ROS学习(九)—— rqt_console 和 roslaunch
一、rqt_console 和rqt_logger_level
1、作用:
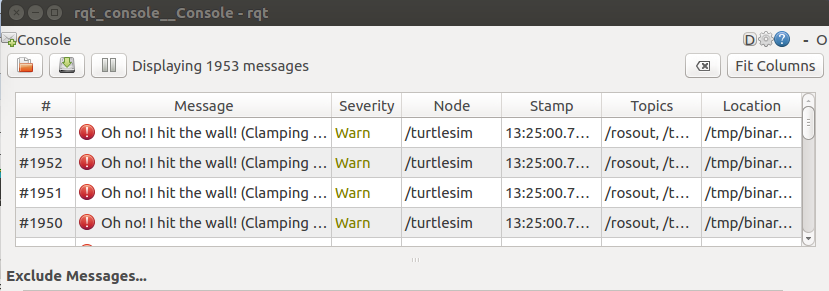
rqt_console依据ROS编译日志,输出节点信息
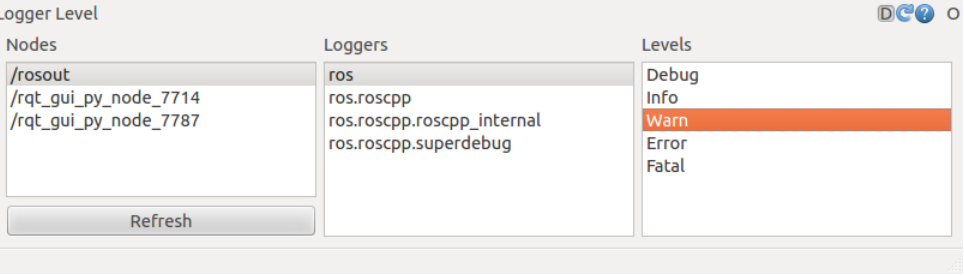
rqt_logger_level可以改变节点的警告出差的警告等级
2、使用方法
(1)打开rqt_console rqt_logger_level
rosrun rqt_console rqt_console
rosrun rqt_logger_level rqt_logger_level
(2)在新的终端,打开turtle
rosrun turtlesim turtlesim_node
在窗口会出现

然后我们改变logger level
(3)然后我们执行一条会出错的命令
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r -- '{linear: {x: 2.0, y: 0.0, z: 0.0}, angular: {x: 0.0,y: 0.0,z: 0.0}}'
会报错,撞到墙壁。
3、logger levels
有五个优先报错级别,从上到下,依次由高到低
Fatal
Error
Warn
Info
Debug
二、roslaunch
1、作用:
启动launch文件
2、语法
roslaunch [package] [filename.launch]
3、一个demo
(1)打开beginner_tutorials
cd ~/catkin_ws
source devel/setup.bash
roscd beginner_tutorials
(2)新建一个目录,用来存放launch文件(是一个好的习惯,可以不必这么做)
mkdir launch
cd launch
(3)新建一个launch文件:turtlemimic.launch
Toggle line numbers
<launch>
<group ns="turtlesim1">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<group ns="turtlesim2">
<node pkg="turtlesim" name="sim" type="turtlesim_node"/>
</group>
<node pkg="turtlesim" name="mimic" type="mimic">
<remap from="input" to="turtlesim1/turtle1"/>
<remap from="output" to="turtlesim2/turtle1"/>
</node>
</launch>
(4)调用launch文件
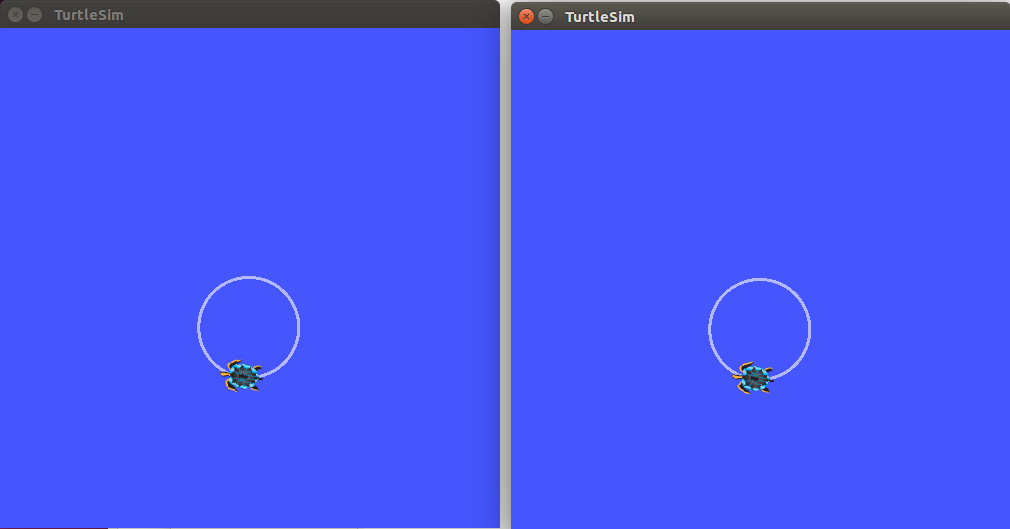
roslaunch beginner_tutorials turtlemimic.launch
再让其运动,第二个会复制第一个进行运动
rostopic pub /turtlesim1/turtle1/cmd_vel geometry_msgs/Twist -r -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'
ROS学习(九)—— rqt_console 和 roslaunch的更多相关文章
- ROS学习笔记8-rqt_console和roslaunch
本教程来自于:http://wiki.ros.org/ROS/Tutorials/UsingRqtconsoleRoslaunch rqt_console 和 rqt_logger_level 是ro ...
