【探索之路】机器人篇(4)-根据3D文件来优化自己的机器人模型
此章节不是必须做的!!!!
因为我已经用solidworks画了机器人的3D模型,那我就直接导入已经画好的三维模型。
如果大家没有画也是可以直接使用上一章节我们已经构建的机器人模型。我这里只是一个对显示的优化,不会影响后续功能的测试。
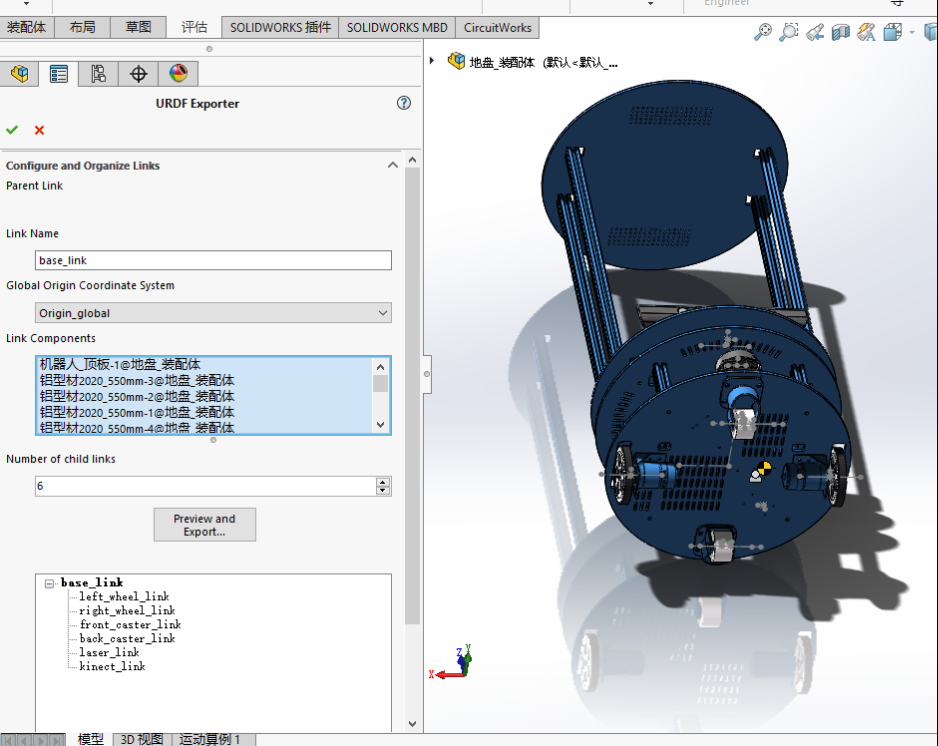
我们之前已经画好了三维模型,那么我们如何将solidworks中的模型导入到urdf中呢?我在百度上查到了solidworks有一个插件(sw2urdfSetup.exe),可以直接将三维模型生成ros的package。这个插件是ros提供的,但是在生成的package中有些配置是提供的模板,直接编译会报错,需要略微修改一下,具体修改教程我们可以搜索一下。
博文:【ROS学习】Solidworks模型转化为URDF文件格式+三连杆机械臂示例+逆运动学
这里我提醒一下,我使用的是solidworks 2017版。在上面的博文中,插件的file是在菜单栏中,而在我的软件中却在工具的标签下,这里需要注意一下。
而且在我实际的测试中,发现转轴可以不手动设置,它能自己识别并添加,但最好加上联动的方式,这样才能更好的识别。自动生成的坐标系的基准点有点儿乱,可以在软件自动生成之后手动修改一下。
在生成的ros的package中,发现urdf加载的stl模型文件,但是注意,这里的stl文件是通过sw2urdfSetup.exe插件生成的,如果直接将三维图像保存为STL格式的话是无法正常显示的。
我们可以看一下在solidworks中的界面。我刚刚重新对万向轮的3D图纸做了一下优化。

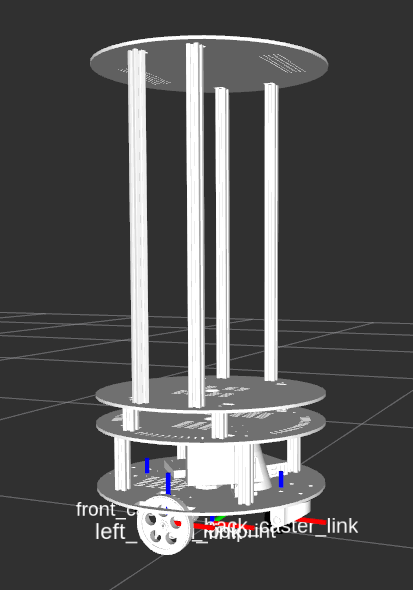
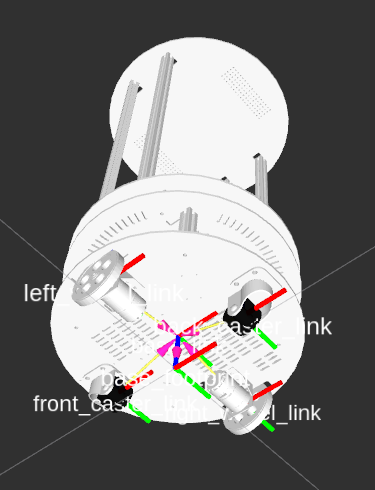
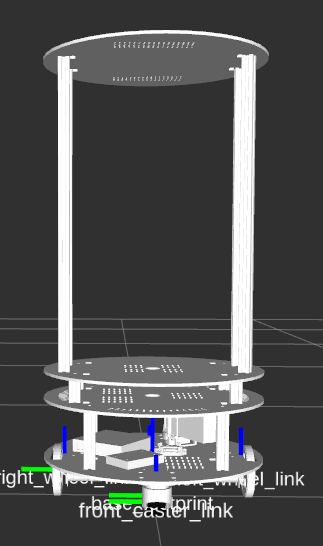
