Using rqt_console and roslaunch
Description: This tutorial introduces ROS using rqt_console and rqt_logger_level for debugging and roslaunch for starting many nodes at once
debug工具
- rqt_console
- rqt_logger_level
rosrun rqt_console rqt_console #界面化的实时的日志监控
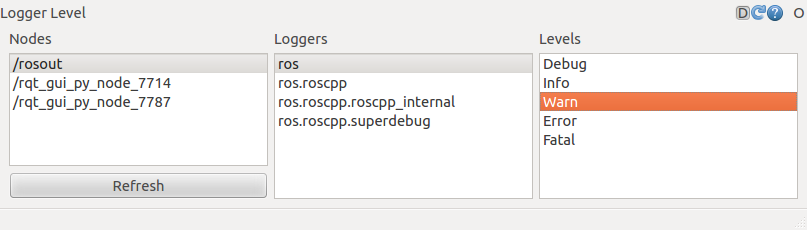
rosrun rqt_logger_level rqt_logger_level #界面化的用于设置日志级别
支持的日志级别
Fatal
Error
Warn
Info
Debug
roslaunch
echo $ROS_PACKAGE_PATH
<launch> --标明这是一个launch file
<group ns="turtlesim1"> --不同的namespace 允许有起2个同样name的node
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<group ns="turtlesim2">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<node pkg="turtlesim" name="mimic" type="mimic"> --起一个mimic node.
<remap from="input" to="turtlesim1/turtle1"/> --This renaming will cause turtlesim2 to mimic turtlesim1
<remap from="output" to="turtlesim2/turtle1"/>
</node>
</launch>
读取turtlemimic.launch文件启动node
roslaunch beginner_tutorials turtlemimic.launch
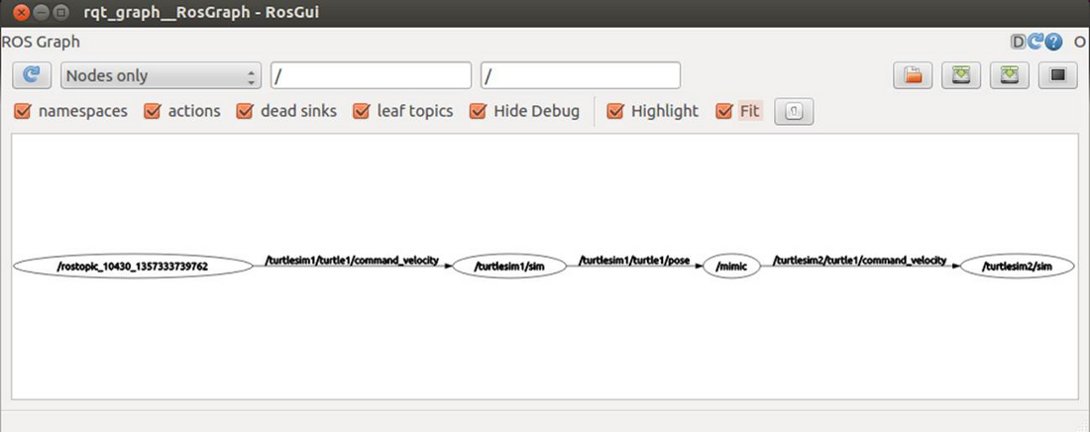
rqt或rqt_graph查看roslaunch实际做了什么
Using rqt_console and roslaunch的更多相关文章
- 理解ROS rqt_console和 roslaunch
1.使用rqt_console和roslaunch 这篇教程将介绍使用rqt_console和rqt_logger_level来调试以及使用roslaunch一次启动许多nodes.如果你使用ROS ...
- ROS学习(九)—— rqt_console 和 roslaunch
一.rqt_console 和rqt_logger_level 1.作用: rqt_console依据ROS编译日志,输出节点信息 rqt_logger_level可以改变节点的警告出差的警告等级 2 ...
