ESP8266 SPI通信
设备与设备之间的通信往往都伴随着总线的使用,而用得比较多的就当属于SPI总线和I2C总线,而恰巧NodeMcu也支持这两种总线通信
1. SPI总线——SPI类库的使用
SPI是串行外设接口(Serial Peripheral Interface)的缩写。是Motorola公司推出的一种同步串行接口技术,是一种高速的、全双工、同步的通信总线。通过它可以连接使用同样接口的外部设备。例如,ESP8266模组上,ESP8266EX芯片就是通过SPI接口与外接flash芯片连接的
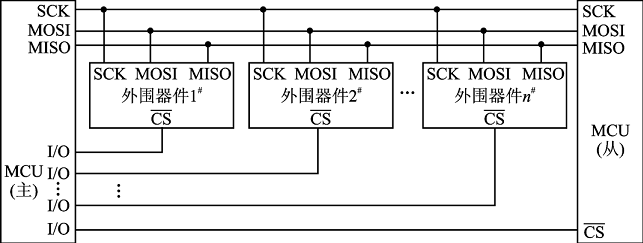
SPI作为一种总线通信方式,可以通过SPI接口连接多个从设备,并通过片选控制来选择对某一设备进行连接使用。如下图所示:
1.1 SPI总线概述
SPI的通信原理很简单,它是全双工主从通信方式,这种模式下通常有一个主设备和一个或者多个从设备(注意,同一时刻,只有一个主设备和一个从设备进行通信),需要至少4根线,特殊情况下(单向传输时)3根线也可以。
SPI的器件工作在SPI规定下的两种基本模式,即SPI主模式和SPI从模式。在一个SPI设备中,通常有如下表的几个引脚:

主设备负责启动通信,负责输出时钟信号以及选择通信的从设备。当有多个从设备的时候,因为每个从设备上都有一个CS引脚接入到主设备中,当我们主设备和某个从设备通信时将需要将从设备的CS引脚电平设置为低电平或者高电平(根据实际情况而定)。数据的收发通过MISO和MOSI进行
1.2 NodeMcu SPI
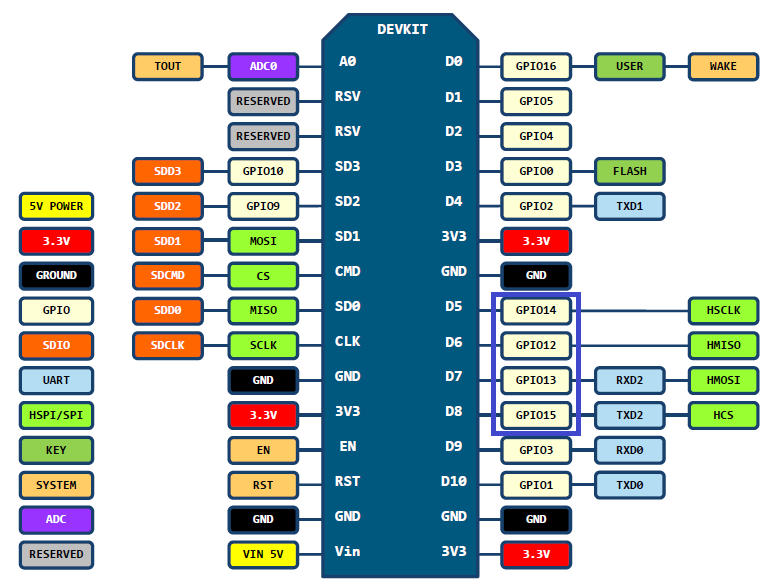
NodeMcu的SPI(注意与HSPI区分)引脚(SD0-SD3、CLK、CMD)专门用于与ESP-12E的外接flash芯片进行Quad-SPI通信,因此不能用于SPI应用。
基于ESP8266的NodeMcu具有HSPI,具有4个可用于SPI通信的引脚(GPIO12-GPIO15)。通过这个SPI接口,我们可以将任何支持SPI的设备与NodeMcu连接起来,并与其进行通信
知识扩展——标准SPI、Dual SPI和Quad-SPI
1.标准SPI
标准SPI通常就叫做SPI,它是一种串行外设接口规范,有4根引脚信号:clk、cs、mosi、miso;
2.Dual SPI
它只是针对SPI Flash而言,不是针对所有SPI外设。对于SPI Flash,全双工并不常用,因此扩展了mosi和miso的用法,让它们工作在半双工,用以加倍数据传输。也就是对于Dual SPI Flash,可以发送一个命令字节进入dual mode,这样mosi变成SIO0(serial io 0),mosi变成SIO1(serial io 1),这样一个时钟周期内就能传输2个bit数据,加倍了数据传输;
3.Quad SPI
与Dual SPI类似,也是针对SPI Flash,Quad SPI Flash增加了两根I/O线(SIO2,SIO3),目的是一个时钟内传输4个bit。所以可以理解为:在传输速度上,Quad SPI=2Dual SPI=4SPI。
所以对于SPI Flash,有标准spi flash,dual spi , quad spi 三种类型,分别对应3-wire, 4-wire, 6-wire,在相同clock下,线数越多,传输速率越高。
温馨提示
