树莓派4B-MAX9814麦克风模块
树莓派4B-MAX9814麦克风模块
硬件需求
- 树莓派
- MAX9814模块
- 杜邦线
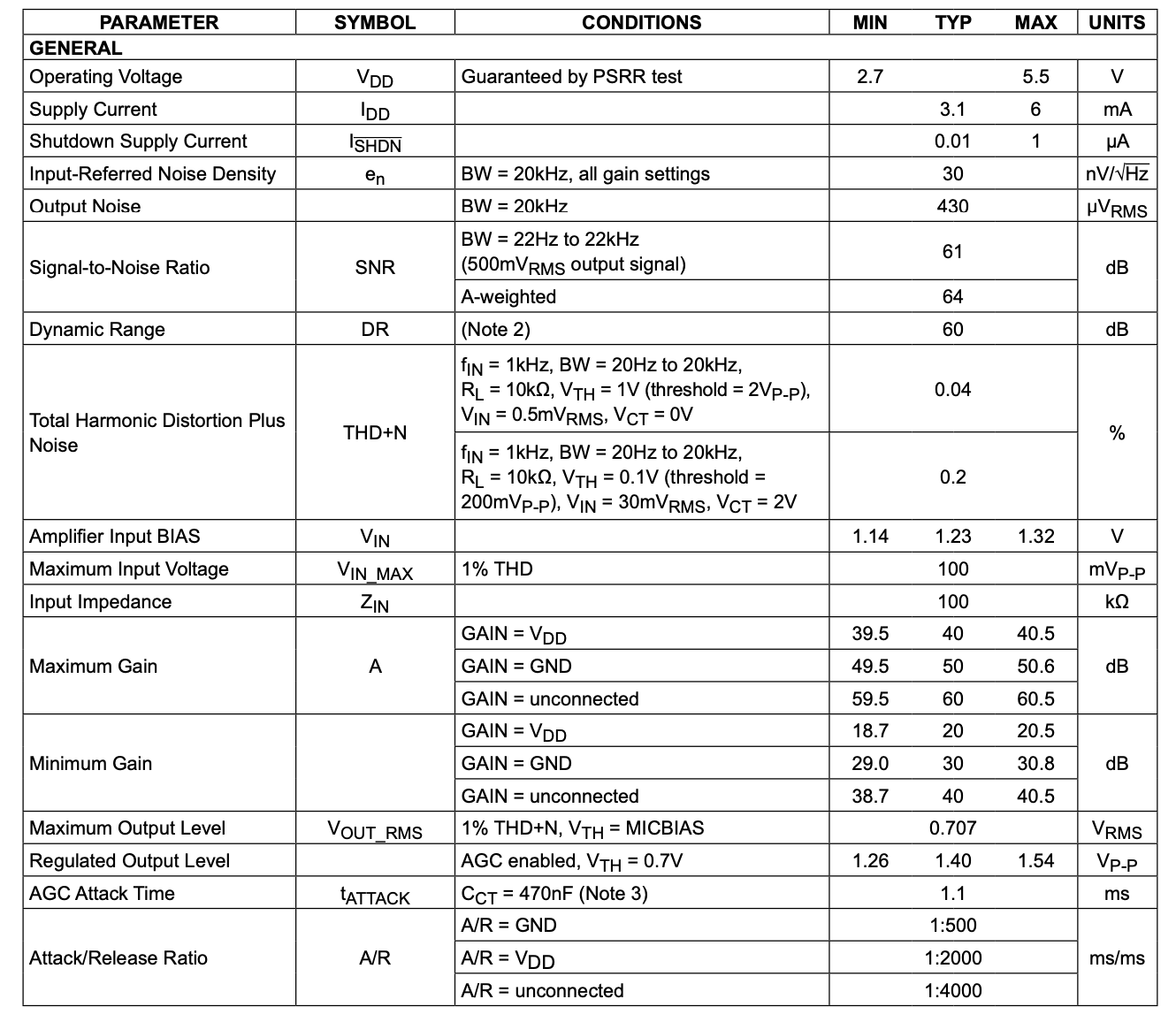
MAX9814模块
电子特性
实验电路板
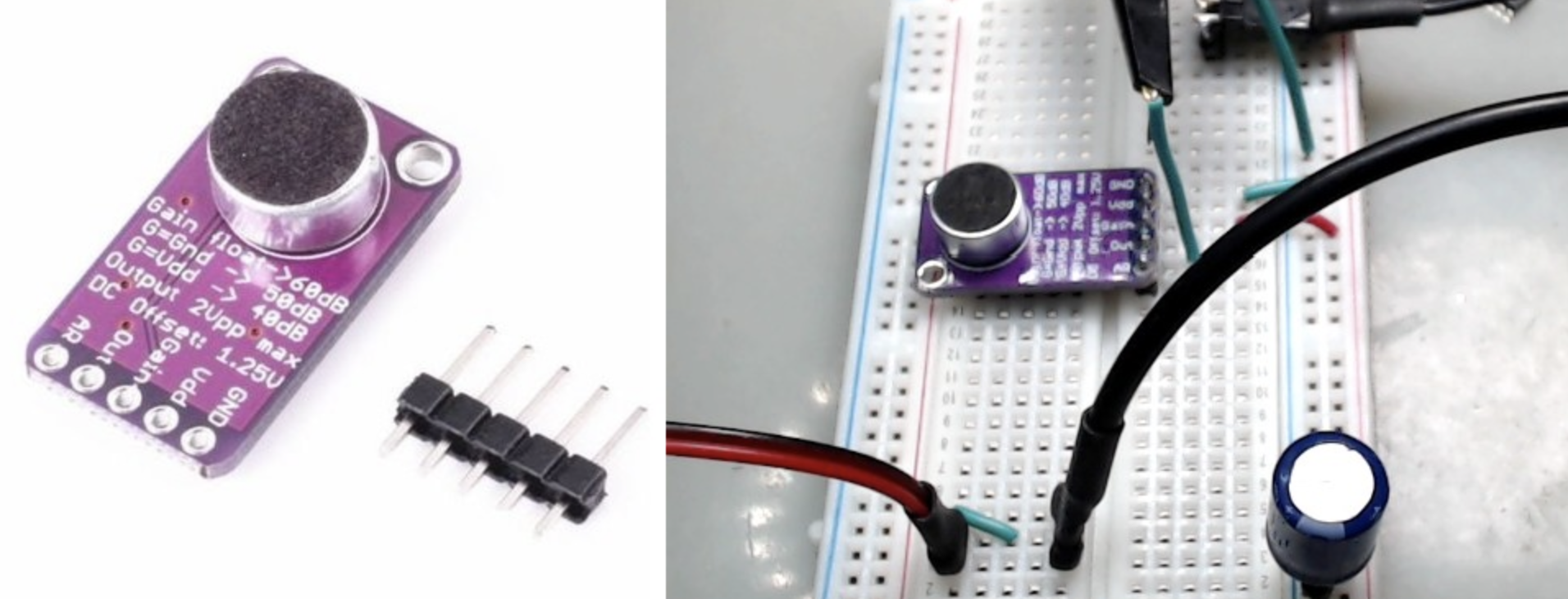
实验电路局部

典型工作特性

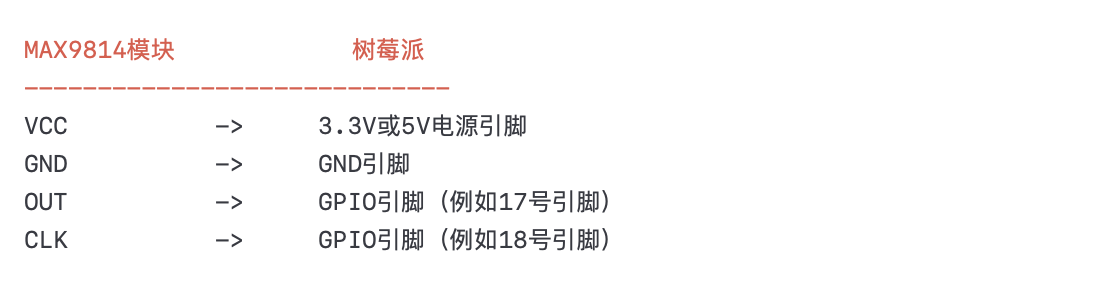
引角接线
代码展示
import RPi.GPIO as GPIO
# 定义GPIO引脚
DATAPIN = 17
CLKPIN = 18
def setup():
GPIO.setmode(GPIO.BCM)
GPIO.setup(CLKPIN, GPIO.OUT)
GPIO.setup(DATAPIN, GPIO.IN)
def read_mic():
# 发送启动信号
GPIO.output(CLKPIN, GPIO.LOW)
GPIO.output(CLKPIN, GPIO.HIGH)
GPIO.output(CLKPIN, GPIO.LOW)
