软光栅-uraster代码阅读(入门极品)
软光栅-uraster代码阅读(入门极品)
代码链接:https://github.com/Steve132/uraster
所有的代码都在uraster.hpp中。代码非常简单,适合初学者学习软光栅的实现。整个代码,在理解渲染管线基本流程的基础上,很容易理解,因此首先对渲染管线的基本流程进行介绍。
渲染管线流程介绍
详细内容可以参见:games101第5节课,和第6节课。
课程地址见:http://games-cn.org/intro-graphics/
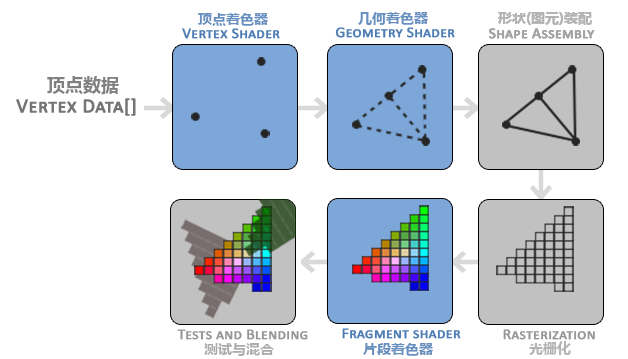
上图取自https://learnopengl-cn.github.io/01%20Getting%20started/04%20Hello%20Triangle/。
此处重点关注:顶点数据、顶点着色器、光栅化、片段着色器。
作为输入的数据往往是三维顶点数据,这些顶点数据经过vertex shader,进行模型变换,视图变换,透镜变换,顶点的坐标会变成规范化后的坐标(-1,1)。结合最终图像的宽高就能够确定之前的三维上的点在二维上对应的位置。由于图像是由像素组成,是离散的。因此将连续的模型绘制到图像上的时候,需要进行光栅化的过程。光栅化之后,对每个光栅化的位置进行着色。
接下来重点介绍下如何进行光栅化。很容易想到可以利用采样的方式进行。如下图所示(from games 101):
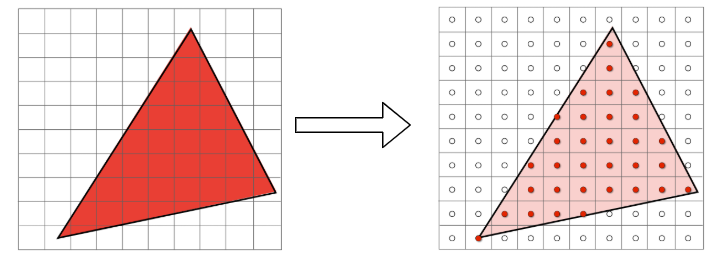
for (int i=0; i<width; ++i)
for (int j=0; j<height; ++j)
buffer[i,j] = f(i,j)
那么现在的重点就是,如何判断一个点是否位于三角形内部。
判断点是否在三角形内(1)
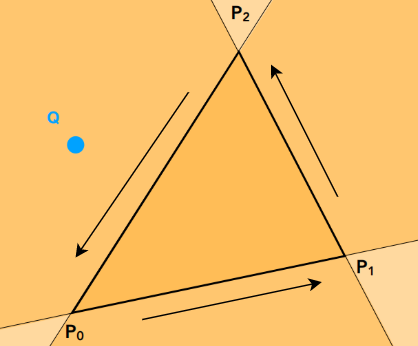
假如一个点在P1P2,P2P0,P0P1向量的同一边,那么点就在三角形内部,否则在三角形外部。
判断点是否在三角形内(2)
利用三角形的重心进行判断,三角形的重心是三角形三条中线的交点。如果有个一点满足如下性质:
\(aP_0 + bP_1 + cP_2 = P_c, \ a + b + c = 1, \ a \ge 0,b\ge 0, c\ge 0\)
那么点Pc就在三角形内部。
uraster代码浏览
主要包括如下组成成分:
// 数据结构,类型
class Framebuffer; // 用来存储绘制的结果,内部就是个vector
struct BarycentricTransform; // functor 用来辅助计算重心坐标
// 函数
void run_vertex_shader(...); // 用来执行外部传入进来的顶点着色器函数,用来进行模型视图投影变换,以及颜色设置
void rasterize_triangle(...); // 用来对三角形进行光栅化操作
void rasterize(...); // 光栅化的总入口
void draw(...); // 渲染操作的总入口
是不是很简单,作为入门材料实在是太合适了。从入口开始往后看,先看一下draw:
/// \param fb 用来存绘制结果
/// \param vertexbuffer_b 顶点存储空间开始的位置
/// \param vertexbuffer_e 顶点存储空间结束的位置
/// \param indexbuffer_b 索引存储空间开始的位置
/// \param indexbuffer_e 索引存储空间结束的位置
/// \param vcache_b vcache_e 存储顶点着色器之后的结果
/// \param vertex_shader 顶点着色器functor
/// \param fragment_shader 片段着色器functor
template<class PixelOut,class VertexVsOut,class VertexVsIn,class VertShader, class FragShader>
void draw(Framebuffer<PixelOut>& fb,
const VertexVsIn* vertexbuffer_b,const VertexVsIn* vertexbuffer_e,
const std::size_t* indexbuffer_b,const std::size_t* indexbuffer_e,
VertexVsOut* vcache_b,VertexVsOut* vcache_e,
VertShader vertex_shader,
FragShader fragment_shader)
{
std::unique_ptr<VertexVsOut[]> vc;
// 确保vcache_b的输出大小和顶点存储空间的大小一致
if(vcache_b==NULL || (vcache_e-vcache_b) != (vertexbuffer_e-vertexbuffer_b))
{
vcache_b=new VertexVsOut[(vertexbuffer_e-vertexbuffer_b)];
vc.reset(vcache_b);
}
// 运行顶点着色器
run_vertex_shader(vertexbuffer_b,vertexbuffer_e,vcache_b,vertex_shader);
// 运行光栅化
rasterize(fb,indexbuffer_b,indexbuffer_e,vcache_b,fragment_shader);
}
主要看一下三角形光栅化的过程:
/// \brief 输入三角形的三个顶点,进行光栅化,并对每个位置利用片段着色器进行着色
template<class PixelOut,class VertexVsOut,class FragShader>
