ros相机标定
没有经过校准的camera拍摄的图片是有畸变的.如下图:
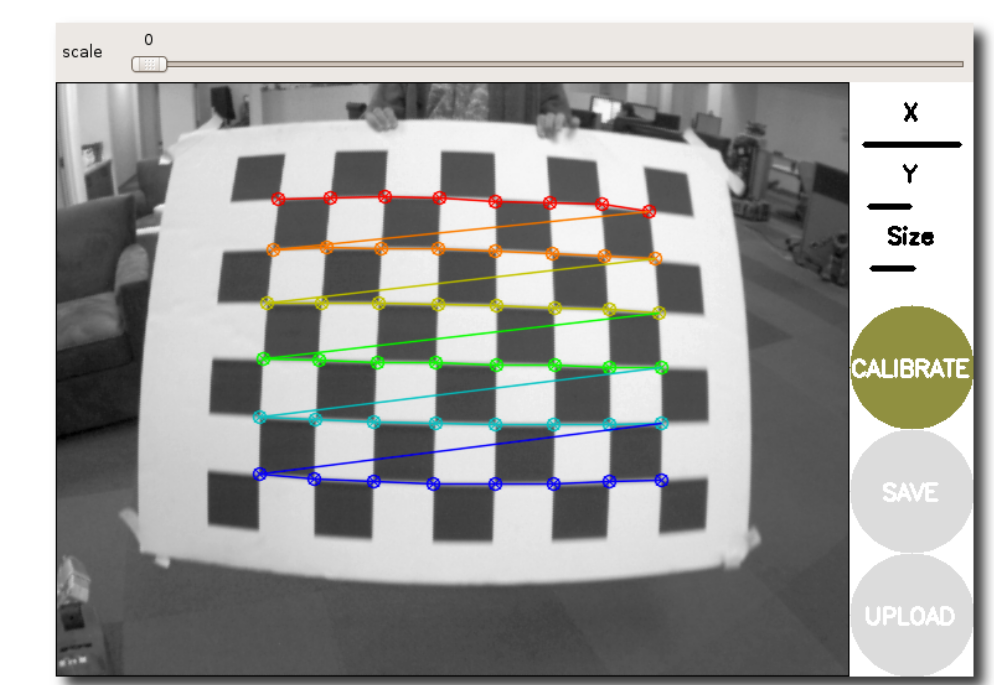
而我们希望得到的图片是这样的

ros中提供了一个程序camera_calibration帮助我们去做校准.
具体怎么校准参考
https://blog.csdn.net/xinwenfei/article/details/81235072
http://wiki.ros.org/camera_calibration/Tutorials/MonocularCalibration
首先是安装ros-kinetic-uvc-camera,运行就可以产生
/image_raw
/camera_info
两个topic. 再运行camera_calibration做校准.
校准完毕后会生成一个yaml文件
格式如下:
image_width: 2448
image_height: 2050
camera_name: prosilica
camera_matrix:
rows: 3
cols: 3
data: [4827.94, 0, 1223.5, 0, 4835.62, 1024.5, 0, 0, 1]
distortion_model: plumb_bob
distortion_coefficients:
rows: 1
cols: 5
data: [-0.41527, 0.31874, -0.00197, 0.00071, 0]
rectification_matrix:
rows: 3
cols: 3
data: [1, 0, 0, 0, 1, 0, 0, 0, 1]
projection_matrix:
rows: 3
cols: 4
data: [4827.94, 0, 1223.5, 0, 0, 4835.62, 1024.5, 0, 0, 0, 1, 0]
http://wiki.ros.org/camera_calibration_parsers 这是一个对校准文件做格式转换的程序
然后,调用摄像头驱动的程序去拍到图片的时候要去读取这个yaml文件,对拍到的图像做校准处理.这样得到的就是无畸变的图像了.
ros相机标定的更多相关文章
- 相机标定 matlab opencv ROS三种方法标定步骤(3)
三 , ROS 环境下 如何进行相机标定 刚开始做到的时候遇到一些问题没有记录下来,现在回头写的时候都是没有错误的结果了,首先使用ROS标定相机, 要知道如何查看节点之间的流程图 rosrun r ...