读者可以自行了解一下NodeMcu的flash是什么标准。说不定烧录代码失败就是因为这个原因(Flash模式是QIO或者DIO)
1.3 ESP8266 SPI类库成员函数
Arduino Core For ESP8266的SPI类库定义在SPI.h头文件中。该类库只提供了作为SPI主设备的API,其成员函数如下:
1.begin()
该功能用于初始化SPI通信。
语法:SPI.begin()
参数:无;
返回值: 无;
2.end()
该功能用于关闭SPI通信。
语法:SPI.end()
参数:无;
返回值: 无;
3.setBitOrder()
设置数据传输顺序。
语法:SPI.setBitOrder(order)
参数:
order,传输顺序,取值为:
~ LSBFIRST,低位在前;
~ MSBFIRST,高位在前。
返回值: 无;
4.setClockDivider()
设置通信时钟。时钟信号由主机产生,从机不用配置。但主机的SPI时钟频率应该在从机允许的处理速度范围内。
语法:SPI.setClockDivider(divider)
参数:
divider,SPI通信的时钟是由系统时钟分频得到的。可使用的分频配置为:
~ SPI_CLOCK_DIV2,2分频;
~ SPI_CLOCK_DIV4,4分频(默认配置);
~ SPI_CLOCK_DIV8,8分频;
~ SPI_CLOCK_DIV16,16分频;
~ SPI_CLOCK_DIV32,32分频;
~ SPI_CLOC K_DIV64,64分频;
~ SPI_CLOCK_DIV128,128分频;
返回值: 无;
5.setDataMode()
该功能用于设置数据模式。
语法:SPI.setDataMode(mode)
参数:
mode,可配置的模式,包括:
~ SPI_MODE0;
~ SPI_MODE1;
~ SPI_MODE2;
~ SPI_MODE3;
返回值: 无;
注意点:
SPI四种模式中,SPI的相位(CPHA)和极性(CPOL)分别可以为0或者1,对应的4种组合构成了4种模式:
~ SPI_MODE0:CPOL=0,CPHA=0;
~ SPI_MODE1:CPOL=0,CPHA=1;
~ SPI_MODE2:CPOL=1,CPHA=0;
~ SPI_MODE3:CPOL=1,CPHA=1;
时钟极性CPOL:即SPI空闲时,时钟信号SCLK的电平(1是空闲时高电平,0是空闲时低电平)。
时钟相位CPHA:即SPI在SCLK第几个边沿开始采样(0是第一个边沿开始,1是第二个边沿开始)
6.transfer()
该功能用于传输1B的数据,参数为发送的数据,返回值为接收到的数据。SPI是全双工通信,因此每发送1B的数据,也会接收到1B的数据。
语法:SPI.transfer(val)
参数:
val,要发送的字节数据。
返回值: 从机返回的1B数据;
7.transfer16()
该功能用于传输2B的数据,参数为发送的数据,返回值为接收到的数据。
语法:SPI.transfer16(val)
参数:
val,要发送的16位(uint16_t)数据。
返回值: 从机返回的2B数据;
注意点: 发送的uint16_t数据,其实底层也是分开两个字节分别发送两次,接收到的2B数据,也会重新组装成uint16_t数据;
8.transferBuf()
该功能用于传输一个缓冲区数据,参数为发送的缓冲区buf。
