ardupilot_gazebo仿真(二)
ardupilot_gazebo仿真(二)
标签(空格分隔): 未分类
在模型中添加sensor
gezebo官网-sensor部分教程
gezebo官网-基础部分教程
Gazebo plugins in ROS
以camera为例
<sensor name="camera" type="camera">
<pose>0 0 0 0 -1.57 0</pose>
<camera>
<horizontal_fov>2.0</horizontal_fov>
<image>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>15000</far>
</clip>
</camera>
<always_on>1</always_on>
<update_rate>10</update_rate>
<visualize>1</visualize>
</sensor>
其中pose是3个position\((x,y,z)\)和1个旋转矢量\((\theta,\phi,\psi)\)
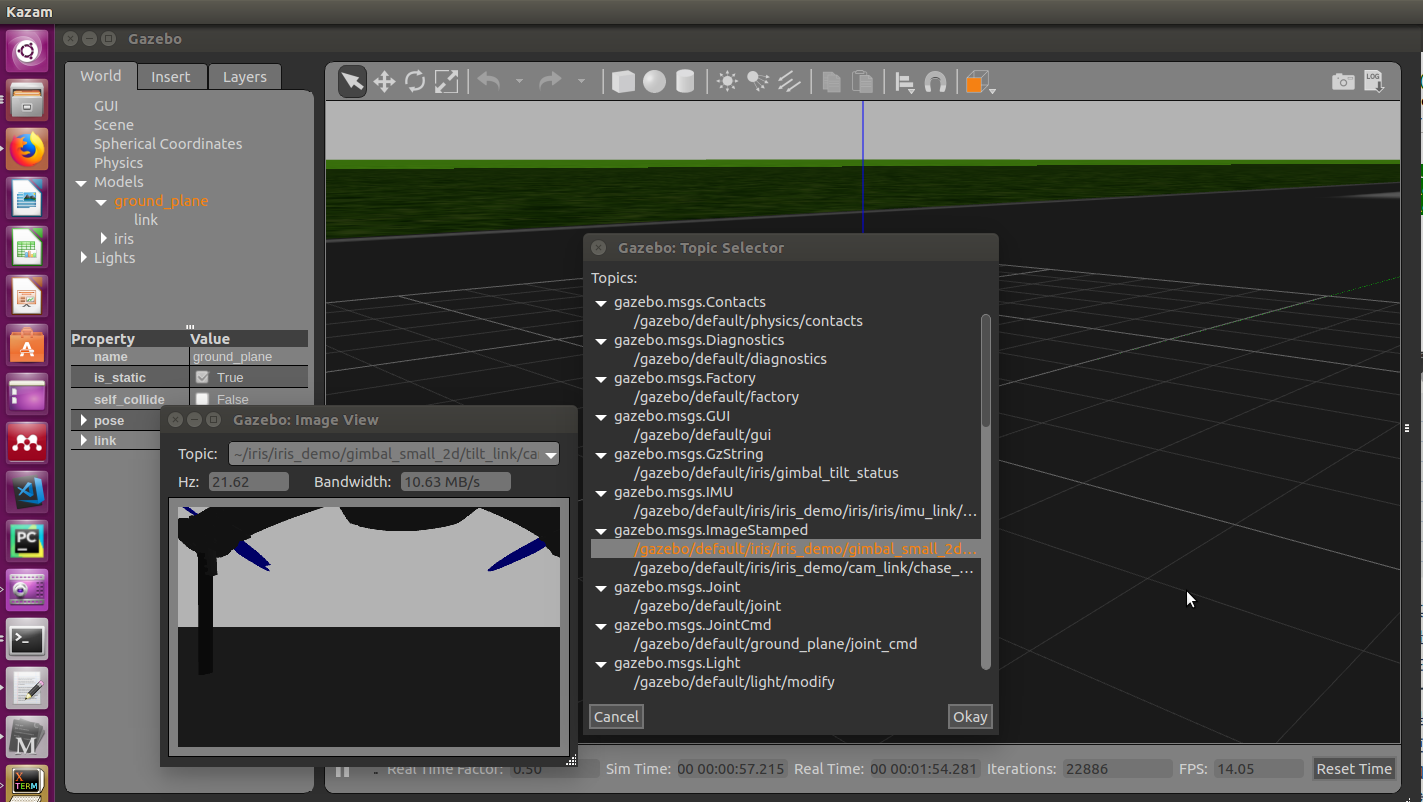
在ardupilot_gazebo中ardupilot_gazebo/models_gazebo/gimbal_small_2d是云台的模型,其中包括了相机的模型。通过更改pose可以改变相机的朝向和位置。
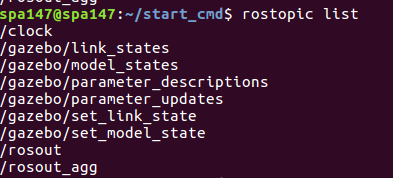
如果不对这个目录下的model.sdf进行修改,我们只能得到在gazebo中的图像,并不能与ROS进行通信,也就是说不能在rostopic中看到与camera相关的topic
所以需要添加 senosrplugin
<robot>
... robot description ...