void rasterize_triangle(Framebuffer<PixelOut>& fb,const std::array<VertexVsOut,3>& verts,FragShader fragment_shader)
{
std::array<Eigen::Vector4f,3> points{{verts[0].position(),verts[1].position(),verts[2].position()}};
// 除以w项,将齐次坐标系转换成标准化的坐标系(-1,1)
std::array<Eigen::Vector4f,3> epoints{{points[0]/points[0][3],points[1]/points[1][3],points[2]/points[2][3]}};
// 获取xy位置
auto ss1=epoints[0].head<2>().array(),ss2=epoints[1].head<2>().array(),ss3=epoints[2].head<2>().array();
// 计算xy平面上的包围矩形
Eigen::Array2f bb_ul=ss1.min(ss2).min(ss3);
Eigen::Array2f bb_lr=ss1.max(ss2).max(ss3);
Eigen::Array2i isz(fb.width,fb.height);
//将坐标映射为图像大小 (-1.0,1.0)->(0,imgdim)
Eigen::Array2i ibb_ul=((bb_ul*0.5f+0.5f)*isz.cast<float>()).cast<int>();
Eigen::Array2i ibb_lr=((bb_lr*0.5f+0.5f)*isz.cast<float>()).cast<int>();
ibb_lr+=1; //add one pixel of coverage
//clamp the bounding box to the framebuffer size if necessary (this is clipping. Not quite how the GPU actually does it but same effect sorta).
// 在结合图像区域,限定包围矩形
ibb_ul=ibb_ul.max(Eigen::Array2i(0,0));
ibb_lr=ibb_lr.min(isz);
// 初始化重心坐标计算类
BarycentricTransform bt(ss1.matrix(),ss2.matrix(),ss3.matrix());
//for all the pixels in the bounding box
for(int y=ibb_ul[1];y<ibb_lr[1];y++)
for(int x=ibb_ul[0];x<ibb_lr[0];x++)
{
// 转换成-1到1的范围
Eigen::Vector2f ssc(x,y);
ssc.array()/=isz.cast<float>(); //move pixel to relative coordinates
ssc.array()-=0.5f;
ssc.array()*=2.0f;
//Compute barycentric coordinates of the pixel center
// 计算重心坐标
Eigen::Vector3f bary=bt(ssc);
//if the pixel has valid barycentric coordinates, the pixel is in the triangle
// 重心坐标需要在0到1的范围内,点踩在三角形的范围内
if((bary.array() < 1.0f).all() && (bary.array() > 0.0f).all())
{
// 计算这个点的深度信息
float d=bary[0]*epoints[0][2]+bary[1]*epoints[1][2]+bary[2]*epoints[2][2];
//Reference the current pixel at that coordinate
PixelOut& po=fb(x,y);
// if the interpolated depth passes the depth test
// 进行深度测试
if(po.depth() < d && d < 1.0)
{
// 计算当前点
//interpolate varying parameters
VertexVsOut v=verts[0];
v*=bary[0];
VertexVsOut vt=verts[1];
vt*=bary[1];
v+=vt;
vt=verts[2];
vt*=bary[2];
v+=vt;
//call the fragment shader
po=fragment_shader(v);
po.depth()=d; //write the depth buffer
}
}
}
}
接着来看一下使用的时候需要注意什么:
struct XXXVertVsOut // 以下几个函数是必须的
{
const Eigen::Vector4f& position() const;
BunnyVertVsOut& operator+=(const BunnyVertVsOut& tp);
BunnyVertVsOut& operator*(const float& f);
};
class XXXPixel
{
public:
float& depth(); // 该函数也是必须的
};
放上示例程序跑出来的结果:
软光栅-uraster代码阅读(入门极品)的更多相关文章
- 用 windows GDI 实现软光栅化渲染器--gdi3d(开源)
尝试用windows GDI实现了一个简单的软光栅化渲染器,把OpenGL渲染管线实现了一遍,还是挺有收获的,搞清了以前一些似是而非的疑惑. ----更新2015-10-16代码已上传.gihub地址 ...