# 读取12位的音频数据
data = 0
for _ in range(12):
GPIO.output(CLKPIN, GPIO.HIGH)
data = (data << 1) | GPIO.input(DATAPIN)
GPIO.output(CLKPIN, GPIO.LOW)
return data
def main():
setup()
while True:
mic_data = read_mic()
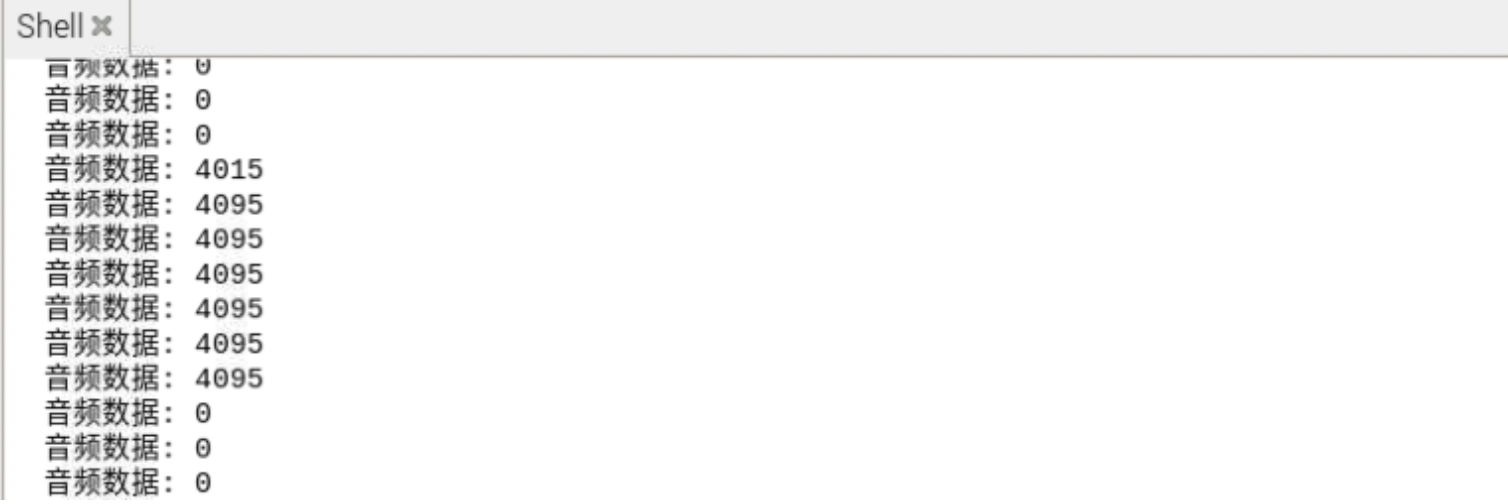
print("音频数据:", mic_data)
if __name__ == '__main__':
try:
main()
except KeyboardInterrupt:
GPIO.cleanup()
以上为基础代码,根据您的具体需求,您可能需要进行进一步的代码调整和优化。此外,请确保遵循适当的安全措施,并阅读MAX9814麦克风模块的数据手册以了解更多详细信息。
运行结果
树莓派4B-MAX9814麦克风模块的更多相关文章
- 树莓派4b点亮led灯基本步骤
方法/步骤1: 首先要了解树莓派上的针脚,下面以树莓派4b为例子 把LED的正极插在GPIO脚上,把负极插在GND上 这里的例子是:正极插在GPIO21 方法/步骤2: 创建脚本 在配置好的树莓派系统 ...
- 树莓派4B智能小车机器套件——入手组装实验记录
树莓派4B智能小车机器套件--入手组装实验记录 4WD智能小车(4WD SMART ROBOT KIT),支持Arduino.51.STM32.Raspberry Pi等4个版本.本套件采用的是树莓派 ...
- Linux学习 - 树莓派4b的U-Boot的初识
Linux学习 - 树莓派4b的U-Boot的初识 初识U-Boot 学习书籍:<[正点原子]I.MX6U嵌入式Linux驱动开发指南V1.5.1> 章节:第三十章 学习内容: 书中介绍u ...
- 树莓派4B安装64位Linux(不用显示器键盘鼠标)
入手了树莓派4B,我对它的定位是作为一个Docker实验环境,平时用到的镜像多为Java服务端常用的技术.以及自己作的Java应用镜像,因此宿主机需要64位操作系统,而树莓派官方操作系统只有32位的, ...