<link name="sensor_link">
... link description ...
</link>
<gazebo reference="sensor_link">
<sensor type="camera" name="camera1">
... sensor parameters ...
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">
... plugin parameters ..
</plugin>
</sensor>
</gazebo>
</robot>
以camera为例
<!-- camera -->
<gazebo reference="camera_link">
<sensor type="camera" name="camera1">
<update_rate>30.0</update_rate>
<camera name="head">
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>800</width>
<height>800</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>300</far>
</clip>
<noise>
<type>gaussian</type>
<!-- Noise is sampled independently per pixel on each frame.
That pixel's noise value is added to each of its color
channels, which at that point lie in the range [0,1]. -->
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>0.0</updateRate>
<cameraName>rrbot/camera1</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera_link</frameName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
相关注释在官网介绍中可以看到。
下面是我们针对ardupilot_gazebo中的gimbal_small_2d模型进行的修改。在ardupilot_gazebo/models_gazebo/gimbal_small_2d目录下找到model.sdf,其中与 camera有关的代码如下:
<sensor name="camera" type="camera">
<pose>0 0 0 0 -1.57 0</pose>
<camera>
<horizontal_fov>2.0</horizontal_fov>
<image>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>15000</far>
</clip>
</camera>
<always_on>1</always_on>
<update_rate>30</update_rate>
<visualize>1</visualize>
</sensor>
在其中加入插件
<sensor name="camera" type="camera">
<pose>0 0 0 0 -1.57 0</pose>
<camera>
<horizontal_fov>2.0</horizontal_fov>
<image>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>15000</far>
</clip>
</camera>
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">
<always_on>1</always_on>
<update_rate>30</update_rate>
<cameraName>rrbot/camera1</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera_link</frameName>
<visualize>1</visualize>
</plugin>
</sensor>
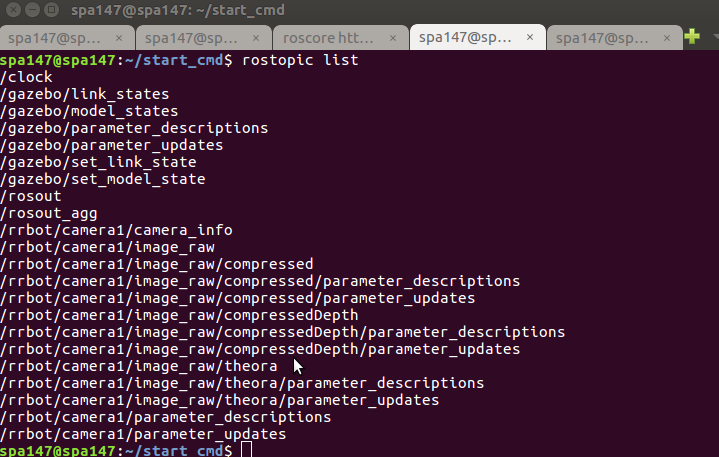
运行代码可以看到在rostopic中有了camera的相关topic
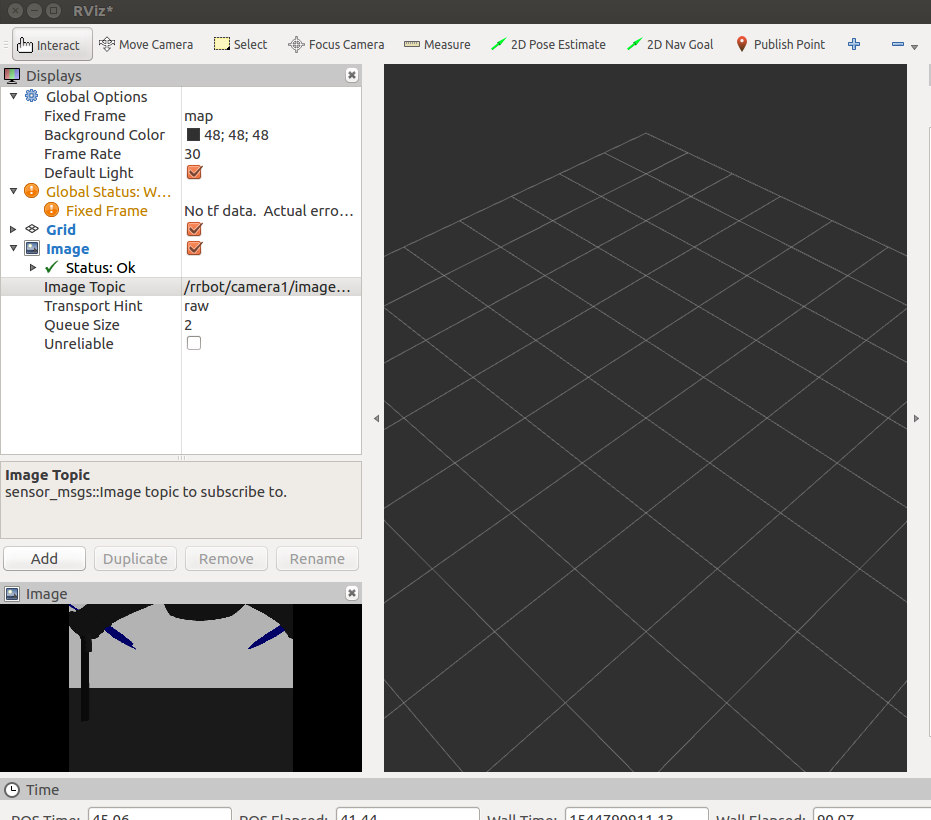
运行rviz然后添加imgae可以看到图像
rosrun rviz rviz
add image
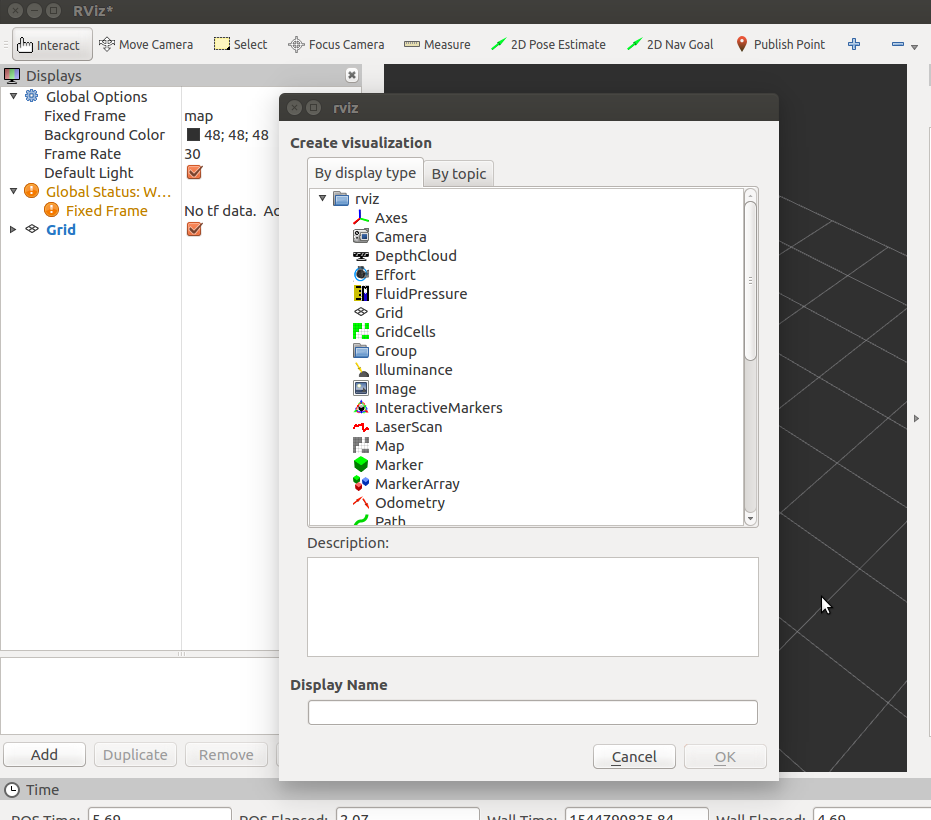
/rrbot/camera1/image_raw
ardupilot_gazebo仿真(二)的更多相关文章
- ardupilot_gazebo仿真(四)
ardupilot_gazebo仿真(四) 标签(空格分隔): 未分类 Multi-MAV simulation 参考官网给出的multi-vehicle-simulation的方法 在每次打开sim ...