语法:SPI.transfer(buf,count)
参数:
buf,要发送的缓冲区(uint8_t*)数据。
count,缓冲区的大小。
返回值: 无;
注意点: 虽然没有返回值,但是从从机传输回来的数据会替换掉buf缓冲区的数据,所以调用完整个方法之后,buf里面的数据就是从机返回的数据;
9.pins()
该功能用于切换SPI引脚映射,需要在SPI.begin()之前调用SPI.pins(6,7,8,0)。
语法:SPI.pins(sck, miso, mosi, ss)
参数:
sck,时钟引脚,固定为6;
miso,主设备输入,从设备输出引脚,固定为7;
mosi,主设备输出,从设备输入,固定为8;
ss,使能信号引脚,固定为0。
返回值: 无;
注意点: 通常情况下,ESP8266的SPI对应引脚为MOSI-GPIO13,MISO-GPIO12,SCLK-GPIO14,SS-GPIO15。如果在调用SPI.begin()之前调用SPI.pins(6,7,8,0),那么引脚映射就会变成MOSI-SD1,MISO-SD0,SCLK-CLK,HWCS-GPIO0。可以看出它们和ESP8266模块的外接Flash共享了SPI引脚。这个时候SPI的SS控制位就不是由我们的代码来控制,而是由系统硬件本身来调配,因为它必须确保外接Flash的优先级是最高的。在此,笔者不建议这么用
1.4 SPI寄存器
所有的SPI设置都由Arduino SPI控制寄存器(SPCR)来决定。这个寄存器就是微控制器内存的一个字节,它是可读写的。寄存器提供的服务通常有3类:控制、数据和状态。
控制寄存器(SPCR)
编码设置控制多种微控制器的功能。通常控制寄存器中的一个位影响某个特定的设置(学过单片机系统的读者应该比较了解这个,比如中断允许控制寄存器IE、中断优先级控制寄存器IP、定时器/计数器控制寄存器TCON等)。
数据寄存器(SPDR)
存储数据的寄存器,比如串行口锁存器SBUF,仅仅hold住了一个字节。比如,SPI数据寄存器hold住了要发往MOSI线的一个字节,或者这个数据是要从MISO线传入的。
状态寄存器(SPSR)
根据多种微控制器的条件改变其状态。比如,SPI状态寄存器(SPSR)的第七位被设置为1表示有数据从SPI传入或传出。
在这里,我们主要讲解一下SPI控制寄存器(SPCR),一共有8位,每一个都控制了一种特定的SPI设置
天子骄龙
ESP8266 SPI通信的更多相关文章
- ESP8266开发之旅 基础篇⑤ ESP8266 SPI通信和I2C通信
设备与设备之间的通信往往都伴随着总线的使用,而用得比较多的就当属于SPI总线和I2C总线,而恰巧NodeMcu也支持这两种总线通信,所以本章的主要内容就是讲解ESP8266 SPI和I2C总线 ...
- 三,ESP8266 SPI
重点是说SPI通信协议,,,, 不要害怕协议因为协议是人规定的,,刚好我也是人......规定的协议既然能成为规范让所有人所接受,那么必然有它的优势和优点,必然值得学习,, 害怕协议的人是因为当初碰到 ...
- 三,ESP8266 SPI(基于Lua脚本语言)
https://www.cnblogs.com/yangfengwu/p/7520260.html 重点是说SPI通信协议,,,, 不要害怕协议因为协议是人规定的,,刚好我也是人......规定的协议 ...