- 树莓派4B 安装CentOS
刚入手了一个树莓派4B替换掉旧的3B搭Nas.吐槽下3B的网卡和USB速度真的太慢. 虽然官方推荐的是Debina,由于习惯了CentOS不想增加学习成本,我还是决定用CentOS. 镜像下载地址:h ...
- 树莓派4B安装docker-compose(64位Linux)
准备工作 树莓派4B已装好64位Linux,并且装好了19.03.1版本的Docker,具体的安装步骤请参考<树莓派4B安装64位Linux(不用显示器键盘鼠标)> 安装docker-co ...
- 树莓派(4B)Linux + .Net Core嵌入式-初始化环境(一)
一.树莓派简单介绍 二.软&件准备 硬件:树莓派4B主机.电源线.TF卡&TF读卡器.PC 软件:win32diskimager(用于烧系统到TF卡).Xshell或Windows T ...
- 树莓派(4B)Linux + .Net Core嵌入式-HelloWorld(二)
一.新建.Net Core项目 新建.Net Core3.0的控制台应用,代码如下 namespace Demo { class Program { static void Main(string[] ...
- 读取树莓派4B处理器(CPU)的实时温度
读取树莓派4B处理器(CPU)的实时温度 树莓派发布4B后,性能提升了不少,但是温度也是高的不行,所以最好配置一个小风扇和散热片还是比较好的 俩种办法都可以实现 1.Shell命令读取 打开终端 cd ...
- 树莓派4B到货开箱体验
树莓派4B到货开箱体验 实不相瞒,喜欢这块板已经很久了,但是国内4GB内存的版本始终没货,.....等等等,终于到货了,迅雷不及眼耳之势赶紧下单...购买点亮开发板所需要的物件 顺便看到一个好看的外壳 ...
随机推荐
- Typora最后的免费版本0.11.18
Typora最后的免费版本为0.11.18. 之后的1.x开始收费. 免费版本0.11.18的百度网盘链接如下(永久链接): 链接:https://pan.baidu.com/s/1XizAD0SFp ...
- H.265码流解析
这一篇内容旨在对H.265码流中的一些概念做简单了解,部分概念与H.264相同,本篇中将不再重复. 1.NALU H.265(HEVC)码流的NALU结构和AVC有一些不同,属于增强版,HEVC NA ...
- 将任意程序安装成windows服务
某些时候,一个程序控制台服务程序需要在系统启动的时候自动运行,这时候我们会想到采用windows服务的方式来实现 但是,如果程序本来不支持安装成服务的话,我就需要采用其他方案来实现 之前博主也遇到了类 ...
- 《最新出炉》系列入门篇-Python+Playwright自动化测试-50-滚动条操作
1.简介 有些页面的内容不是打开页面时直接加载的,需要我们滚动页面,直到页面的位置显示在屏幕上时,才会去请求服务器,加载相关的内容,这就是我们常说的懒加载.还有就是在日常工作和学习中,经常会遇到我们的 ...
- iOS性能优化-内存泄漏
一.现象 最近直播助手在iOS11 ReplayKit上面经常出现进程使用内存超过50MB被系统杀掉,并且这种进程被杀掉不会有任何crash log留下来,只能在Console中留下一点消息. 二.使 ...
- 关于 ajax在前端提示SyntaxError: Unexpected end of JSON input
前几日,在开发微信公众号上的网页时候,前端采用h5+jquery开发,后端采用ASP.net的ashx接收前端的参数,restful采用的是java开发,由于在ASP.ENT的 webconfig中增 ...
- Python多线程、多进程编程
1 简介 参考:https://www.bilibili.com/video/BV1bK411A7tV?spm_id_from=333.999.0.0 python线程池ThreadPoolExecu ...
- Qt-数据库操作MySql
1 简介 参考视频:https://www.bilibili.com/video/BV1XW411x7NU?p=87 说明:本文简单说明在Qt中操作数据库,用MySql数据库进行试验. Qt 提供了 ...
- Python3基本语法(新)
目录 基本语法 输出print() 格式化输出 标识符 import关键字 保留字(关键字) 注释 多行注释 1.单引号(''') 2.双引号(""") 缩进 空行 同一 ...
- Java异常中throw 与throws的区别
throw 与 throws区别 在Java中,throws和throw是两个不同的关键字,它们在异常处理中起着不同的作用. throws关键字: throws用于声明一个方法可能会抛出的异常.当一个 ...