N数码问题的启发式搜索算法--A*算法python实现
- 一、启发式搜索:A算法
1)评价函数的一般形式 : f(n) = g(n) + h(n)
g(n):从S0到Sn的实际代价(搜索的横向因子)
h(n):从N到目标节点的估计代价,称为启发函数(搜索的纵向因子);
特点: 效率高, 无回溯,
搜索算法
OPEN表 : 存放待扩展的节点.
CLOSED表 : 存放已被扩展过的节点.
2)评价函数 f(x) = g(x) + h(x)
当f(x) = g(x) 时,为宽度优先搜索
当f(x) = 1/g(x)时,为深度优先搜索
当f(x) = h(x) 时,为全局优先搜索
比较f(x)大小,决定节点搜索顺序,即在OPEN表中的顺序
3)Step1: 把初始节点S0放入OPEN表中;
Step2: 若OPEN表为空,则搜索失败,退出.
Step3: 移出OPEN中第一个节点N放入CLOSED表中, 并标以顺序号n;
Step4: 若目标节点Sg=N, 则搜索成功,结束.
Step5: 若N不可扩展, 则转Step2;
Step6: 扩展N, 生成一组子节点, 对这组子节点作如下处理后, 放入 OPEN表, 按f值重新排序OPEN表, 转 Step2;
删除重复节点和修改返回指针处理.
- 二、启发式搜索:A*算法
1)评价函数的一般形式:
f(n) = g(n) + h(n) 且 h(n) <= h*(n)
g(n),h(n):定义同A算法;
h*(n):从N到目标节点的最短路径; 称此时的A算法为A*算法.
2)程序关键点
解的路径的输出:通过目标状态节点向上回溯找其父节点,直至开始状态。
- 三、python代码实现
# -*- coding: utf-8 -*-
"""
Created on Sun Sep 16 14:31:40 2018
A*算法解决N数码问题
运行程序后如下是输入格式:
请输入矩阵的行数 3 输入对应的N
请输入初始矩阵A 1 0 2 一行行输入,每行数字空格隔开,每行最后一个数字输入完成后直接回车开始输入第二行 4 5 6 3 7 8
请输入目标矩阵B 1 2 3 8 0 4 7 6 5 """
import numpy as np
import copy
import time
from operator import itemgetter goal = {} def get_location(vec, num): #根据num元素获取num在矩阵中的位置
row_num = vec.shape[0] #numpy-shape函数获得矩阵的维数
line_num = vec.shape[1] for i in range(row_num):
for j in range(line_num):
if num == vec[i][j]:
return i, j def get_actions(vec): #获取当前位置可以移动的下一个位置,返回移动列表
row_num = vec.shape[0]
line_num = vec.shape[1] (x, y) = get_location(vec, 0) #获取0元素的位置
action = [(0, 1), (0, -1), (1, 0), (-1, 0)] if x == 0: #如果0在边缘则依据位置情况,减少0的可移动位置
action.remove((-1, 0))