我们也可以在rviz中看一下效果。
目前,此版本的机械图纸和代码已经上传保存,编号是V4.
【探索之路】机器人篇(4)-根据3D文件来优化自己的机器人模型的更多相关文章
- 【探索之路】机器人篇(5)-Gazebo物理仿真环境搭建_让机器人运动起来
如果完成了前两步,那么其实我们已经可以去连接我们的现实中的机器人了. 但是,做机器人所需要的材料还没有到,所以我们这里先在电脑平台上仿真一下.这里我们用到的就算gazebo物理仿真环境,他能很好的和R ...
- 【探索之路】机器人篇(1)-ROS-mwRobot开篇
机器人的定义 首先,什么才是机器人?机器人是不是必须和人一样的外形?我们先看一看维基百科给机器人的定义: 由上可见,机器人并不是和人一样的外形,而是可以模拟人类行为或者思想再或者是模拟其他生物的机械. ...
- 【探索之路】机器人篇(3)-给mwRobot建立模型
在创建一个mwRobot_description程序包那一节中,我们添加了依赖roscpp rospy std_msgs 和 urdf , 现在我们再添加一个xacro依赖. 如何添加依赖? 打开程 ...
- 微服务探索之路02篇liunx ubuntu服务器部署k8s(kubernetes)-kubernetes/dashboard
本章介绍所需环境:ubuntu18.04,建立在上一篇微服务探索之路01篇已经安装了docker的基础上. 1 替换k8s镜像源为国内镜像 进入目录 cd /etc/apt/sources.list. ...
- 微服务探索之路03篇-docker私有仓库Harbor搭建+Kubernetes(k8s)部署私有仓库的镜像
❝ 目录: 微服务探索之路01篇.net6.0项目本地win10系统docker到服务器liunx系统docker的贯通 微服务探索之路02篇liunx ubuntu服务器部署k8s(kubernet ...