- 开源一个简单的c++软光栅渲染器
本文由zhangbaochong原创,转载请注明出处http://www.cnblogs.com/zhangbaochong/p/5751111.html 由于开学就大四面临找工作了,为了整理下项目, ...
- [2019BUAA软工助教]第一次阅读 - 小结
[2019BUAA软工助教]第一次阅读 - 小结 一.评分规则 总分 16 分,附加 2 分,共 18 分 markdown格式统一且正确 - 2分 不统一:扣 1 分 不正确:扣 1 分(例如使用代 ...
- 代码阅读分析工具Understand 2.0试用
Understand 2.0是一款源代码阅读分析软件,功能强大.试用过一段时间后,感觉相当不错,确实可以大大提高代码阅读效率.由于Understand功能十分强大,本文不可能详尽地介绍它的所有功能,所 ...
- Android 上的代码阅读器 CoderBrowserHD 修改支持 go 语言代码
我在Android上的代码阅读器用的是 https://github.com/zerob13/CoderBrowserHD 改造的版本,改造后的版本我放在 https://github.com/ghj ...
- Linux协议栈代码阅读笔记(二)网络接口的配置
Linux协议栈代码阅读笔记(二)网络接口的配置 (基于linux-2.6.11) (一)用户态通过C库函数ioctl进行网络接口的配置 例如,知名的ifconfig程序,就是通过C库函数sys_io ...
- [置顶] Linux协议栈代码阅读笔记(一)
Linux协议栈代码阅读笔记(一) (基于linux-2.6.21.7) (一)用户态通过诸如下面的C库函数访问协议栈服务 int socket(int domain, int type, int p ...
- 图形化代码阅读工具——Scitools Understand
Scitools出品的Understand 2.0.用了很多年了,比Source Insight强大很多.以前的名字叫Understand for C/C++,Understand for Java, ...
- Python - 关于代码阅读的一些建议
初始能力 让阅读思路保持清晰连贯,主力关注在流程架构和逻辑实现上,不被语法.技巧和业务流程等频繁地阻碍和打断. 建议基本满足以下条件,再开始进行代码阅读: 具备一定的语言基础:熟悉基础语法,常用的函数 ...
随机推荐
- xtrabackup手册笔记
http://www.cnblogs.com/Amaranthus/archive/2014/08/19/3922570.html#_Toc396231219
- CF #459 D. MADMAX
D. MADMAX time limit per test 1 second memory limit per test 256 megabytes input standard input outp ...
- 【Java_SSM】(三)maven中的配置文件setting的配置
这篇博文我们介绍两方面:如何修改setting.xml文件及相应配置(本文maven版本为3.5.0) (1)首先打开maven文件目录--conf,会看见如下目录 (2)复制setting.xml文 ...
- 六、表达式:前缀&&后缀
count为运算后的值.
- Spring Boot 教程(1) - HelloWorld
Spring Boot 教程 - HelloWorld 1. Spring Boot 的由来 大家都知道,Spring框架是Java生态中举足轻重的轻量型框架,帮助我们广大的大佬们进行Java开发.S ...
- 新来的老大,剑走偏锋,干掉AOP做操作日志,实现后我们都惊呆了
前言 用户在操作我们系统的过程中,针对一些重要的业务数据进行增删改查的时候,我们希望记录一下用户的操作行为,以便发生问题时能及时的找到依据,这种日志就是业务系统的操作日志. 本篇我们来探讨下常见操作日 ...
- vue采用history路由的服务器部署问题
发现部署问题 在部署的时候发现打开的页面是空白 之前部署原理 之前的页面都是作为静态文件形式打包上传到服务器上 http://www.xiedashuaige.cn/bolg2.0/#/home 就和 ...
- [Unity2d系列教程] 005.Unity如何使用外部触控插件FingerGuesture
用过Unity的都知道自带的Input.touches并不支持鼠标输入,给我们的调试带来很大的不方便.那么我们会发现其实有很多触控方面的插件,如inputtouches,easy touch,fing ...
- [JavaWeb基础] 003.JAVA访问Mysql数据库
上面两篇讲解了简单的JSP + Servlet的搭建和请求,那么后面我们肯定要用到数据交互,也就是操纵数据库的数据,包括对数字的增加,删除,修改,查询.我们就用简单的MySql来做例子 我们需要引入驱 ...
- Cypress系列(4)- 解析 Cypress 的默认文件结构
如果想从头学起Cypress,可以看下面的系列文章哦 https://www.cnblogs.com/poloyy/category/1768839.html 默认文件结构 在使用 cypress o ...