ROS学习笔记四:用C++编写ROS发布与订阅
一、创建并编译功能包
1.1 创建功能包
在工作空间的 src 目录下创建功能包:
$ cd ~/dev/catkin_ws/src
$ catkin_create_pkg chapter2_tutorials std_msgs roscpp
1.2 编译功能包
进入工作目录下编译全部功能包:
$ cd ~/dev/catkin_ws/
$ catkin_make
如果到达100%,表示一切顺利,否则会报错停止编译。
二、创建并编译节点
2.1 创建节点
进入功能包的 src 目录下,在这个文件夹中,创建两个新文件:example1_a.cpp 和 example1_b.cpp。
example1_a.cpp(发布节点):
#include "ros/ros.h" //"ros/ros.h"包含ROS节点所有节点的必要文件
#include "std_msgs/String.h" //"std_msgs/String.h"包含消息类型
#include <sstream>
int main(int argc, char **argv)
{
ros::init(argc, argv, "example1_a"); //启动该节点并设置其名称(example1_a),该名称是唯一的
ros::NodeHandle n; //设置节点进程的句柄
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("message", 1000); //把这个节点设置成发布者,并把发布主题的类型告诉节点管理器。第一个参数是消息名称“message”,第二个参数将缓冲区设置为1000个消息
ros::Rate loop_rate(10); //设置频率10Hz
while (ros::ok()) //一直运行,直到CTRL+C停止运行
{
std_msgs::String msg; //创建消息变量,变量类型必须符合发送的要求
std::stringstream ss;
ss << " I am the example1_a node "; //要发布的消息内容
msg.data = ss.str();
chatter_pub.publish(msg); //发布消息
ros::spinOnce(); //如果出现订阅者,ROS会更新和读取所有主题
loop_rate.sleep(); //按频率挂起
}
return 0;
}
example1_b.cpp(订阅节点):
#include "ros/ros.h"
#include "std_msgs/String.h"
/*接收消息然后发布*/
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
ROS_INFO("I heard: [%s]", msg->data.c_str()); //在命令行窗口显示消息内容
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "example1_b");
ros::NodeHandle n;
ros::Subscriber sub = n.subscribe("message", 1000, chatterCallback); //创建一个订阅者,从主题获取以“message”为名称的消息,缓冲区为1000,处理消息句柄的回调函数chatterCallback
ros::spin(); //ros::spin()库是响应循环,消息到达时调用函数chatterCallback,CTRL+C结束循环
return 0;
}
2.2 编译节点
将下列几行代码添加到CMakeLists.txt文件中include_directories(include ${catkin_INCLUDE_DIRS})之后:
add_executable(chap2_example1_a src/example1_a.cpp)
add_executable(chap2_example1_b src/example1_b.cpp)
add_dependencies(chap2_example1_a chapter2_tutorials_generate_messages_cpp)
add_dependencies(chap2_example1_b chapter2_tutorials_generate_messages_cpp)
target_link_libraries(chap2_example1_a ${catkin_LIBRARIES})
target_link_libraries(chap2_example1_b ${catkin_LIBRARIES})
回到工作目录下,编译功能包:
$ cd ~/dev/catkin_ws/
$ catkin_make chapter2_tutorials
如果顺利编译的话,将会生成两个可执行程序 example1_a 和 example1_b 文件,默认生成可执行文件的目录是catkin工作空间的devel目录下的lib目录。
3 检验编写的节点
首先要确认在carkin_make之后加载了工作空间的环境变量,然后分别在三个新的终端运行如下命令:
$ roscore
$ rosrun chapter2_tutorials chap2_example1_a
$ rosrun chapter2_tutorials chap2_example1_b
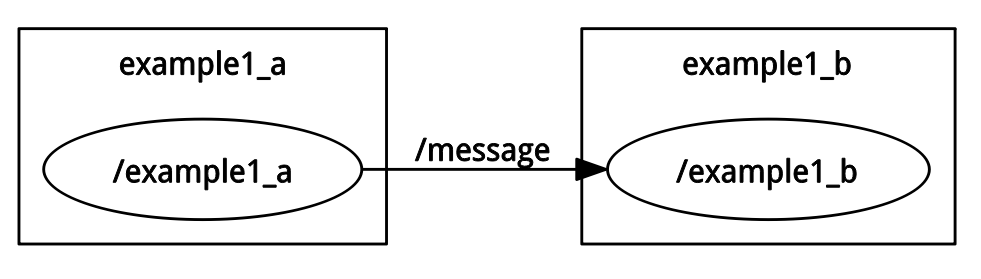
使用rqt_graph命令能够创建一个显示当前系统运行情况的动态图形,如下图所示。example1_a 节点发布 /message 主题,同时 example1_b 节点订阅了这个主题。
ROS学习笔记四:用C++编写ROS发布与订阅的更多相关文章
- Redis学习笔记四:独立功能之发布与订阅
客户端可以通过执行 subscribe 命令订阅一个或多个频道,每当有其他客户端向被订阅的频道发送消息时,频道所有的订阅者都会收到这条消息. 客户端还可以通过执行 psubscribe 命令订阅一个或 ...
