RAFT光流估计
RAFT Introduction
RAFT: Recurrent All-Pairs Field Transforms for Optical Flow;观其名便知道这是一篇关于光流估计的论文。
模型介绍
为了方便理解和阅读,我写了两个版本:
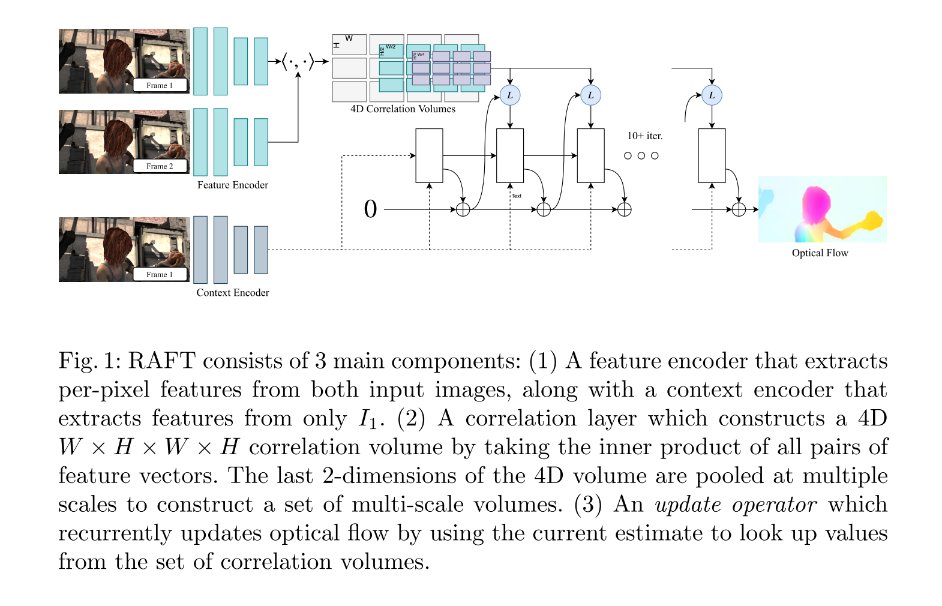
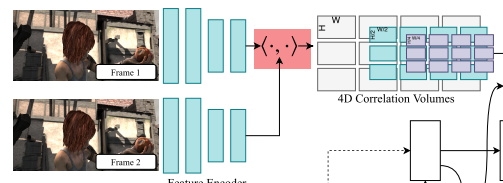
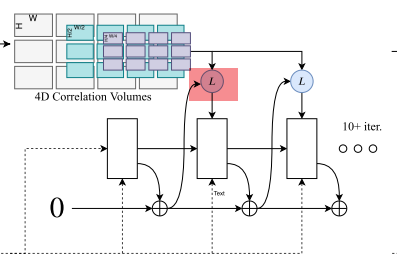
先是一个网络\(Net_1\)提取两张输入\(I_1,I_2\)的特征(左上角),还有另一个网络\(Net_2\)再提取一次\(I_1\)的特征(左下角),然后通过一个
correlation layer接收\(Net_1\)的输出并建立两张图片的相似度向量。最后作者使用了自然语言处理中GRU的思想,把相似度向量,每一次迭代预测出的光流,以及\(Net_2\)的输出三者作为输入去迭代着更新光流。RAFT由三部分组成:(1)一个
feature encoder提取两张输入图片\(I_1,I_2\)在每个像素点上的特征。这里我们假设\(I_1,I_2\)的尺寸是\(H \times W\),那么经过feature encoder之后得到的特征维度就是\(H \times W \times D\);此外还有一个context encoder提取\(I_1\)的特征,也就是图片的左下角。(2)一个correlation layer负责把\(I_1,I_2\)的特征向量通过点乘的方式连接起来,那么最终输出的是一个\(H \times W \times H \times W\)的向量,此向量表示\(I_1\)每一个像素点与所有\(I_2\)像素点的相关度。然后作者也考虑到这样的表示可能比较稀疏,因此在这个输出之后做了四层的池化,并将每一层池化的输出连接起来做成了一个具有多尺度特征的相似性变量。(3)一个update operator,通过使用一个look up方法(查看4D Correlation Voulumes的值)迭代着去更新光流。当然第三点需要下面的详细介绍。