if y == 0:
action.remove((0, -1))
if x == row_num - 1:
action.remove((1, 0))
if y == line_num - 1:
action.remove((0, 1)) return list(action) def result(vec, action): #移动元素,进行矩阵转化
(x, y) = get_location(vec, 0) #获取0元素的位置
(a, b) = action #获取可移动位置 n = vec[x+a][y+b] #位置移动,交换元素
s = copy.deepcopy(vec)
s[x+a][y+b] = 0
s[x][y] = n return s def get_ManhattanDis(vec1, vec2): #计算两个矩阵的曼哈顿距离,vec1为目标矩阵,vec2为当前矩阵
row_num = vec1.shape[0]
line_num = vec1.shape[1]
dis = 0 for i in range(row_num):
for j in range(line_num):
if vec1[i][j] != vec2[i][j] and vec2[i][j] != 0:
k, m = get_location(vec1, vec2[i][j])
d = abs(i - k) + abs(j - m)
dis += d return dis def expand(p, actions, step): #actions为当前矩阵的可扩展状态列表,p为当前矩阵,step为已走的步数
children = [] #children用来保存当前状态的扩展节点
for action in actions:
child = {}
child['parent'] = p
child['vec'] = (result(p['vec'], action))
child['dis'] = get_ManhattanDis(goal['vec'], child['vec'])
child['step'] = step + 1 #每扩展一次当前已走距离加1
child['dis'] = child['dis'] + child['step'] #更新该节点的f值 f=g+h(step+child[dis])
child['action'] = get_actions(child['vec'])
children.append(child) return children def node_sort(nodelist): #按照节点中字典的距离字段对列表进行排序,从大到小
return sorted(nodelist, key = itemgetter('dis'), reverse=True) def get_input(num):
A = []
for i in range(num):
temp = []
p = []
s = input()
temp = s.split(' ')
for t in temp:
t = int(t)
p.append(t)
A.append(p) return A def get_parent(node):
q = {}
q = node['parent']
return q def test():