- 相机标定 matlab opencv ROS三种方法标定步骤(1)
一 . 理解摄像机模型,网上有很多讲解的十分详细,在这里我只是记录我的整合出来的资料和我的部分理解 计算机视觉领域中常见的三个坐标系:图像坐标系,相机坐标系,世界坐标系,实际上就是要用矩阵来表 示各个 ...
- 相机标定 matlab opencv ROS三种方法标定步骤(2)
二 ubuntu下Opencv的相机标定 一般直接用Opencv的源码就可以进行相机的标定,但是可能只是会实现结果,却不懂实现的过程,我也是模模糊糊的看了<计算机视觉中的多视图几何>以及 ...
- Opencv——相机标定
相机标定的目的:获取摄像机的内参和外参矩阵(同时也会得到每一幅标定图像的选择和平移矩阵),内参和外参系数可以对之后相机拍摄的图像就进行矫正,得到畸变相对很小的图像. 相机标定的输入:标定图像上所有内角 ...
- 相机标定简介与MatLab相机标定工具箱的使用(未涉及原理公式推导)
相机标定 一.相机标定的目的 确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,建立摄像机成像的几何模型,这些几何模型参数就是摄像机参数. 二.通用摄像机模型 世界坐标系.摄像机坐标 ...
- 相机标定:关于用Levenberg-Marquardt算法在相机标定中应用
LM算法在相机标定的应用共有三处. (1)单目标定或双目标定中,在内参固定的情况下,计算最佳外参.OpenCV中对应的函数为findExtrinsicCameraParams2. (2)单目标定中,在 ...
- OpenCV相机标定和姿态更新
原帖地址: http://blog.csdn.net/aptx704610875/article/details/48914043 http://blog.csdn.net/aptx704610875 ...
- 相机标定:kalibr标定工具箱使用总结
1 多相机标定 1.1采集图像和IMU 1.2制作Bag包 1)组织文件结构 ~/kalibr_workspace/test/stereo_calib bagsrc cam0 (1+time(0))* ...
- SLAM入门之视觉里程计(6):相机标定 张正友经典标定法详解
想要从二维图像中获取到场景的三维信息,相机的内参数是必须的,在SLAM中,相机通常是提前标定好的.张正友于1998年在论文:"A Flexible New Technique fro Cam ...
随机推荐
- 必威电竞2019或将赞助SKT,携手Faker再创辉煌
必威电竞yabo055点康母,这是一家相当优秀的竞技娱乐平台,平台涉及的领域也比较广泛,包括各类电子竞技游戏以及相关资讯,平台内有很多专家,每日为大家分享各类热门赛事等一些游戏攻略.现在的电子竞技发展 ...
- Bit Manipulation-leetcode
Bit Manipulation Find the Difference /* * Given two strings s and t which consist of only lowercase ...
- LeetCode 652: 寻找重复的子树 Find Duplicate Subtrees
LeetCode 652: 寻找重复的子树 Find Duplicate Subtrees 题目: 给定一棵二叉树,返回所有重复的子树.对于同一类的重复子树,你只需要返回其中任意一棵的根结点即可. 两 ...
- JS获取url请求参数
JS获取url请求参数,代码如下: // 获取url请求参数 function getQueryParams() { var query = location.search.substring(1) ...
- App 自动化框架设计思路
最近在整理和学习Appium+Java 自动化框架,对APP自动化框架的部分设想参考了一些文章,先进行整理下: 框架的思路一: 思考引入:https://www.cnblogs.com/yunfeio ...
- python del和垃圾回收
1. del是删除对象 2. python中的垃圾回收是删除引用计数
- Java题库——Chapter10 面向对象思考
1)You can declare two variables with the same name in ________. 1) _______ A)a method one as a forma ...
- RabbitMQ与Spring的框架整合之Spring Boot实战
1.RabbitMQ与Spring的框架整合之Spring Boot实战. 首先创建maven项目的RabbitMQ的消息生产者rabbitmq-springboot-provider项目,配置pom ...
- 阿里面试实战题1----TreeSet,HashSet 区别
TreeSet,HashSet 区别 TreeSet public class TreeSet<E> extends AbstractSet<E> implements Nav ...
- C#爬虫例子
公司需要抓取新闻,每次手动复制粘贴新闻,太麻烦了,业务人员就提出了要求,需要程序实现自动抓取新闻,因此就写了这个简单的爬虫程序. Html Agility Pack库 这是一个.NET下的HTML解析 ...