STM32F4 -- How to use the DMA burst feature
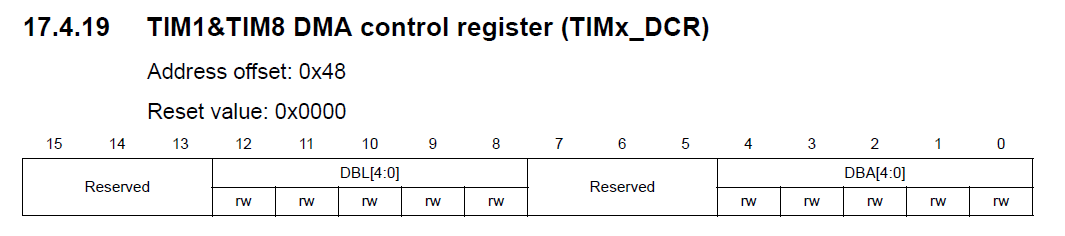
Bits 15:13 Reserved, must be kept at reset value.
Bits 12:8 DBL[4:0]: DMA burst length
This 5-bit vector defines the number of DMA transfers
(the timer detects a burst transfer when a read or a write access to the TIMx_DMAR register address is performed).
- 00000: 1 transfer
- 00001: 2 transfers
- 00010: 3 transfers
- ...
- 10001: 18 transfers
Bits 7:5 Reserved, must be kept at reset value.
Bits 4:0 DBA[4:0]: DMA base address
This 5-bits vector defines the base-address for DMA transfers (when read/write access are done through the TIMx_DMAR address).
DBA is defined as an offset starting from the address of the TIMx_CR1 register.
Example:
- 00000: TIMx_CR1,
- 00001: TIMx_CR2,
- 00010: TIMx_SMCR,
...

Example: Let us consider the following transfer: DBL = 7 transfers and DBA = TIMx_CR1.
In this case the transfer is done to/from 7 registers starting from the TIMx_CR1 address.

Bits 15:0 DMAB[15:0]: DMA register for burst accesses
A read or write operation to the DMAR register accesses the register located at the address
(TIMx_CR1 address) + (DBA + DMA index) x 4
DBA is defined as an offset starting from the address of the TIMx_CR1 register.
where TIMx_CR1 address is the address of the control register 1,
DBA is the DMA base address configured in TIMx_DCR register,
DMA index is automatically controlled by the DMA transfer,
and ranges from 0 to DBL (DBL configured in TIMx_DCR).
DBL This 5-bit vector defines the number of DMA transfers
Example of how to use the DMA burst feature
In this example the timer DMA burst feature is used to update the contents of the CCRx registers (x = 2, 3, 4)
with the DMA transferring half words into the CCRx registers.
This is done in the following steps:
1. Configure the corresponding DMA channel as follows:
– DMA channel peripheral address is the DMAR register address
– DMA channel memory address is the address of the buffer in the RAM
containing the data to be transferred by DMA into CCRx registers.
– Number of data to transfer = 3 (See note below).: CCR2, CCR3, CCR4
– Circular mode disabled.