将模型拆解一下:
- 两次特征抽取

这个比较好理解,就不多说了。
Correlation Layer
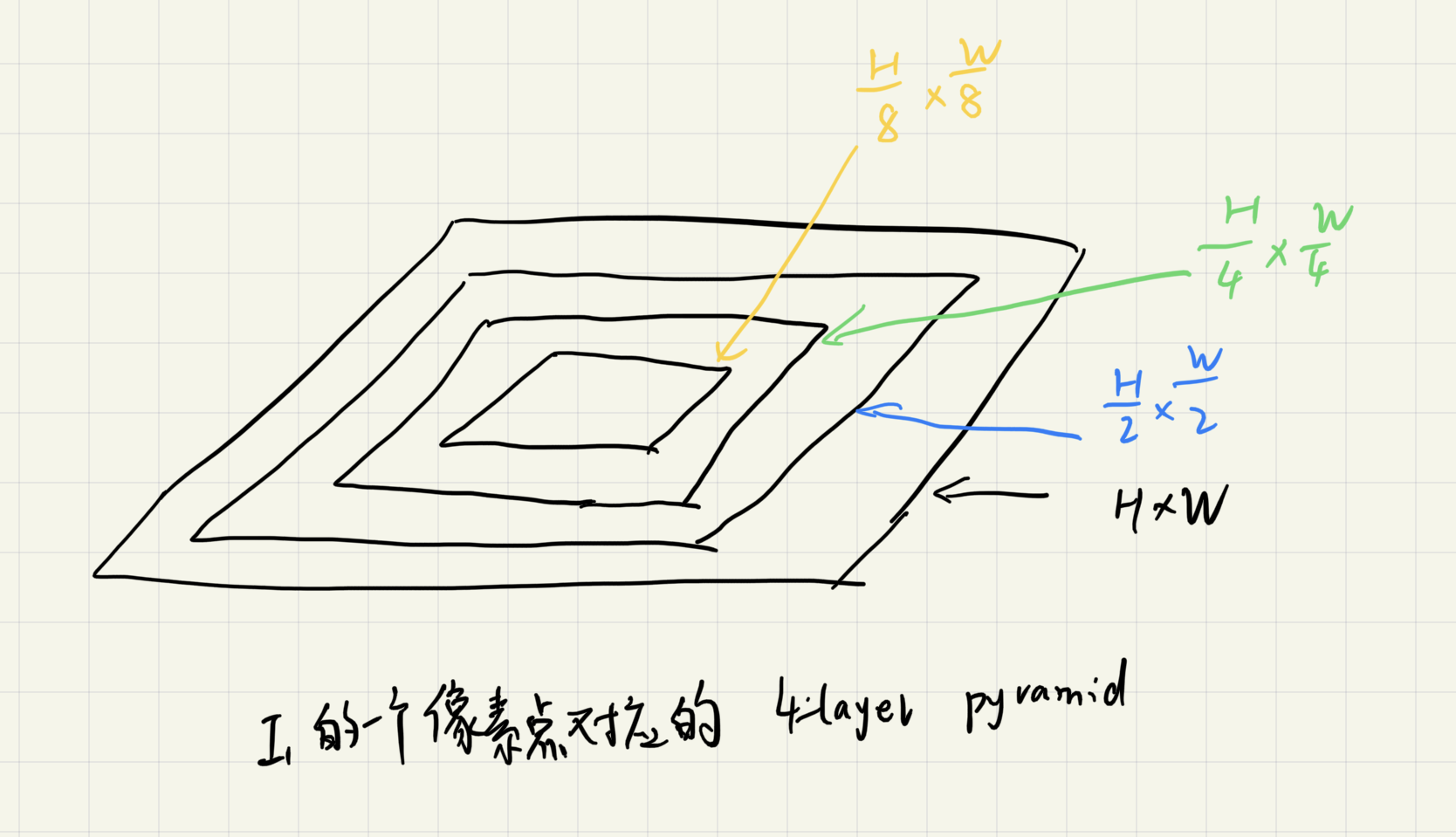
这里我们得到了\(I_1\)对\(I_2\)上的多尺度4D Correlation Voulumes,那么这个值是怎么得到的,又代表什么意义呢?前面我们提到过,我们得到\(H \times W \times H \times W\)的向量之后,作者觉得这样比较稀疏,因为\(I_1\)不可能与\(I_2\)所有的像素点相关,所以作者又将这个向量进行了四层池化:
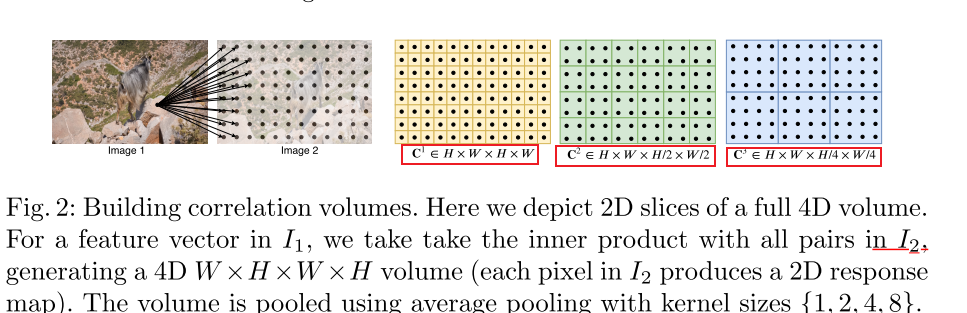
得到了如图所示的3层向量(第四层没画出来,也就是\(H \times W \times {H\over8} \times {W\over8}\)),将他们叠在一起,就构成了一个多尺度的相似性向量的金字塔。

- Look up
在这个L里,作者做了一件有趣的事情,我们知道,光流\((f^1 , f^2 )\)表达了这样一件事情, 它可以把\(I_1\)上的每一个像素\(x(u,v)\)通过$ x'=(u+ f^ {1} (u),v+ f^ {2} (v)) $与 \(I_2\)上对应像素\(x'\)建立映射。然后作者在\(x'\)附近构造了一个网格:
\]
\(r\)超参数是超参数,有点类似于圆的半径,\(d_x\)是整数,通过这个公式把\(x'\)附近的值拿到,同时这个操作会在每一层的金字塔上取值,最后将这些得到的值串联成一个向量。这个向量也就是 Look up的输出。总结一下就是光流建立了\(I_1\)的像素点到\(I_2\)像素点的映射,然后使用对应的\(I_2\)点的坐标,在对应的相似性向量的金字塔上采样得到一个输出向量。那么大胆猜测一下,对于快速移动的物体,\(r\)设置的偏大一些,效果应该更好;对于移动较慢的无题,\(r\)设置的应该偏小一些。当然这个也是Coupled Iterative Refinement for 6D Multi-Object Pose Estimation,标题中论文沿用的一个方法。
