【论文阅读】IROS2021: PILOT: Efficient Planning by Imitation Learning and Optimisation for Safe Autonomous Driving
参考与前言
完整题目:PILOT: Efficient Planning by Imitation Learning and Optimisation for Safe Autonomous Driving
Summary: 用learning做warm start,然后使用优化进行求解,对比速度上有7倍的提升
Type: IROS
Year: 2021
cite: 3
tag: planning
组织/Sensor: oxford, edinburgh
论文链接:https://arxiv.org/abs/2011.00509;https://ieeexplore.ieee.org/abstract/document/9636862
代码链接:无
pre视频: https://www.youtube.com/watch?v=jK5oUhnJ7xw
同组同一批作者:TRO two-stage论文 主要基于这篇时间问题给出的一种方案;
- 博客园 TRO2022: A Two-Stage Optimization-Based Motion Planner for Safe Urban Driving
- CSDN TRO2022: A Two-Stage Optimization-Based Motion Planner for Safe Urban Driving
1. Motivation
本文主要是想吸收这data-driven和model-based 各自优点,做到efficiency
问题场景
总结 motion planning 可以划分为两类:data-driven 和 model-based;inference in data-driven model对比与其他的传统搜索和优化算法通常也更有效;而model-based 具有更多可解释性,而这些以robustness和runtime为代价