2. Configure the DCR register by configuring the DBA and DBL bit fields as follows:
DBL = 3 transfers, DBA = 0xE. :: 4 * 0x0E = 0x38
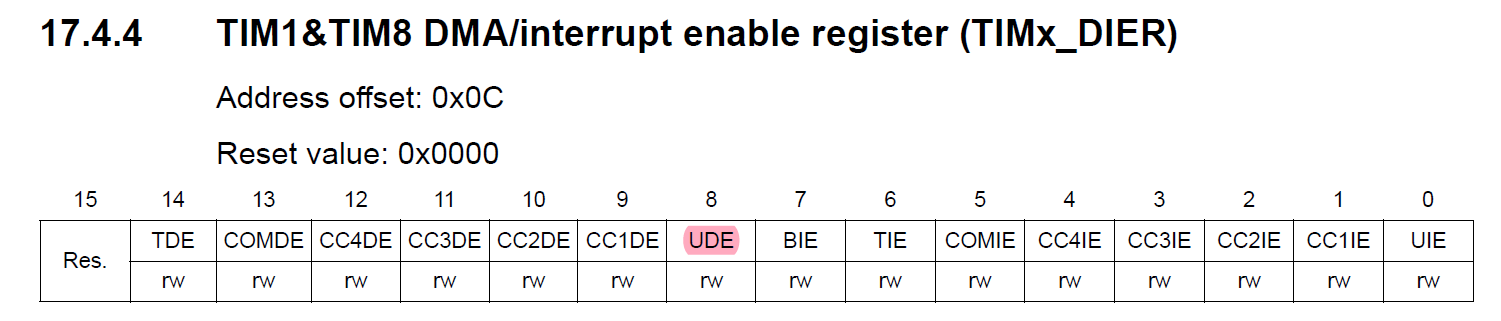
3. Enable the TIMx update DMA request (set the UDE bit in the DIER register).
4. Enable TIMx
5. Enable the DMA channel
Note:
This example is for the case where every CCRx register to be updated once.
Let's take the example of a buffer in the RAM containing data1, data2, data3.
The data is transferred to the CCRx registers as follows:
on the update DMA request, data1 is transferred to CCR2, data2 is transferred to CCR3, data3 is transferred to CCR4 and
If every CCRx register is to be updated twice for example, the number of data to transfer should be 6 -- DMA
NumberOfTransfer = UpdateTimes * DMA burst length<DBL>.
Let's take the example of a buffer in the RAM containing data1, data2, data3, data4, data5 and data6.
The data is transferred to the CCRx registers as follows:
on the first update DMA request, data1 is transferred to CCR2, data2 is transferred to CCR3, data3 is transferred to CCR4 and
on the second update DMA request, data4 is transferred to CCR2, data5 is transferred to CCR3 and data6 is transferred to CCR4.
/**
******************************************************************************
* @file TIM/TIM_DMABurst/main.c
* @author MCD Application Team
* @version V1.1.0
* @date 18-January-2013
* @brief Main program body
******************************************************************************
* @attention
*
* <h2><center>© COPYRIGHT 2013 STMicroelectronics</center></h2>
*
* Licensed under MCD-ST Liberty SW License Agreement V2, (the "License");
* You may not use this file except in compliance with the License.
* You may obtain a copy of the License at:
*
* http://www.st.com/software_license_agreement_liberty_v2
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*
******************************************************************************
*/ /* Includes ------------------------------------------------------------------*/
#include "main.h" /** @addtogroup STM32F4xx_StdPeriph_Examples
* @{
*/ /** @addtogroup TIM_DMABurst
* @{
*/ /* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
#define TIM1_DMAR_ADDRESS ((uint32_t)0x4001004C) /* TIM DMAR address */ /* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
GPIO_InitTypeDef GPIO_InitStructure;
DMA_InitTypeDef DMA_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure; uint16_t aSRC_Buffer[] = {0x0FFF, 0x0000, 0x0555}; // APR, RCR, CCR1 /* Private function prototypes -----------------------------------------------*/
static void TIM_Config(void); /* Private functions ---------------------------------------------------------*/ /**
* @brief Main program
* @param None
* @retval None
*/
int main(void)
{
/*!< At this stage the microcontroller clock setting is already configured,
this is done through SystemInit() function which is called from startup
files (startup_stm32f40xx.s/startup_stm32f427x.s) before to branch to
application main.
To reconfigure the default setting of SystemInit() function, refer to
system_stm32f4xx.c file
*/ /* TIM1 Configuration */
TIM_Config(); /* Time base configuration */
/* -----------------------------------------------------------------------
TIM1 Configuration: generate 1 PWM signal using the DMA burst mode: TIM1 input clock (TIM1CLK) is set to 2 * APB2 clock (PCLK2), since APB2 prescaler is different from 1.