- 解剖SQLSERVER 第十六篇 OrcaMDF RawDatabase --MDF文件的瑞士军刀(译)
解剖SQLSERVER 第十六篇 OrcaMDF RawDatabase --MDF文件的瑞士军刀(译) http://improve.dk/orcamdf-rawdatabase-a-swiss-a ...
- Unity 3D 文件导入出错
Unity 3D 文件导入出错 安装unity 时我选择了free版的,打开已有项目时出现例如以下错误提示 解决的方法: 先把要导入的文件先复制到unity3d安装文件夹下相应的文件夹内,之后再返回u ...
- Linux入门篇(三)——文件与目录
这一系列的Linux入门都是本人在<鸟哥的Linux私房菜>的基础上总结的基本内容,主要是记录下自己的学习过程,也方便大家简要的了解 Linux Distribution是Ubuntu而不 ...
- (代码篇)从基础文件IO说起虚拟内存,内存文件映射,零拷贝
上一篇讲解了基础文件IO的理论发展,这里结合java看看各项理论的具体实现. 传统IO-intsmaze 传统文件IO操作的基础代码如下: FileInputStream in = new FileI ...
随机推荐
- 蒲公英 · JELLY技术周刊 Vol.32: 前端的自我进化之路
蒲公英 · JELLY技术周刊 Vol.32 前端开发不过是切图仔在那儿瞎鼓捣,没啥门槛,不需要懂计算机原理,不需要懂算法,微服务.高并发这些都不需要懂,拖组件写个页面就好了,数据.逻辑.测试都可以交 ...
- 以前一个个文件删数据的我,今天终于找到了释放C盘空间的办法
这是我刚刚清理的C盘,亲测有效!无需安装清理空间的软件,我的电脑品牌是华硕. win10的电脑应该都有搜索功能,如果没有开启,可以鼠标右键点击任务栏. 弹出菜单找到[搜索]-[显示搜索图标],勾选即可 ...
- 建立sa用户登录
Sa用户是SQL Server的超级管理员用户,由于该用户的特殊性,往往容易成为被攻击的漏洞对象,因此建议不要轻易启动该用户.下面讲述如何以Sa用户的身份登录当前的SQL Server系统. 第一步: ...
- Leetcode学习笔记(4)
题目1 ID121 给定一个数组,它的第 i 个元素是一支给定股票第 i 天的价格. 如果你最多只允许完成一笔交易(即买入和卖出一支股票),设计一个算法来计算你所能获取的最大利润. 注意你不能在买入股 ...
- 混合云存储打开的正确姿势——腾讯云存储网关 CSG
近年来,随着云计算的发展,越来越多的企业选择将IT系统基础设施转移到云上,上云有助于推动企业加快信息化.数字化.智能化的转型,但是很多企业对传统的业务系统依赖程度较高,短时间内将业务迁移上云将会面临很 ...
- 应用案例——高并发 WEB 服务器队列的应用
在高并发 HTTP 反向代理服务器 Nginx 中,存在着一个跟性能息息相关的模块 - 文件缓存. 经常访问到的文件会被 nginx 从磁盘缓存到内存,这样可以极大的提高 Nginx 的并发能力,不过 ...
- STL—— 容器(vector)的数据写入、修改和删除
1. 通过 push_back() 尾部增加一个元素 : vector 可以通过 "push_back " 写入数据,通过 push_back 可以将数据直接写入至 vector ...
- Linux下网卡配置多个IP
ip addr add 192.168.12.4/24 dev eno16777728但是每次重启会失效 如果希望每次重启会重新绑定IP,可以将:ip addr add 192.168.12.X/24 ...
- Linux修改系统时间为东八区北京时间(上海时间)
1. Linux时间 Linux的时间分为 System Clock(系统时间)和 Real Time Clock(硬件时间,简称RTC). 系统时间:指系统内核中的时间. 硬件时间:指主 ...
- IOS实现自动定位和手动选择城市功能
IOS自动定位使用的是高德地图SDK 在高德开放平台http://lbs.amap.com/api/ios-sdk/down/ 下载2D地图SDK和搜索SDK 将SDK导入工程内 按照高德的配置说明进 ...