openlist = [] #open表
close = [] #存储扩展的父节点 print('请输入矩阵的行数')
num = int(input()) print("请输入初始矩阵A")
A = get_input(num) print("请输入目标矩阵B")
B = get_input(num) print("请输入结果文件名")
resultfile = input() goal['vec'] = np.array(B) #建立矩阵 p = {}
p['vec'] = np.array(A)
p['dis'] = get_ManhattanDis(goal['vec'], p['vec'])
p['step'] = 0
p['action'] = get_actions(p['vec'])
p['parent'] = {} if (p['vec'] == goal['vec']).all():
return openlist.append(p) start_CPU = time.clock() #开始扩展时CPU开始计算 while openlist: children = [] node = openlist.pop() #node为字典类型,pop出open表的最后一个元素
close.append(node) #将该元素放入close表 if (node['vec'] == goal['vec']).all(): #比较当前矩阵和目标矩阵是否相同
end_CPU = time.clock() #CPU结束计算 h = open(resultfile,'w',encoding='utf-8',) #将结果写入文件 并在控制台输出
h.write('搜索树规模:' + str(len(openlist)+len(close)) + '\n')
h.write('close:' + str(len(close)) + '\n')
h.write('openlist:' + str(len(openlist)) + '\n')
h.write('cpu运行时间:' + str(end_CPU - start_CPU) + '\n')
h.write('路径长:' + str(node['dis']) + '\n') h.write('解的路径:' + '\n')
i = 0
way = []
while close:
way.append(node['vec']) #从最终状态开始依次向上回溯将其父节点存入way列表中
node = get_parent(node)
if(node['vec'] == p['vec']).all():
way.append(node['vec'])
break
while way:
i += 1
h.write(str(i) + '\n')
h.write(str(way.pop()) + '\n')
h.close()
f = open(resultfile,'r',encoding='utf-8',)
print(f.read()) return children = expand(node, node['action'], node['step']) #如果不是目标矩阵,对当前节点进行扩展,取矩阵的可能转移情况 for child in children: #如果转移之后的节点,既不在close表也不再open表则插入open表,如果在close表中则舍弃,如果在open表则比较这两个矩阵的f值,留小的在open表