Contribution
A robust and scalable framework that imitates an expensive-to-run optimizer
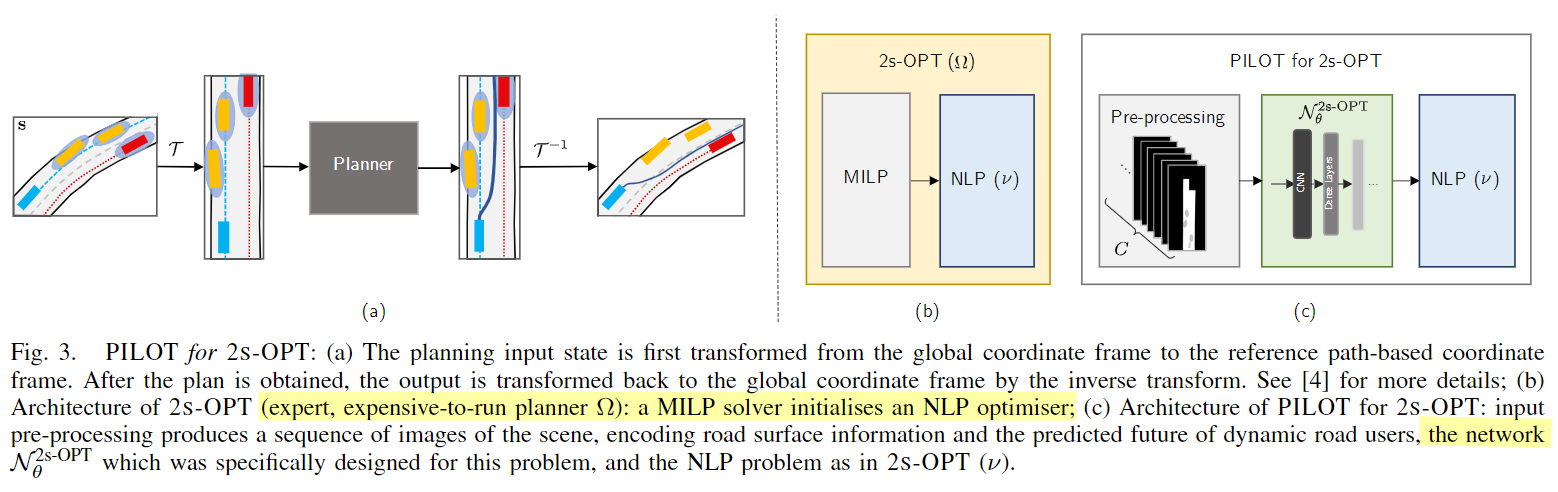
Applying this framework to the two-stage optimization based planner
此点主要是速度上的提升,比上次转成MILP问题进行warm,快了7倍的时间
2. Method
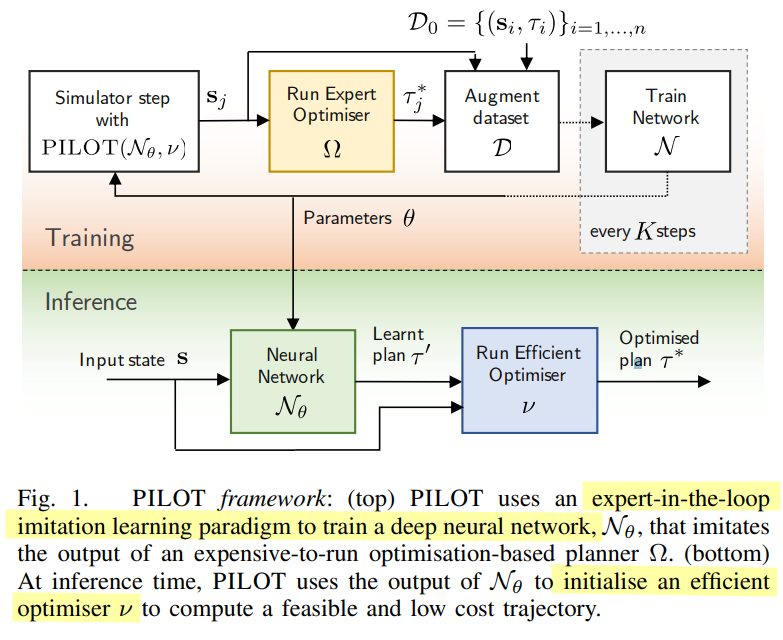
提出:planning by imitation learning and optimization
- 使用模仿学习提取expert planner的行为,在线的,expert in the loop dataset augmentation(比如DAgger Dataset Aggregation 18)去持续的丰富整个训练集
- inference time 则是使用network做warm start,然后送到优化问题里进行求解
2.1 框架
2.2 网络设计
之所以直接进入了网络设计 是因为… 优化的部分在上一篇TRO2022 two-stage进行了详细说明,此部分主要就是如何让网络得到一个warm start以得到一个更为 高效的求解系统
网络框架:
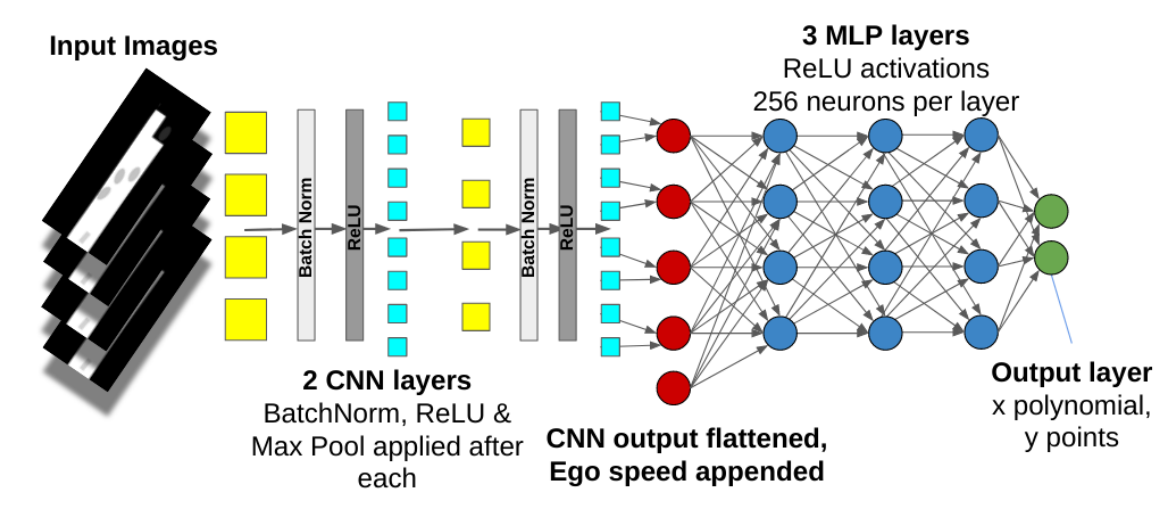
loss设计,期望网络能输出以参考线为坐标轴的一系列轨迹,encoded成一系列向量 \(\rho^{\theta}=\left\{\left(x_{j}, y_{j}\right)\right\}_{j=1, \ldots, N} \in \mathbb{R}^{2 \times N} \text {. }\)loss则是他和expert轨迹的L2 norm,其中 \(\theta\) 为神经网络的参数,D为训练数据,\(\mu\)为正则化参数