update operator
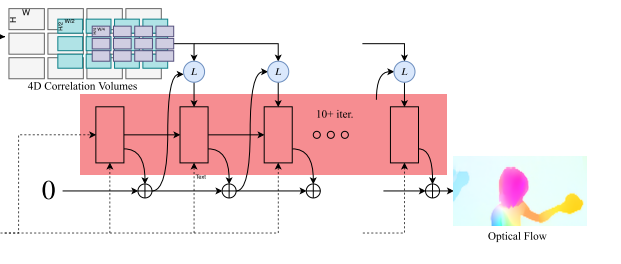
这个类似于GRU模型的结构,把context features以及Look up输出的向量(通过flow和correlation pyraid得到)作为输入\(x_t\),以及hidden state作为 \(h_{t-1}\)作为输入,然后输出\(\Delta \mathrm{f}\)和更新后的的hidden state\(h_t\)。GRU的内部结构是这样定义的:
z_t &=\sigma\left(\operatorname{Conv}_{3 \times 3}\left(\left[h_{t-1}, x_t\right], W_z\right)\right) \\
r_t &=\sigma\left(\operatorname{Conv}_{3 \times 3}\left(\left[h_{t-1}, x_t\right], W_r\right)\right) \\
\tilde{h}_t &=\tanh \left(\operatorname{Conv}_{3 \times 3}\left(\left[r_t \odot h_{t-1}, x_t\right], W_h\right)\right) \\
h_t &=\left(1-z_t\right) \odot h_{t-1}+z_t \odot \tilde{h}_t
\end{aligned}
\]
- loss function
\]
作者使用的并不只是最后的输出,而是update operator每一次迭代的光流输出\(\left\{\mathbf{f}_1, \ldots, \mathbf{f}_N\right\}\),去跟\(f_{gt}\)求loss。