- Learning ROS for Robotics Programming Second Edition学习笔记(四) indigo devices
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 Learning ROS for Robotics Pr ...
- ROS学习笔记七:在ROS中使用USB摄像头
下面是一些USB摄像头的驱动(大多数摄像头都支持uvc标准): 1 使用软件库里的uvc-camera功能包 1.1 检查摄像头 lsusb ----------------------------- ...
- C#可扩展编程之MEF学习笔记(四):见证奇迹的时刻
前面三篇讲了MEF的基础和基本到导入导出方法,下面就是见证MEF真正魅力所在的时刻.如果没有看过前面的文章,请到我的博客首页查看. 前面我们都是在一个项目中写了一个类来测试的,但实际开发中,我们往往要 ...
- ROS入门笔记(二):ROS安装与环境配置及卸载(重点)
ROS入门笔记(二):ROS安装与环境配置及卸载(重点) [TOC] 1 ROS安装步骤 1.1 ROS版本 ROS目前只支持在Linux系统上安装部署, 它的首选开发平台是Ubuntu. 发布时间 ...
- IOS学习笔记(四)之UITextField和UITextView控件学习
IOS学习笔记(四)之UITextField和UITextView控件学习(博客地址:http://blog.csdn.net/developer_jiangqq) Author:hmjiangqq ...
- java之jvm学习笔记四(安全管理器)
java之jvm学习笔记四(安全管理器) 前面已经简述了java的安全模型的两个组成部分(类装载器,class文件校验器),接下来学习的是java安全模型的另外一个重要组成部分安全管理器. 安全管理器 ...
- Typescript 学习笔记四:回忆ES5 中的类
中文网:https://www.tslang.cn/ 官网:http://www.typescriptlang.org/ 目录: Typescript 学习笔记一:介绍.安装.编译 Typescrip ...
- ES6学习笔记<四> default、rest、Multi-line Strings
default 参数默认值 在实际开发 有时需要给一些参数默认值. 在ES6之前一般都这么处理参数默认值 function add(val_1,val_2){ val_1 = val_1 || 10; ...
随机推荐
- TDBXJSONStream(BERLIN新增)的使用
DELPHI 10.1 BERLIN新增TDBXJSONStream类,用于方便地将数据序列为JSON,和将JSON还原出来数据. DATASNAP远程方法也相应地增加了支持返回TDBXJSONStr ...
- 【c++】动态内存
静态存储区:内存在程序编译的时候就已经分配好,这块内存在程序的整个运行期间都存在.它主要存放静态数据.全局数据和常量.注意:const常量在定义时必须初始化 栈区:在执行函数时,函数内局部变量的存储单 ...
- Hadoop-异常-Exception in thread "main" java.lang.NoClassDefFoundError: org/apache/avro/io/DatumReader
//maven org.apache.avr 下载不完全 ,去maven If you are using maven to build your jar, you need to add the ...
- stl 之set图解
使用set或multiset之前,必须增加头文件<set> Set.multiset都是集合类,区别在与set中不同意有反复元素,multiset中同意有反复元素. sets和multis ...
- 【Android开发-4】进入实践,最喜欢折腾的计算器
前言:前面对项目文件有了感性认识.接下来我们就须要通过不断实践,对项目的文件有理性的认识. 曾经折腾Unity3d.IOS开发都是拿计算器开刀.所以这次Android开发实践也不例外,继续拿计算器折腾 ...
- bufferevent 与 socket
http://blog.sina.com.cn/s/blog_56dee71a0100qx4s.html 很多时候,除了响应事件之外,应用还希望做一定的数据缓冲.比如说,写入数据的时候,通常的运行模式 ...
- [MAT]使用MAT比較多个heap dump文件
使用MAT比較多个heap dump文件 调试内存泄露时,有时候适时比較2个或多个heap dump文件是非常实用的.这时须要生成多个单独的HPROF文件. 以下是一些关于怎样在MAT里比較多个hea ...
- java 生成压测数据
询价接口压测,需要批量生成数据, 数据包括4个字段(车牌号,车架号,发动机号,支付号)licenseNo,vehicleFrameNo,engineNo,payFlowId 需符合LoadRunner ...
- java实现从报文中获取投保单号
java实现从报文中获取投保单号 投保单号正则表达式: String regex = "<proposalNo>([0-9]+)</proposalNo>[\\s\\ ...
- 算法4-10:BST平衡二叉树的删除操作
偷懒方法 public void delete(Key key) { insert(key, null); } 这样的方法就是将key相应的值覆盖成null.当读取该键值的时候将会返回null. 这是 ...