\]
2.3 Cost定义
其中和实验表里cost的定义为:
\]
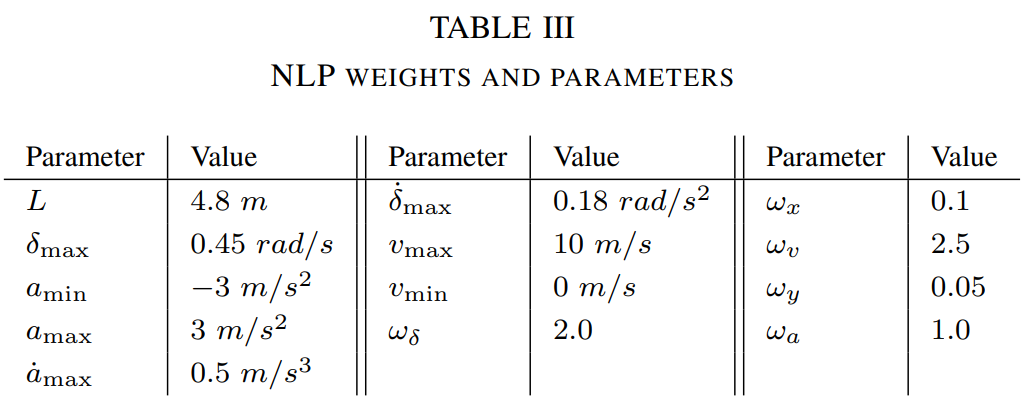
w为权重,\(\theta\) 为速度,reference path,终点位置,控制量:加速度和转向 分别对应公式为: \(\omega_v, \omega_y, \omega_x, \omega_a, \omega_{δ}\) 权重经过了作者的调整
相关参数为如此表:
3. 实验及结果
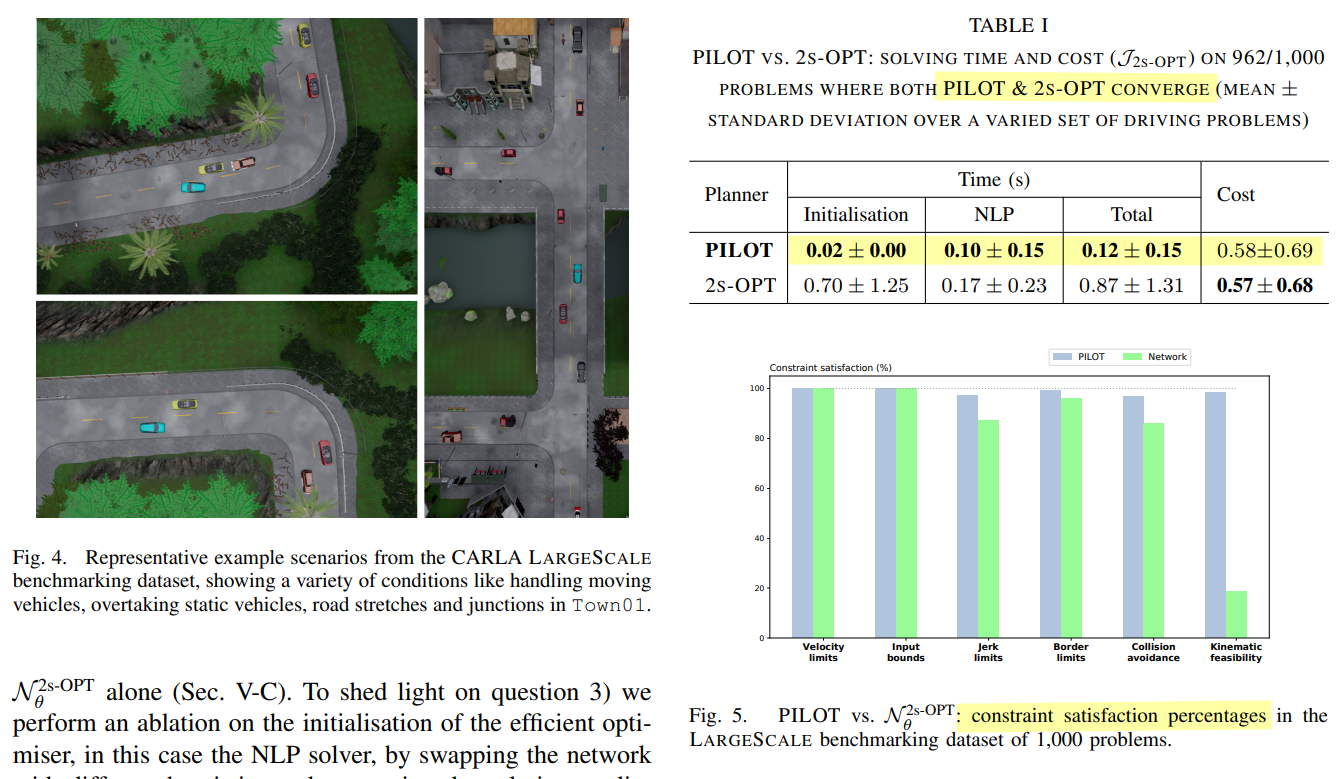

可以看出对比之前2s-OPT来说在提高了速度的面前,仅一点点 求解质量的牺牲,同时对比MILP问题给的初解,虽然converged不比MILP问题,但是对比其他情况下已经是最高的了
None对应无论何时求解都讲车辆状态(包括位置,yaw,速度设为0);ConstVel, Accel, Decel 分别对应初始化时的状态为恒定速度,加速度、减速度等
4. Conclusion
现在就是意义上的做到了求解质量高,也可以达到实时性要求,其中主要和TRO 2s-OPT进行了联动对比(都是同一个作者走的,应该是同一个时间点 那个做完了就开始尝试,网络去学出给初解
在discussion部分,作者说未来的方向可以探索更高级的转接,使用initializations [33]以更小cost给出solution;同时看看其他的损失函数的加入,提高网络提供的初始化质量和弥补专家与优化器之间现有的差距(其实差距不大…)
碎碎念
JG说… 其实这种用神经网络给初解的想法很多,但是怎样给出这个expert很难,所以主要贡献其实还是在expert,或者主要效果还是由expert的好坏决定的
赠人点赞 手有余香 ;正向反馈 才能更好开放记录
【论文阅读】IROS2021: PILOT: Efficient Planning by Imitation Learning and Optimisation for Safe Autonomous Driving的更多相关文章
- 论文阅读:Deep Attentive Tracking via Reciprocative Learning
Deep Attentive Tracking via Reciprocative Learning 2018-11-14 13:30:36 Paper: https://arxiv.org/abs/ ...
- 【论文阅读】MEAL: Multi-Model Ensemble via Adversarial Learning
转载请注明出处:https://www.cnblogs.com/White-xzx/ 原文地址:https://arxiv.org/abs/1812.02425 Github: https://git ...
- 【CV论文阅读】An elegant solution for subspace learning
Pre: It is MY first time to see quite elegant a solution to seek a subspace for a group of local fea ...
- 论文阅读 | BadNets: Identifying Vulnerabilities in the Machine Learning Model Supply Chain
BadNets: 识别机器学习模型供应链中的漏洞 摘要 基于深度学习的技术已经在各种各样的识别和分类任务上取得了最先进的性能.然而,这些网络通常训练起来非常昂贵,需要在许多gpu上进行数周的计算;因此 ...
- [置顶]
人工智能(深度学习)加速芯片论文阅读笔记 (已添加ISSCC17,FPGA17...ISCA17...)
