×\overrightarrow{v} \right) +\cos \left( \theta \right) \left( \overrightarrow{v}-\left( \overrightarrow{v}·\overrightarrow{k} \right) \overrightarrow{k} \right)
\\
=\cos \left( \theta \right) \overrightarrow{v}+\left( 1-\cos \left( \theta \right) \left( \overrightarrow{v}·\overrightarrow{k} \right) \overrightarrow{k} \right) +\sin \left( \theta \right) ·\left( \overrightarrow{k}×\overrightarrow{v} \right)
\]
把\(
\overrightarrow{k}
\)和\(
\overrightarrow{v}
\)分别写为列向量
k_x\\
k_y\\
k_z\\
\end{array} \right)
\]
v_x\\
v_y\\
v_z\\
\end{array} \right)
\]
令\(
\overrightarrow{v_{rot}}=R·\overrightarrow{v}
\)
两个式子
\]
k_yv_z-k_zv_y\\
k_zv_x-k_xv_z\\
k_xv_y-k_yv_x\\
\end{array} \right] =\left[ \begin{matrix}
0& -k_z& k_y\\
k_z& 0& -k_x\\
-k_y& k_x& 0\\
\end{matrix} \right] \left[ \begin{array}{c}
v_x\\
v_y\\
v_z\\
\end{array} \right]
\]
结合以上两个式子可得,其中\(I\)为3×3的单位矩阵
k_x\\
k_y\\
k_z\\
\end{array} \right) \left( \begin{matrix}
k_x& k_y& k_z\\
\end{matrix} \right) +\sin \left( \theta \right) \left( \begin{matrix}
0& -k_z& k_y\\
k_z& 0& -k_x\\
-k_y& k_x& 0\\
\end{matrix} \right) \,\,
\]
以下是比较通用的表示方式
0& -n_z& n_y\\
n_z& 0& -n_x\\
-n_y& n_x& 0\\
\end{matrix} \right)
\]
部分引用的博文
https://blog.csdn.net/unclerunning/article/details/70948696#齐次坐标系与平移
https://zhuanlan.zhihu.com/p/45757899
回顾Games101图形学(一)几何变换中一些公式的推导的更多相关文章
- 《Shader入门精要》中MVP变换的Projection矩阵与《GAMES101图形学入门》中的区别
game101的透视投影的投影矩阵是这样的 正交投影是这样的 而shader入门精要的透视投影矩阵是这样子 正交投影矩阵是这样子 game101的透视投影是这样得到的 而正交投影的时候并没有假设中心点 ...
- 回顾games101中的SSAA和MSAA
回顾games101中的AA(抗锯齿) 前言 善于进行课后总结,可以更加巩固自己的知识和具体细节 锯齿(走样)产生的原因 本质上,在光栅化阶段中,用有限离散的数据想表示连续的(类似三角形的某一边),就 ...
- [word]2010中插入公式自动编号并且公式不自动缩小/变小
要实现在word2010中插入公式自动编号,就要用到自动图文集功能,具体操作如下: 1.先制定制表位位置:单击一个空白段落,然后双击标尺线的底部:这会激活"制表位"对话框,如图所示 ...
- Microsoft Office Word 中的公式自动编号
先插入公式,#,插入题注(交叉引用),生成了标号.此时整个公式是题注样式.在公式和标号之间插入一个样式分隔符. ____________________________________________ ...
- 不用MathType, 如何在Mac Word中插入公式
不用MathType, 如何在Mac Word中插入公式 找了好久都找不到MathType的破解版,不得不使用免费清爽的MarkDown编辑工具Typora_for_Mac. 我是很喜欢Typora的 ...
- 在jupyter notebook 中编辑公式
jupyter notebook是一个python的交互式开发环境,广泛应用于数据分析的场景下. 在jupyter notebook中,还可以很方便的编辑数学公式. 1.Markdown状态 编辑公式 ...
- Word 中实现公式居中编号右对齐 -- 含视频教程(9)
1. 两种方法 不管你用「Word 自带公式」还是「Mathtype」,一般来说,Word 中实现公式居中编号右对齐的方法有两种.(1):表格法:(2):制表位. 2. 方法1:表格法 >> ...
- 在Markdown中写公式块
Markdown是一种可以使用普通文本编辑器编写的标记语言,通过简单的标记语法,它可以使普通文本内容具有一定的格式. Markdown中的公式语法是遵循LaTex语法的 $ sum = \sum_{i ...
- MathType的配置问题;将word中的公式转换为mathtype格式失败,缺少OMML2MML.XSL
安装MathType后打开word报错 打开会出现以下问题: 首先,把startup添加到word的信任中心: 要确保路径被office信任.依次打开word->文件->选项->信任 ...
随机推荐
- Vue中的MVVM
MVVM(Model View VueModel) View层: 视图层 在我们前端开发中,通常就是DOM层 主要的作用就是给用户展示各种信息 Model层: 数据层 数据可能是我们固定的死数据,更多 ...
- Codeforces Round #697 (Div. 3)
A.Odd Divisor 题意:问一个数是不是含有奇数因子 思路:就直接给这个数循环除以2,看看最后剩下的数是不是0,如果不是就有奇数因子,如果是就没有 想不到:1)当时想着用log2来解决问题,后 ...
- QFNU 10-02 19 training
B - Yet Another Crosses Problem 题意:找如果使图中某一行某一列全部变成黑色,至少需要把多少个白方格变成黑方格 思路:直接找就可以,注意存储的时候要记得进行分开存储,存储 ...
- 重新整理 .net core 实践篇————配置应用[一]
前言 本来想整理到<<重新整理.net core 计1400篇>>里面去,但是后来一想,整理 .net core 实践篇 是偏于实践,故而分开. 因为是重新整理,那么就从配置开 ...
- [Python] 基本概念
1.基本概念 三大特性:封装.继承.多态 继承:派生类继承基类的字段和方法 多态:对不同类型的变量进行相同的操作,却表现出不同的行为(例如对数字和字符做"+"运算) 封装:将数据和 ...
- [c++] 分号的使用
加分号的情况: 语句结束加分号(否则编译器不知道在哪里结束语句,编译器不识别换行,写代码时换行和退格只是为了看着舒服,但本质上代码是写给编译器看的) 声明语句后加分号(也是一种语句) 结构体.类定义后 ...
- [刷题] 77 Combinations
要求 给出两个整数n和k,在n个数字中选出k个数字的所有组合 示例 n=4 , k=2 [ [ 1, 2 ] , [ 1, 3 ] , [ 1, 4 ] , [ 2, 3 ] , [ 2, 4 ] , ...
- [刷题] PTA 7-32 说反话-加强版
题目描述: 给定一个英语句子,各个单词之间用空格分隔.要求编写程序,将所有单词倒序输出 输入示例: Hello World Here I Come 输出示例: Come I Here World He ...
- 【数据结构与算法】多种语言(VB、C、C#、JavaScript)系列数据结构算法经典案例教程合集目录
目录 1. 专栏简介 2. 专栏地址 3. 专栏目录 1. 专栏简介 2. 专栏地址 「 刘一哥与GIS的故事 」之<数据结构与算法> 3. 专栏目录 [经典回放]多种语言系列数据结构算法 ...
- 【排除解决】System.Runtime.InteropServices.ExternalException (0x80004005): GDI+ 中发生一般性错误
前言: 今天项目发布上线,发布到正式环境验证功能的时候忽然方向之前做的一个图片合成的功能报错了提示:System.Runtime.InteropServices.ExternalException ( ...