\(gamma=0.9\)
最后再简单看一组对比结果:
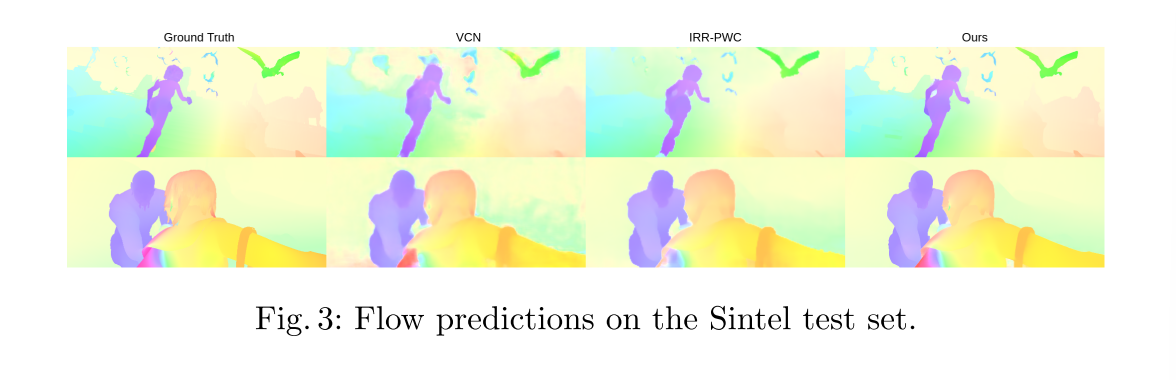
至此我们介绍完了RAFT的相关方法。
RAFT光流估计的更多相关文章
- 机器学习进阶-光流估计 1.cv2.goodFeaturesToTrack(找出光流估计所需要的角点) 2.cv2.calcOpticalFlowPyrLK(获得光流检测后的角点位置) 3.cv2.add(进行像素点的加和)
1.cv2.goodFeaturesToTrack(old_gray, mask=None, **feature_params) 用于获得光流估计所需要的角点参数说明:old_gray表示输入图片, ...
- 目标跟踪之Lukas-Kanade光流法
转载自:http://blog.csdn.net/u014568921/article/details/46638557 光流是图像亮度的运动信息描述.光流法计算最初是由Horn和Schunck于19 ...
- 光流法详解之一(LK光流)
Lucas–Kanade光流算法是一种两帧差分的光流估计算法.它由Bruce D. Lucas 和 Takeo Kanade提出 [1]. LK光流法有三个假设条件: 1. 亮度恒定:一个像素点随着时 ...
- 快速稀疏角点光流框架(Fast sparse corner optical flow framework)
光流适用在连续的图像系列(视频流)中,描述本身或画面目标的运动状态:在目标跟踪.运动分析.甚至slam中都有广泛应用. opencv里就有不少光流算法,其中很经典也是当前被调用最多的的Lucas-Ka ...
- 【Matlab】运动目标检测之“光流法”
光流(optical flow) 1950年,Gibson首先提出了光流的概念,所谓光流就是指图像表现运动的速度.物体在运动的时候之所以能被人眼发现,就是因为当物体运动时,会在人的视网膜上形成一系列的 ...