这是一个导读,可以快速找到我记录的关于人工智能(深度学习)加速芯片论文阅读笔记. ISSCC 2017 Session14 Deep Learning Processors: ISSCC 2017关于 ...
- 【论文阅读】Learning Dual Convolutional Neural Networks for Low-Level Vision
论文阅读([CVPR2018]Jinshan Pan - Learning Dual Convolutional Neural Networks for Low-Level Vision) 本文针对低 ...
- 论文阅读:《Bag of Tricks for Efficient Text Classification》
论文阅读:<Bag of Tricks for Efficient Text Classification> 2018-04-25 11:22:29 卓寿杰_SoulJoy 阅读数 954 ...
- 【论文阅读】PRM-RL Long-range Robotic Navigation Tasks by Combining Reinforcement Learning and Sampling-based Planning
目录 摘要部分: I. Introduction II. Related Work III. Method **IMPORTANT PART A. RL agent training [第一步] B. ...
- 【论文阅读】Motion Planning through policy search
想着CSDN还是不适合做论文类的笔记,那里就当做技术/系统笔记区,博客园就专心搞看论文的笔记和一些想法好了,[]以后中框号中间的都算作是自己的内心OS 有时候可能是问题,有时候可能是自问自答,毕竟是笔 ...
- [论文阅读] MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications (MobileNet)
论文地址:MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications 本文提出的模型叫Mobi ...
随机推荐
- docker-compose 安装 mysql:5.7.31
目录 一.新建一个启动服务的目录 二.新建文件docker-compose.yml 三.新建角本文件 init-mysql.sh 四.实使化目录和配置文件 启动服务 登陆mysql 其它操作 参考文档 ...
- Splashtop 免费60天 大赠送
这两天又是双11,又是 EDG 夺冠,可谓喜事连连.热闹不断.我们也给大家准备了一份长达两个月的免费福利,快乐加倍嗷. 福利详情: 1.分享这篇文章(不要设置分组可见). 2.发送您的 Splasht ...
- java学习之旅(day.01)
Markdown学习 标题 一级标题:#空格+标题名字 二级标题:##空格+标题名字 三级标题:###空格+标题名字 字体 粗体:两边都加两个** Hello,world 斜体:两边都加一个* Hel ...
- Gitea 代码仓库平台
引言 Gitea 是一个自己托管的 Git 服务程序.他和 GitHub,Bitbucket or Gitlab 等比较类似.它是从 Gogs 发展而来,不过它已经 Fork 并且命名为 Gitea. ...
- Django模型层的QuerySet对象
def index(request): # 查询数据,返回QuerySet对象books books=Book.objects.filter(id__gte=1) # 打印books, 是一个Quer ...
- .NET Core 项目Linux环境下生成二维码
问题: 公司系统开发中,需要对企微授权链接进行二维码生成,然后向客户提供:当然,首当其冲想到的是使用ZXing.NET库进行实现,毕竟生成简单二维码也就那几句代码:然而,在本地环境中,一切都很正常,但 ...
- ALL IN AI | 第六届金蝶云·苍穹追光者开发大赛正式启动报名!
2024年5月,第六届金蝶云·苍穹追光者开发大赛x第十三届"中国软件杯"金蝶赛道正式启动报名! 当下,人工智能正以其空前的速度.广度和深度,引领着新一轮科技革命和产业变革,重塑着经 ...
- kubernetes自动扩缩容[HPA控制器 horizontal pod autoscaler]
kubernetes自动扩缩容[HPA控制器 horizontal pod autoscaler] #查看当前hpa控制器版本: [root@k8s-master01 ~]# kubectl get ...
- 记录工作中常用的 JS 数组相关操作
工作中难免会遇到各种各样的数据结构,较为全面的了解数组操作,对于复杂数据结构的处理会非常有用且节省时间 所以想在这里总结一下工作中常用的数组操作,都是一些非常基础的知识,大家看个乐就好~ 目录 工作中 ...
- LeetCode 449. Serialize and Deserialize BST 序列化和反序列化二叉搜索树 (Java)
题目: Serialization is the process of converting a data structure or object into a sequence of bits so ...