TIM1CLK = 2 * PCLK2, PCLK2 = HCLK / 2 => TIM1CLK = 2 * (HCLK / 2) = HCLK = SystemCoreClock To get TIM1 counter clock at 24 MHz, the prescaler is computed as follows:
Prescaler = (TIM1CLK / TIM1 counter clock) - 1
Prescaler = (SystemCoreClock /24 MHz) - 1 The TIM1 period is 5.8 KHz:
TIM1 Frequency = TIM1 counter clock/(ARR + 1) = 24 MHz / 4096 = 5.85 KHz
TIM1 Channel1 duty cycle = (TIM1_CCR1/ TIM1_ARR)* 100 = 33.33% Note:
SystemCoreClock variable holds HCLK frequency and is defined in system_stm32f4xx.c file.
Each time the core clock (HCLK) changes, user had to call SystemCoreClockUpdate()
function to update SystemCoreClock variable value. Otherwise, any configuration
based on this variable will be incorrect.
----------------------------------------------------------------------- */
TIM_TimeBaseStructure.TIM_Period = 0xFFFF;
TIM_TimeBaseStructure.TIM_Prescaler = (uint16_t) (SystemCoreClock / ) - ;
TIM_TimeBaseStructure.TIM_ClockDivision = 0x0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); /* TIM Configuration in PWM Mode */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0xFFF;
TIM_OC1Init(TIM1, &TIM_OCInitStructure); /* TIM1 DMAR Base register and DMA Burst Length Config */
TIM_DMAConfig(TIM1, TIM_DMABase_ARR, TIM_DMABurstLength_3Transfers); // APR, RCR, CCR1 /* TIM1 DMA Update enable */
TIM_DMACmd(TIM1, TIM_DMA_Update, ENABLE); /* TIM1 enable */
TIM_Cmd(TIM1, ENABLE); /* TIM1 PWM Outputs Enable */
TIM_CtrlPWMOutputs(TIM1, ENABLE); /* Enable DMA2 Stream5 */
DMA_Cmd(DMA2_Stream5, ENABLE); /* Wait until DMA2 Stream5 end of Transfer */
while (!DMA_GetFlagStatus(DMA2_Stream5, DMA_FLAG_TCIF5))
{
} /* Infinite loop */
while()
{
}
} /**
* @brief Configure the TIM1 Pins.
* @param None
* @retval None
*/
static void TIM_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure; /* TIM1 clock enable */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); /* GPIOA clock enable */
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); /* DMA2 clock enable */
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_DMA2, ENABLE); /* GPIOA Configuration: PA8(TIM1 CH1) as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOA, &GPIO_InitStructure); /* Connect TIM pins to AF1 */
GPIO_PinAFConfig(GPIOA, GPIO_PinSource8, GPIO_AF_TIM1); /* DeInitialize the DMA2 Stream5 */
DMA_DeInit(DMA2_Stream5); DMA_InitStructure.DMA_Channel = DMA_Channel_6; // TIM1_UP : DMA2_Stream5
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)TIM1_DMAR_ADDRESS;
DMA_InitStructure.DMA_Memory0BaseAddr = (uint32_t)aSRC_Buffer;
DMA_InitStructure.DMA_DIR = DMA_DIR_MemoryToPeripheral;
DMA_InitStructure.DMA_BufferSize = ;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
DMA_InitStructure.DMA_Priority = DMA_Priority_VeryHigh;
DMA_InitStructure.DMA_FIFOMode = DMA_FIFOMode_Enable;
DMA_InitStructure.DMA_FIFOThreshold = DMA_FIFOThreshold_Full;
DMA_InitStructure.DMA_MemoryBurst = DMA_MemoryBurst_Single;
DMA_InitStructure.DMA_PeripheralBurst = DMA_PeripheralBurst_Single;
DMA_Init(DMA2_Stream5, &DMA_InitStructure);
} #ifdef USE_FULL_ASSERT /**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ while ()
{}
}
#endif /**
* @}
*/ /**
* @}
*/ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
STM32F4 -- How to use the DMA burst feature的更多相关文章
- PCI总线 DMA burst 基本概念
转载地址:http://blog.csdn.net/sunjiajiang/article/details/7945057 DMA和burst不是一个概念. DMA传送不经过CPU的控制,假如硬盘的数 ...
- 嵌入式开发之hi3519---PCIE DMA
http://blog.csdn.net/abcamus/article/details/76167747 大话pcie dma http://blog.csdn.net/qingfengtsing/ ...
