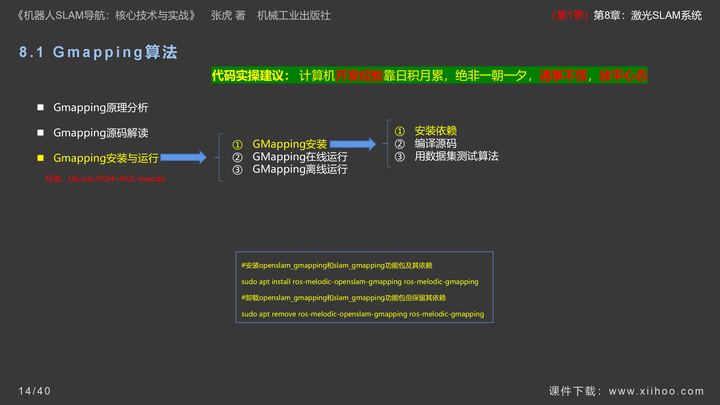
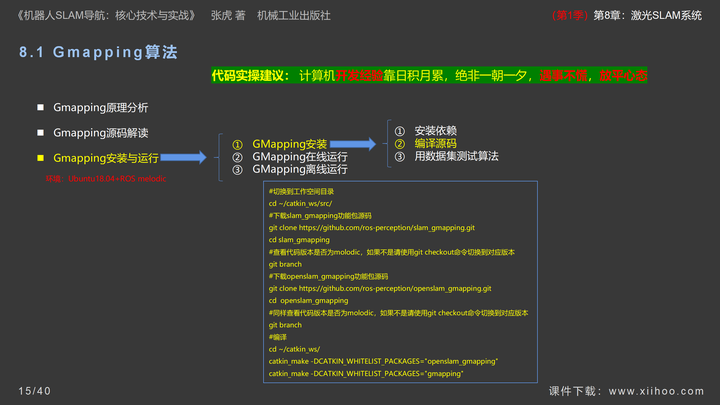
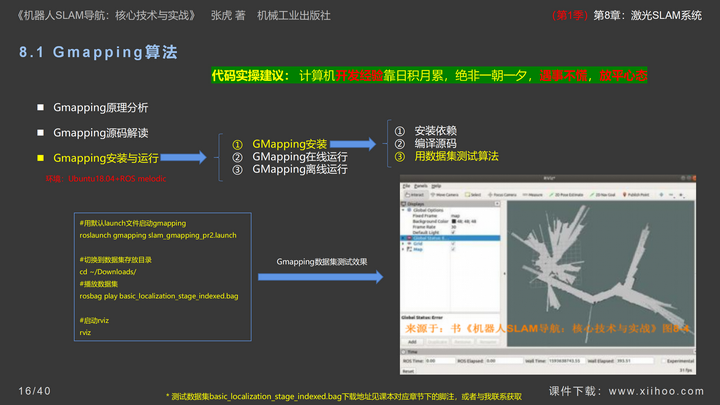
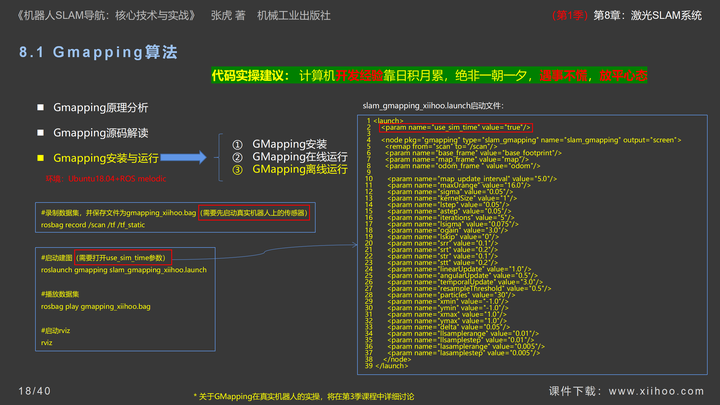
《机器人SLAM导航核心技术与实战》第1季:第8章_激光SLAM系统
- 先 导 课
- 第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
- 第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
- 第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
- 答 疑 课






- Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
《机器人SLAM导航核心技术与实战》第1季:第8章_激光SLAM系统的更多相关文章
- 《机器人SLAM导航核心技术与实战》第1季:第4章_机器人传感器
<机器人SLAM导航核心技术与实战>第1季:第4章_机器人传感器 视频讲解 [第1季]4.第4章_机器人传感器-视频讲解 [第1季]4.1.第4章_机器人传感器_惯性测量单元-视频讲解 [ ...
- RViz 实时观测机器人建立导航2D封闭空间地图过程 (SLAM) ----27
原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ ROS提供了非常强大的图形化模拟环境 RViz,这个 RViz 能做的事情非常多.今天我们学习一下如何使 ...
- SLAM+语音机器人DIY系列:(一)Linux基础——2.安装Linux发行版ubuntu系统
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- 除了ROS, 机器人定位导航还有其他方案吗?
利用ROS进行机器人开发,我想大多数企业是想借助ROS实现机器人的导航.定位与路径规划,它的出现大大降低了机器人领域的开发门槛,开发者无需向前人一样走众多弯路,掌握多种知识才能开始实现机器人设计的梦想 ...
- Elasticsearch核心技术与实战-学习笔记
学习资源: Elasticsearch中文社区日报https://elasticsearch.cn/article/ Elasticsearch 官网 https://www.elastic.co/ ...
- Kafka核心技术与实战,分布式的高性能消息引擎服务
Kafka是LinkedIn开发并开源的一套分布式的高性能消息引擎服务,是大数据时代数据管道技术的首选. 如今的Kafka集消息系统.存储系统和流式处理平台于一身,并作为连接着各种业务前台和数据后台的 ...