- 目标跟踪之Lukas-Kanade光流法(转)
光流是图像亮度的运动信息描述.光流法计算最初是由Horn和Schunck于1981年提出的,创造性地将二维速度场与灰度相联系,引入光流约束方程,得到光流计算的基本算法.光流计算基于物体移动的光学特性提 ...
- Lucas–Kanade光流算法学习
Lucas–Kanade光流算法是一种两帧差分的光流估计算法.它由Bruce D. Lucas 和 Takeo Kanade提出. 光流(Optical flow or optic f ...
- 3D深度估计
3D深度估计 Consistent Video Depth Estimation 论文地址:https://arxiv.org/pdf/2004.15021.pdf 项目网站:https://roxa ...
- o(1)复杂度之双边滤波算法的原理、流程、实现及效果。
一.引言 双边滤波在图像处理领域中有着广泛的应用,比如去噪.去马赛克.光流估计等等,最近,比较流行的Non-Local算法也可以看成是双边滤波的一种扩展.自从Tomasi et al等人提出该 ...
- CV界的明星人物们
CV界的明星人物们 来自:http://blog.csdn.net/necrazy/article/details/9380151,另外根据自己关注的地方,加了点东西. 今天在cvchina论坛上看到 ...
随机推荐
- IM跨平台技术学习(七):得物基于Electron开发客服IM桌面端的技术实践
本文由得物技术团队Uni分享,即时通讯网收录时有内容修订和排版优化. 一.引言 本文要分享的是得物技术团队基于Electron开发客服IM桌面端的技术实践过程,内容包括桌面技术选型.Electron的 ...
- MSM8953/SDM450 去PMI的USB3.0 TYPE-C Micro USB OTG功能适配
提前说明一下有哪些"坑". 1.PM8953 GPIO_8的TZ权限 2.PM8953 GPIO_8寄存器的写入保护 3.去掉高通默认的ID检测 4.增加dwc3的ID检测 5.增 ...
- 前端学习openLayers配合vue3(获取矢量图的个数,省份的个数)
矢量图层绘制了一个中国地图,我们获取一下矢量图层的个数 关键代码 map .getLayers()//获取所有图层 .item(1)//获取矢量图层 .getSource() .on("ch ...
- 使用Docker部署的基于binlog实现Mysql8
概念 MySQL 基于 Binlog 的主从复制(Master-Slave Replication)是 MySQL 数据库中实现数据复制的一种机制.在这种复制模式下,主库(Master)记录所有对数据 ...
- 前端实现 HTML 网页转 PDF 并导出🤓
有个新需求,当点击[下载]按钮时,直接将当前 html页面下载为 PDF.通过 html2canvas + jsPDF 可实现PDF单页下载,甚至是多页下载,记录分享一下~ 最后有源码,可自取 htm ...
- kafka的server.properties文件描述
版本:基于 kafka 2.4.0 http://archive.apache.org/dist/kafka/2.4.0/kafka_2.11-2.4.0.tgz # Licensed to the ...
- 轮播图,swiper使用
背景: 最近接到一个需求,重写首页,需要用到轮播图. 但是轮播图只用两张图,此为前提. 本想直接用ElementUI的走马灯,但是只用两张图的情况下,走马灯不能循环播放,只能来回播放,公司的UI小姐姐 ...
- LESLIE NOTE ——你的笔记只属于你自己
LESLIE NOTE 网站:http://www.leslienote.com 简介: [只有数据可控,才是最放心的] [只有多多备份,才是最安全的] LESLIE NOTE 是一款本地笔记软件, ...
- FastReport实现遍历Dataset数据集计算
delphi在使用fastreport进行打印时,需要对数据进行计算求和. 在打印文本框的OnBeforePrint事件中进行以下代码即可实现效果 procedure Memo7OnBeforePri ...
- 天翼云加速落地紫金DPU实践应用,让算力供给更高效!
近日,以"智驱创新·芯动未来"为主题的第三届DPU峰会在北京成功举办.会上,天翼云凭借紫金DPU在架构革新.算力释放.场景落地等多方面的成果,荣膺"2023芯星品牌奖&q ...