- Ros学习调试——rqt_console
1.rqt_console rqt_console:ROS日志框架(logging framework)的一部分,用来显示节点的输出信息 rqt_logger_level:允许我们修改节点运行时输出信 ...
- ROS学习手记 - 6 使用ROS中的工具:rqt_console & roslaunch & rosed
http://wiki.ros.org/ROS/Tutorials/UsingRqtconsoleRoslaunch Using rqt_console and roslaunch This tuto ...
- 理解ROS rqt_console和 roslaunch
1.使用rqt_console和roslaunch 这篇教程将介绍使用rqt_console和rqt_logger_level来调试以及使用roslaunch一次启动许多nodes.如果你使用ROS ...
- ROS学习笔记七:在ROS中使用USB摄像头
下面是一些USB摄像头的驱动(大多数摄像头都支持uvc标准): 1 使用软件库里的uvc-camera功能包 1.1 检查摄像头 lsusb ----------------------------- ...
- 关于ROS学习的一些反思
距离发布上一篇ROS的博客已经过去两年了,才发现原来自己已经这么久可没有写过关于ROS的文章,想来很是惭愧.这两年时间,自己怀着程序员的梦想,研究过RTOS,探索过Linux,编写过Android应用 ...
- ROS学习手记 - 2.1: Create and Build ROS Package 生成包(Python)
ROS学习手记 - 2.1: Create and Build ROS Package 生成包(Python) 时隔1年,再回来总结这个问题,因为它是ros+python开发中,太常用的一个操作,需要 ...
- ROS学习手记 - 8 编写ROS的Publisher and Subscriber
上一节我们完成了 message & srv 文件的创建和加入编译,这次我们要玩简单的Publisher 和 Subscriber 要玩 Publisher 和 Subscriber, 需要具 ...
- ROS学习(四)—— 创建ROS Package
一.caktin Package的组成 1.必须含有 package.xml文件,提供有关程序包的元信息 2.必须含有一个catkin版本的 CmakeLists.txt文件,如果是一个catkin元 ...
- ROS学习网址【原创】
ROS学习网址 http://www.ros.org/ http://www.ros.org/news/book/ http://wiki.ros.org/ http://blog.exbot.net ...
随机推荐
- 双数组Trie的一种实现
An Implementation of Double-Array Trie 双数组Trie的一种实现 原文:http://linux.thai.net/~thep/datrie/datrie.htm ...
- capwap学习笔记——初识capwap(一)
2 初识CAPWAP 2.1 CAPWAP简介 说了半天CAPWAP,连全称都还没说,汗-- CAPWAP--Control And Provisioning of Wireless Access P ...
- easyui datagrid实现拖动表头
$.extend($.fn.datagrid.methods, { columnMoving: function (jq) { return jq.each(function () { var tar ...
- OpenGL ES 3.0之Texturing纹理详解(一)
本文流程 1.Texturing基础 2.装载Texturing和mipmapping 3.纹理过滤和包装 4.Texture level-of-detail, swizzles, and depth ...
- 【转】Ionic3在ts中获取html中值的方法
我觉得有两种方法,都是Angular中的语法,一种是把值当做参数传递,另一种是使用ngModel实现双向绑定 还有一种很少用到的,Js的原生方法:document.getElementById('ch ...
- Swift语言精要 - 扩展(Extension)
swift的Extension用户在不访问代码的情况下扩展基本结构类型或自定义类 extension Int { var doubled : Int { } func multiplyWith(ano ...
- unity3d与web网页通信
总结一下: Unity3D 中的 C# 和 JavaScript 脚本之间是可以互相访问并交互的,但是要求这些被访问和操作的 C# 和 JavaScript 组件必须放在名为 Standard Ass ...
- ubuntu iptables设置【转】
root@qustdjx-K42JZ:/home/qustdjx# iptables -L -nChain INPUT (policy ACCEPT)target prot opt sourc ...
- MapReduce实现大矩阵乘法
来自:http://blog.csdn.net/xyilu/article/details/9066973 引言 何 为大矩阵?Excel.SPSS,甚至SAS处理不了或者处理起来非常困难,需要设计巧 ...
- flume-ng-elasticsearch 索引时间命名问题(时区和时间格式)
目前版本还不支持,只把索引名称的加载项传递过去了