- LCD framebuffer驱动设计文档
内容提要:1. android display相关的名词2. 调试LCD驱动需要注意的步骤3. 关于帧缓冲区及I/O内存---------------------------------------- ...
- stm32之内部功能
本文将提到以下内容: 位带操作 中断 printf重定向 随机数发生器RNG AD/DA DMA 高性能计算能力 加密 ART加速 一.位带操作 在学习51单片机的时候就使用过位操作,通过关键字sbi ...
- s3c2410 cs8900a 网卡驱动程序
/* CS8900a.h */ #define CONFIG_CERF_CS8900A 1 /* * cs8900a.c: A Crystal Semiconductor (Now Cirrus Lo ...
- [转]理解下DMA/NorFlash/DDR下的Burst是个什么概念
DMA传送不经过CPU的控制,假如硬盘的数据不能经过DMA控制器读到内存,那么每完成一次将硬盘的数据读出来,再存放到内存的操作,都要通过CPU运行几条读写指令来完成,这时CPU就做不了别的事了,如果有 ...
- STM32F4 SPI with DMA
STM32F4 SPI with DMA A few people have requested code, so I thought I’d post the code showing how I’ ...
- stm32f4 dma + uart idle + double 调试小记
使用 stm32f4 调试uart 接收, 使用 空闲中断,dma 双缓冲模式,有以下几点需要注意的. 调试的时候断点不要打在 if (USART_GetITStatus(USART6, USART_ ...
- STM32 F4 DAC DMA Waveform Generator
STM32 F4 DAC DMA Waveform Generator Goal: generating an arbitrary periodic waveform using a DAC with ...
随机推荐
- Linux笔记之如何分割文件或管道流:split
一.简介 在Linux中合并文件可以使用cat命令,后面跟上要合并的文件然后重定向到一个新的文件中即可,甚至可以追加合并.但如果要将一个大文件分割为多个小文件应该如何操作呢? 在Linux的coreu ...
- 【Pyhon】利用BurpSuite到SQLMap批量测试SQL注入
前言 通过Python脚本把Burp的HTTP请求提取出来交给SQLMap批量测试,提升找大门户网站SQL注入点的效率. 导出Burp的请求包 配置到Burp的代理后浏览门户站点,Burp会将URL纪 ...
- Identical Binary Tree
Check if two binary trees are identical. Identical means the two binary trees have the same structur ...
- Python学习二|Python的一些疑问
最近写了一点Python代码,作为一个java程序员,面对Python这么便捷的语言不禁有点激动.不过呢,有时候也会遇到一些无法理解的东西. 例如: er = [[1,2,3], [4,5,6], [ ...
- 如何动态修改windows下的host文件
事件背景:为了测试数据提交后,需要在另一个环境的多个测试节点下去验证测试数据是否添加成功,找了一大堆放法,用了比较笨的方法实现了.不多废话思路如下: 为了万无一失,先备份hosts文件内容: 1.读取 ...
- 解决spring boot JavaMailSender部分收件人错误导致发送失败的问题
使用spring boot通常使用spring-boot-starter-mail进行邮件的发送.当进行邮件群发的话,如果一个收件人的地址错误,会导致所有邮件都发送失败.因此我们需要在邮件发送失败的时 ...
- 关于NOIP2018初赛
题面 这次PJ初赛有点傻了,可能是因为兴华水土不服吧(在这荒度了六年级的光阴). 选择题 DDDBBAAAABABBBB 第四题 当时懵了,我啥也不知道,于是就开始蒙 A.LAN B.WAN C.MA ...
- zabbix 自动发现
转自:https://blog.csdn.net/yyy72999/article/details/76065374 zabbix自动发现/zabbix自动发现规则 置顶2017年07月25日 14: ...
- Python学习笔记之函数式编程
python中的高阶函数 高阶函数就是 变量名指向函数,下面代码中的变量abs其实是一个函数,返回数字的绝对值,如abs(-10) 返回 10 def add(x,y,f): return f(x) ...
- EDMA3 笔记
A-synchronized和AB-synchronized传输在1个frame传输完成后地址计算有所不同. A-synchronized: last array in the frame ...