- ROS学习手记 - 6 使用ROS中的工具:rqt_console & roslaunch & rosed
http://wiki.ros.org/ROS/Tutorials/UsingRqtconsoleRoslaunch Using rqt_console and roslaunch This tuto ...
- 使用 rqt_console 和 roslaunch---8
使用 rqt_console 和 roslaunch Description: 本教程介绍如何使用rqt_console和rqt_logger_level进行调试,以及如何使用roslaunch同时运 ...
- 快速了解 Robot Operating System(ROS) 机器人操作系统
http://www.ros.org/ 关于ROS About ROS http://www.ros.org/about-ros/ 机器人操作系统(ROS)是用于编写机器人软件的灵活框架.目的在简化 ...
- ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse
ROS机器人程序设计(原书第2版)补充资料 (柒) 第七章 3D建模与仿真 urdf Gazebo V-Rep Webots Morse 书中,大部分出现hydro的地方,直接替换为indigo或ja ...
- ROS_Kinetic_02 ROS Kinetic 迁移指南及中文wiki指南(Migration guide)
ROS_Kinetic_02 ROS Kinetic 迁移指南(Migration guide) 对于ROS Kinetic Kame有些功能包已经更新改变,提供关于这些包的迁移注意或教程.主要针对于 ...
- ROS教程
Learning ROS 学习ROS Depending on your learning style and preferences, you can take two approaches to ...
- ROS官网新手级教程总结
第 1 关卡:安装和配置 ROS 环境 目标:在计算机上安装和配置 ROS 环境. 安装 ROS 按照 ROS 安装说明进行安装. 管理环境 确定环境变量 ROS_ROOT 和 ROS_PACKAGE ...
随机推荐
- Shell 脚本处理用户输入
传递参数 跟踪参数 移动变量 处理选项 将选项标准化 获得用户的输入 bash shell提供了一些不同的方法来从用户处获取数据,包括命令行参数(添加在命令后数据),命令行选项(可以修改命令行为的单个 ...
- anaconda安装opencv(python)
1.win10 win10没有安装python,只安装了anaconda,然后使用pip安装opencv-python,版本很新,opencv_python4.0.0的. 网速有点莫名其妙,时快时慢 ...
- LSI IBM服务器阵列卡操作经历
说明:因为服务器的一个磁盘坏了,因为没有经验不敢操作.正好有一台撤下来的相同服务器,所以查找了各种教程,研究了一下各种操作.记录在这里,防止忘记.一.概念说明raid(自己百度)阵列卡组(group) ...
- Servlet 过滤器Filter
特点 1)Filter是依赖于Servlet容器,属于Servlet规范的一部分,在Servlet API中定义了三个接口类:Filter, FilterChain, FilterConfig. 2) ...
- python枚举类型
笔记: 一:枚举类型的定义二:枚举类和普通类的区别 1:值不可变 2:具有防止相同标签得功能,不同标签的值可以相同! 三:枚举类型.枚举值.枚举名称 1:VIP.YELLOW.Value 获得标签的值 ...
- 如何判断dt中所有行的状态并有选择的移除
DataRow drFocusedRow = dtCentralizerOptimalSelection.Rows[gvCentralizerOptimalSelection.FocusedRowHa ...
- Maven插件一览
maven-assembly-plugin 将对应模块依赖在 mvn package 阶段全部打到一个 jar 包里面: java -cp xx.jar package.name.MainClass ...
- RabbitMQ in Action (2): Running and administering Rabbit
Server management the Erlang node and the Erlang application Starting nodes multiple Erlang applicat ...
- 初学Java的那段日子
最近因为一个朋友想要学习Java,在帮助他找教程的过程中回想到了我自己当年学习Java的那段岁月,故写了此篇文章总结了一下初学Java所必须要掌握的知识点,然后把一部分常见的面试题罗列出来.给予刚刚开 ...
- [Swift]LeetCode250.计数相同值子树的个数 $ Count Univalue Subtrees
Given a binary tree, count the number of uni-value subtrees. A Uni-value subtree means all nodes of ...