- ardupilot_gazebo仿真(三)
ardupilot_gazebo仿真(三) 标签(空格分隔): 未分类 创建ROS node 实现对无人机的控制(软件在环) MAVROS MAVROS是ROS中的一个能够连接支持MAVLink地面站 ...
- ardupilot_gazebo仿真(一)
ardupilot_gazebo仿真 标签(空格分隔): 未分类 ardupilot_gazebo仿真 官网网址 代码更新地址 Ardupilot Gazebo Plugin & Models ...
- vivado与modelsim的联合仿真(二)
最近在做Zynq的项目,曾经尝试使用ISE+PlanAhead+XPS+SDK组合和Vivado+SDK来搭建工程,使用中发现前者及其不方便后者有诸多不稳定.近期得闻Xilinx退出Vivado20 ...
- MFC框架仿真<二>
- iOS开发——高级篇——UIDynamic 物理引擎
一.UIDynamic 1.简介什么是UIDynamicUIDynamic是从iOS 7开始引入的一种新技术,隶属于UIKit框架可以认为是一种物理引擎,能模拟和仿真现实生活中的物理现象重力.弹性碰撞 ...
- ARM开发(3)基于STM32的矩阵键盘控制蜂鸣器
一 矩阵键盘控制蜂鸣器原理: 1.1 本实验实现8*7矩阵键盘上按键控制蜂鸣器响. 1.2 实验思路:根据电路图原理,找出矩阵键盘行列所对应的引脚,赋予对应的按键值,然后控制蜂鸣器响. 1.3 ...
- ARM开发(2)基于STM32的蜂鸣器
基于STM32的蜂鸣器 一 蜂鸣器原理: 1.1 本实验实现1个蜂鸣器间隔1S鸣叫. 1.2 实验思路:根据电路图原理,给蜂鸣器相关引脚赋予高低电平,实现电路的导通,使蜂鸣器实现鸣叫或不鸣. 1 ...
- ARM开发(1) 基于STM32的LED跑马灯
一 跑马灯原理: 1.1 本实验实现2个led的跑马灯效果,即2个led交替闪烁. 1.2 实验思路:根据电路图原理,给led相关引脚赋予高低电平,实现电路的导通,使led灯发光. 1.3 开发 ...
随机推荐
- rest_framework--RESTful规范
#####RESTful规范##### 一.什么是restful restful其实就是一种软件架构风格,跟技术毫无关系.是一种面向资源编程的方法. 说起面向资源编程,我想起了之前了解到的面向过程编程 ...
- C++ primer 练习9.52 适配器stack 中缀表达式
//调试环境 VS2015//本人菜鸟一枚,不喜勿喷! 谢谢!!!//主要思想引自 http://www.cnblogs.com/dolphin0520/p/3708602.html//主要代码引自 ...
- C++定义一个简单的Computer类
/*定义一个简单的Computer类 有数据成员芯片(cpu).内存(ram).光驱(cdrom)等等, 有两个公有成员函数run.stop.cpu为CPU类的一个对象, ram为RAM类的一个对象, ...
- SPOJ8222 NSUBSTR - Substrings(后缀自动机)
You are given a string S which consists of 250000 lowercase latin letters at most. We define F(x) as ...
- 关于mysql的优化
MYSQL的优化一个很棘手的问题,也是一个公司最想处理得当的问题. 那么今天,本人为大家带来几点优化数据库的方法: 1.选取最适用的字段属性 一般来说,数据库的的表越小,在其上面执行的查询也会越快.因 ...
- 在Windows系统上使用压缩归档文件安装MySQL流程
最近需要做个小小的验证实验,需要安装MySQL,网上一搜发现教程繁多,bug也多,所以直接把官网的流程翻译过来,注意是压缩文件,不是安装版的,解压直接能用的,下面直接把流程贴过来: 使用压缩文档安装在 ...
- LeetCode 相交链表
基本思路 先计算出两个链表的长度 O(n) 将长的一个链表的指示指针移动到和短链表相同长度 O(n) 两个链表指示指针同时向前移动,直到二者相同或者NULL 代码实现 /** * Definition ...
- go 下面定义嵌套结构
package main import ( "fmt" ) const ( URL = "http://www.163.com" UID = "adm ...
- checkbox的第三种状态--不确定状态
视觉上,checkbox有三种状态:checked.unchecked.indeterminate(不确定的).看起来就像这样子:
- Vue插槽 slot
1. 什么是插槽 插槽slot 是往父组件中插入额外内容,实现组件的复用,一个插槽插入到一个对应的标签中 2. 实例: 一个组件中不允许有两个匿名插槽 </head> <body&g ...