- Elasticsearch核心技术与实战,性能是真牛
Elasticsearch 是一款非常强大的开源搜索及分析引擎.结合 Kibana.Logstash和Beats,Elasticsearch 还被广泛运用在大数据近实时分析,包括日志分析.指标监控.信 ...
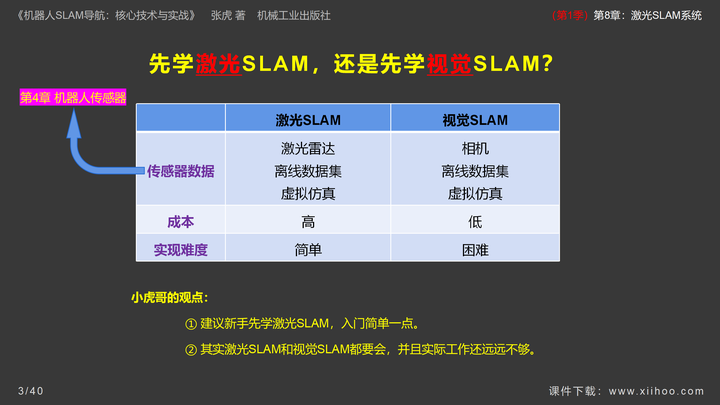
- 激光SLAM与视觉SLAM的特点
激光SLAM与视觉SLAM的特点 目前,SLAM技术被广泛运用于机器人.无人机.无人驾驶.AR.VR等领域,依靠传感器可实现机器的自主定位.建图.路径规划等功能.由于传感器不同,SLAM的实现方式也有 ...
- 激光SLAM Vs 视觉SLAM
博客转载自:https://www.leiphone.com/news/201707/ETupJVkOYdNkuLpz.html 雷锋网(公众号:雷锋网)按:本文作者SLAMTEC(思岚科技公号sla ...
- .NET Core实战项目之CMS 第十三章 开发篇-在MVC项目结构介绍及应用第三方UI
作为后端开发的我来说,前端表示真心玩不转,你如果让我微调一个位置的样式的话还行,但是让我写一个很漂亮的后台的话,真心做不到,所以我一般会选择套用一些开源UI模板来进行系统UI的设计.那如何套用呢?今天 ...
随机推荐
- Arcgis加载Geoserver矢量切片
原帖地址 洒家废物 - Arcgis加载Geoserver矢量切片 准备点线面图层并发布图层组 此处我准备了石家庄市的县界名称(点).高速公路(线).县界(面),依次发布geoserver服务,创建图 ...
- C 简答题
1.从C语⾔执⾏效率⽅便,简述下C语⾔采取了哪些措施提⾼执⾏效率.(14分 or 20分)(年年考,⾮常重要) ①使⽤指针:有些程序⽤其他语⾔也可以实现,但C能够更有效地实现:有些程序⽆法⽤其它语⾔实 ...
- AGC018
AGC018 B 题目大意 举办一场运动会,有 \(N\) 人,\(M\) 个项目,每个人所有项目都有一个排名,会选择参加排名最高且开设的项目,现在要开设若干项目使得人数最多的项目人数尽可能小,求这个 ...
- 3. 使用sql查询csv/json文件内容,还能关联查询?
1. 简介 我们在前面的文章提到了calcite可以支持文件系统的数据源适配, 其实官方已经提供了相应的能力, 其支持csv和json的查询适配, 废话不多说, 直接展示. 2. Maven < ...
- GDAL矢量数据集相关接口的资源控制问题
1. 引言 笔者在<使用GDAL读写矢量文件>这篇文章中总结了通过GDAL读写矢量的具体实现.不过这篇文章中并没有谈到涉及到矢量数据集相关接口的资源控制问题.具体来说,GDAL/OGR诞生 ...
- 安全、高效!天翼云HPFS助企业一臂之力!
近年来,随着各行业数智转型逐步深入以及人工智能大模型的蓬勃发展,气象分析.大模型训练.自动驾驶.石油勘探.EDA仿真.基因分析等高性能计算(HPC)场景和智算场景(AI)不仅对算力需求激增,也产生了图 ...
- 再获权威认可!天翼云论文被IEEE/ACM CCGrid收录
近日,由天翼云弹性网络开拓者团队撰写的<Towards Better QoS and Lower Costs of P4 EIP Gateway at the Edge>论文被The 24 ...
- Luogu P7077 CSP-S2020 函数调用 题解 [ 蓝 ] [ 拓扑排序 ] [ 动态规划 ] [ 数学 ]
函数调用:个人非常喜欢的一道拓扑题. 转化 这题一共有三种操作,不太好搞.而第一个函数看起来就比较可做,第三个函数显然就是让你拓扑转移,于是我们考虑第二个操作怎么处理. 当我们进行一个操作一后,假设当 ...
- Luogu P4588 数学运算 题解 [ 绿 ] [ 线段树 ]
Luogu P4588 数学运算. 虽然是一个很典的题,但里面的思想还是比较值得记录的. 假做法 一开始看到此题还以为是乘法逆元的模板题,但看到 \(m\) 与 \(M\) 不互质,就知道这种做法是假 ...
- 2025AI应用元年,DeepSeek让领域小模型训练成本急剧下降!
关注公众号回复1 获取一线.总监.高管<管理秘籍> 模型训练俗称炼丹,而炼丹是修士特权,这就显得模型训练离普通人很远了. 虽然是笑谈,但如果对其中情况不太了解确实也会因为其背后深厚.复杂的 ...