- 理解一下单片机的I2C和SPI通信
应某位网友要求,今天说一下单片机的I2C SPI通信,可能说不清楚,因为这毕竟要做实验才可完全理解. I2C和SPI是两种不同的通信协议. 听到协议,似乎高不可攀,其实协议就是人们定义的一个标准而已, ...
- SPI通信实验---verilog(FPGA作为从机,使用可读可写)
本实验讲究实用性,故设计思想为:主机先向从机发送地址,若是向从机写入数据,则向从机发送数据,若是读取从机数据,则向从机发送时钟,然后在时钟下降沿读取数据即可.cs信号上升沿作为SPI通信的结束信号.r ...
- SPI通信
SPI是由Motorola公司提出的一种同步串行外围接口:它在速度要求不高,低功耗,需要保存少量参数的智能化传感系统中得到了广泛应用: SPI是一个全双工的同步串行接口,在数据传输过程中,总线上只能是 ...
- 关于SPI通信原理与程序实现
第一次接触SPI是因为当时用到NRF24L01,需要用SPI进行通信.因为2401上面写着MOSI.MISO.SS.RST,当时以为只要用到SPI就肯定有这几个引脚,以至于限制了自己的思维.只认识MI ...
- [转]SPI通信原理简介
[转自]http://www.cnblogs.com/deng-tao/p/6004280.html 1.前言 SPI是串行外设接口(Serial Peripheral Interface)的缩写.是 ...
- linux 下SPI通信注意事项(待续)
一.2台Linux设备之间使用SPI通信 1.标准Linux只支持Master 模式.但是可以在驱动中修改为Slave模式: 2.硬件SPI可能支持Slave模式,也可能不支持.这个要提前确认好: 3 ...
随机推荐
- FreeBSD Here is how to upgrade
freebsd-version or uname -mrs freebsd-update fetch install pkg update && pkg upgrade -y fr ...
- spring cloud依赖服务调用优化
1.请求缓存 优点: 注解方式实现: 设置缓存key: 如果可以确认,对要缓存的数据的操作,主要是写操作都只在feign调用中完成且读多写少,则可以使用此方式:如果在其他地方还有对数据的写操作,则可能 ...
- 【react】input输入框可输入的最好实现方式
使用的是refs.react中输入框不能直接定义value.输入框是可变的,react会提示报错.需要使用的inChange事件(输入框内容被改变时触发). 要定义输入框初始值,需要在componen ...
- JMeter接口测试印象篇(win10)
参考博文1:https://www.cnblogs.com/suim1218/p/9257369.html 参考博文2:https://blog.csdn.net/u011541946/article ...
- 【PyTorch】PyTorch使用LMDB数据库加速文件读取
PyTorch使用LMDB数据库加速文件读取 原始文档:https://www.yuque.com/lart/ugkv9f/hbnym1 对于数据库的了解较少,文章中大部分的介绍主要来自于各种博客和L ...
- 【VS开发】解决位图缩放失真
当用以下函数加载一张位图时,当窗口发生重绘更改大小时,位图将失真: CBitmap bitmap; bitmap.LoadBitmap(IDB_BITMAP2); BITMAP bmp; bit ...
- Java第二周总结报告
第二周的学习,开始正式实践进行Java的学习. 本周做了什么? 了解的Java的一些基本知识,如Java变量,数据类型和运算符等.Java变量对不同的数据类型最好采用不同的命名规则,合理的命名有利于提 ...
- vue render 渲染函数
vue render 渲染函数 经常看到使用render渲染函数的示例,而且在一些特殊情况下,确实更好使用,可以更加有效地细分组件,因而借助vue-element-admin来学习一波 render函 ...
- sql server 幂运算函数power(x,y)、square(x)、exp(x)
--POWER(x,y)函数返回x的y次乘方的结果值 --SQUARE(x)函数返回指定浮点值x的平方 --EXP(x)函数返回e的x乘方后的值 示例:select POWER(2,2), POWER ...
- 正则表达式、原始字符串及re
正则表达式.原始字符串及re re是python中的一个文本解析工具,常用的方法有: 来源:https://www.ibm.com/developerworks/cn/opensource/os-cn ...