f = False
flag = False
j = 0
for i in range(len(openlist)):
if (child['vec'] == openlist[i]['vec']).all():
j = i
flag = True
break
for i in range(len(close)):
if(child['vec'] == close[i]).all():
f = True
break
if f == False and flag == False :
openlist.append(child) elif flag == True:
if child['dis'] < openlist[j]['dis']:
del openlist[j]
openlist.append(child) openlist = node_sort(openlist) #对open表进行从大到小排序 test()
- 四、程序运行结果如下图所示
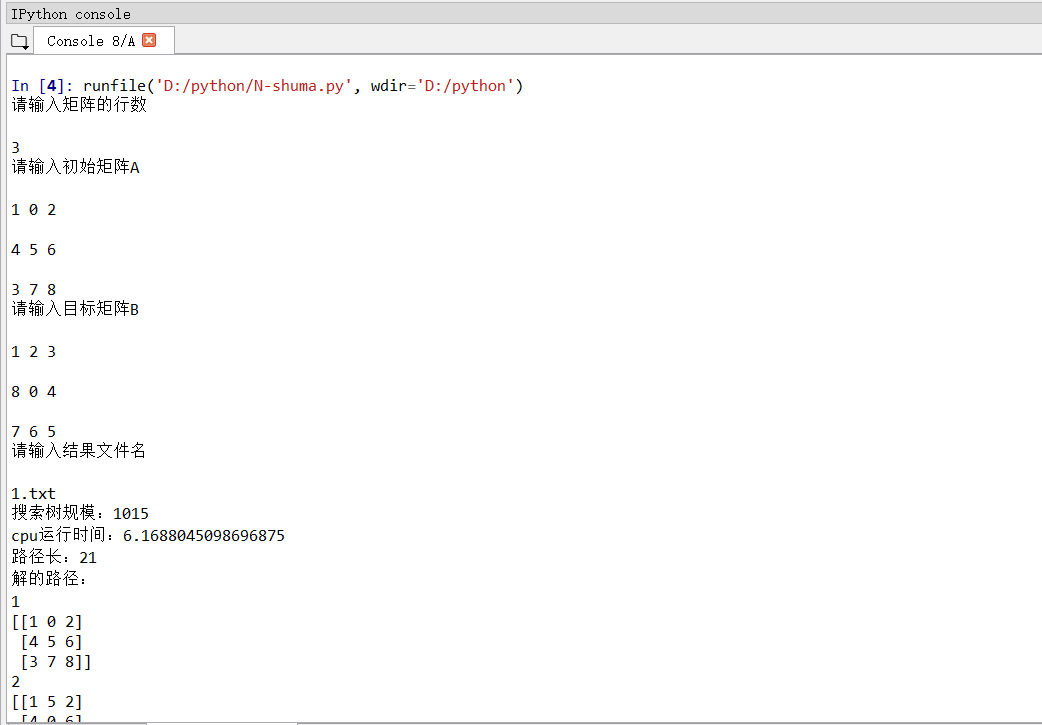
图 1

图 2
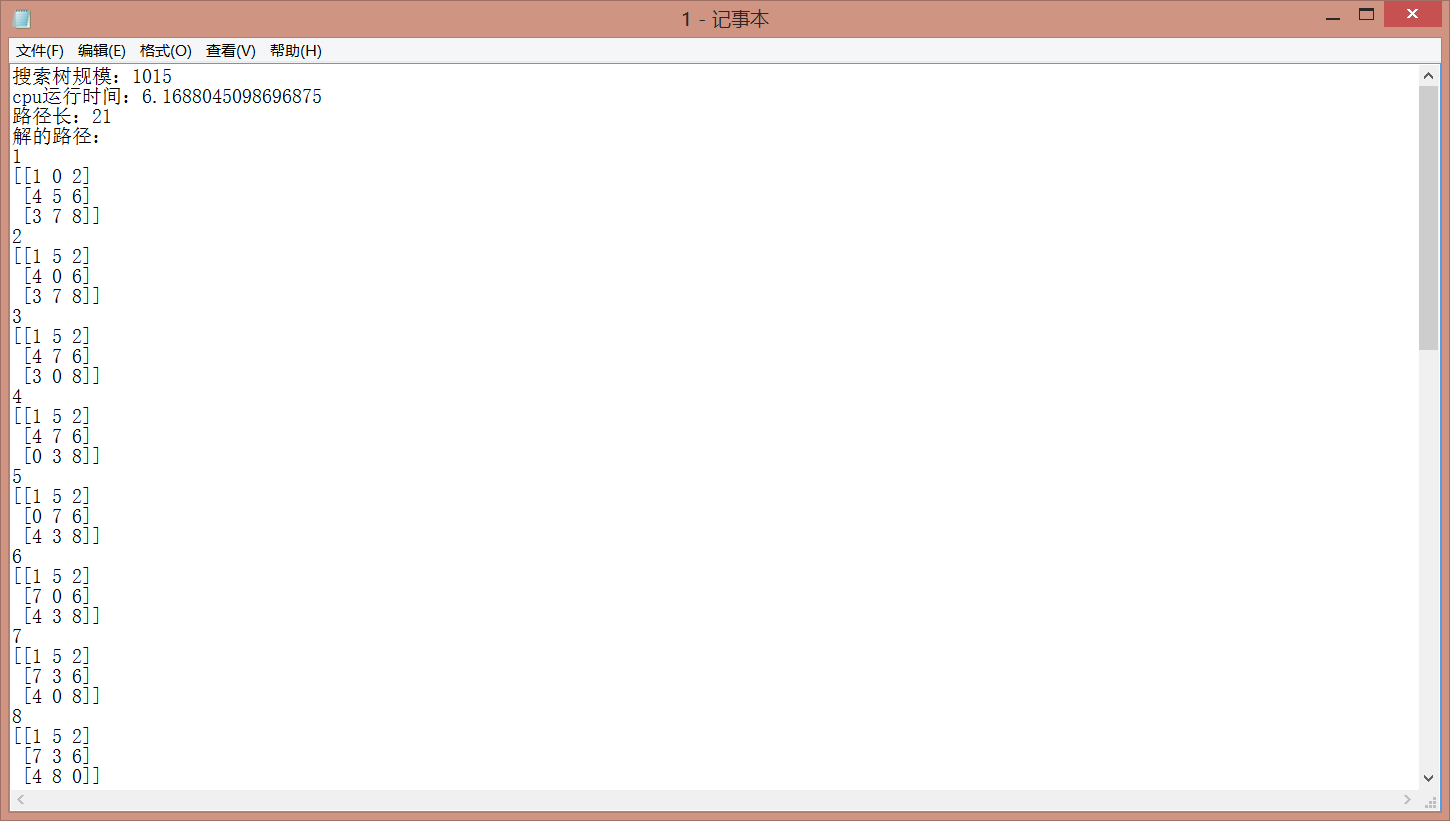
图 3
- 五、总结
通过这次编程了解到了搜索具有探索性,要提高搜索效率(尽快地找到目标节点),或要找最佳路径(最佳解)就必须注意搜索策略。对于状态图搜索,已经提出了许多策略,它们大体可分为盲目搜索(bland search)和启发式搜索(heuristic search)两大类。其中盲目搜索是无向导搜索。启发式搜索是有向导搜索,即利用启发信息(函数)引导去寻找问题解。通过A*算法解决N数码问题实验过程中也遇到很多问题,比如节点扩展的方向问题等,通过这次实验不仅锻炼了自己python编程能力,也让自己对N数码求解最优路径问题有了更清晰的认识,希望自己能在老师和同学的帮助下,能不断进步,当然最重要的是自己得付出,只会幻想而不行动的人,永远也体会不到收获果实时的喜悦。加油!!
N数码问题的启发式搜索算法--A*算法python实现的更多相关文章
- 【小白学游戏常用算法】二、A*启发式搜索算法
在上一篇博客中,我们一起学习了随机迷宫算法,在本篇博客中,我们将一起了解一下寻路算法中常用的A*算法. 通常情况下,迷宫寻路算法可以使用深度优先或者广度优先算法,但是由于效率的原因,不会直接使用这些算 ...
- pageRank算法 python实现
一.什么是pagerank PageRank的Page可是认为是网页,表示网页排名,也可以认为是Larry Page(google 产品经理),因为他是这个算法的发明者之一,还是google CEO( ...
- 常见排序算法-Python实现
常见排序算法-Python实现 python 排序 算法 1.二分法 python 32行 right = length- : ] ): test_list = [,,,,,, ...
- kmp算法python实现
kmp算法python实现 kmp算法 kmp算法用于字符串的模式匹配,也就是找到模式字符串在目标字符串的第一次出现的位置比如abababc那么bab在其位置1处,bc在其位置5处我们首先想到的最简单 ...
- KMP算法-Python版
KMP算法-Python版 传统法: 从左到右一个个匹配,如果这个过程中有某个字符不匹配,就跳回去,将模式串向右移动一位.这有什么难的? 我们可以 ...
- 压缩感知重构算法之IRLS算法python实现
压缩感知重构算法之OMP算法python实现 压缩感知重构算法之CoSaMP算法python实现 压缩感知重构算法之SP算法python实现 压缩感知重构算法之IHT算法python实现 压缩感知重构 ...
- 压缩感知重构算法之OLS算法python实现
压缩感知重构算法之OMP算法python实现 压缩感知重构算法之CoSaMP算法python实现 压缩感知重构算法之SP算法python实现 压缩感知重构算法之IHT算法python实现 压缩感知重构 ...
- 压缩感知重构算法之CoSaMP算法python实现
压缩感知重构算法之OMP算法python实现 压缩感知重构算法之CoSaMP算法python实现 压缩感知重构算法之SP算法python实现 压缩感知重构算法之IHT算法python实现 压缩感知重构 ...
- 压缩感知重构算法之IHT算法python实现
压缩感知重构算法之OMP算法python实现 压缩感知重构算法之CoSaMP算法python实现 压缩感知重构算法之SP算法python实现 压缩感知重构算法之IHT算法python实现 压缩感知重构 ...
随机推荐
- (转)Vue 爬坑之路(一)—— 使用 vue-cli 搭建项目
vue-cli 是一个官方发布 vue.js 项目脚手架,使用 vue-cli 可以快速创建 vue 项目,GitHub地址是:https://github.com/vuejs/vue-cli 一. ...
- halcon 模板匹配 -- create_shape_model
create_shape_model(Template : : //reduce_domain后的模板图像 NumLevels,//金字塔的层数,可设为“auto”或0—10的整数 AngleStar ...
- Model2
Model1: Model2:
- Can't find variable: SockJS vue项目
用的vue-cli(webpack-simple模板),在开发环境运行(npm run dev),一直都没有问题,突然在ios的safari中调试,出现报错:Can't find variable: ...
- 【转】【Oracle 集群】ORACLE DATABASE 11G RAC 知识图文详细教程之RAC 特殊问题和实战经验(五)
原文地址:http://www.cnblogs.com/baiboy/p/orc5.html 阅读目录 目录 共享存储 时间一致性 互联网络(或者私有网络.心跳线) 固件.驱动.升级包的一致性 共 ...
- 【转载】深入理解Java的接口和抽象类
深入理解Java的接口和抽象类 对于面向对象编程来说,抽象是它的一大特征之一.在Java中,可以通过两种形式来体现OOP的抽象:接口和抽象类.这两者有太多相似的地方,又有太多不同的地方.很多人在初学的 ...
- DATEADD()
定义和用法 DATEADD() 函数在日期中添加或减去指定的时间间隔. 语法 DATEADD(datepart,number,date) date 参数是合法的日期表达式.number 是您希望添加的 ...
- lucene7.1.0实现搜索文件内容
Lucene的使用主要体现在两个步骤: 1 创建索引,通过IndexWriter对不同的文件进行索引的创建,并将其保存在索引相关文件存储的位置中. 2 通过索引查寻关键字相关文档. 首先,我们需要定义 ...
- 数据结构与算法(2)- vector概念介绍
声明:虽然本系列博客与具体的编程语言无关.但是本文作者对c++相对比较熟悉,其次是java,所以难免会有视角上的偏差.举例也大多是和这两门语言相关. Vector的出现主要是为了解决数组的静态空间的问 ...
- 进程映射、mmap(day05)
一.内存管理(续) 每个进程都有自己独立的4G的虚拟地址空间. 冯.诺伊曼体系结构 哈佛体系结构 section 代码段 只读数据段 栈段 举例说明 数据所属的段. 代码参见 memory.c 如何获 ...