VAE论文学习
intractable棘手的,难处理的 posterior distributions后验分布 directed probabilistic有向概率
approximate inference近似推理 multivariate Gaussian多元高斯 diagonal对角 maximum likelihood极大似然
参考:https://blog.csdn.net/yao52119471/article/details/84893634
VAE论文所在讲的问题是:
我们现在就是想要训练一个模型P(x),并求出其参数Θ:
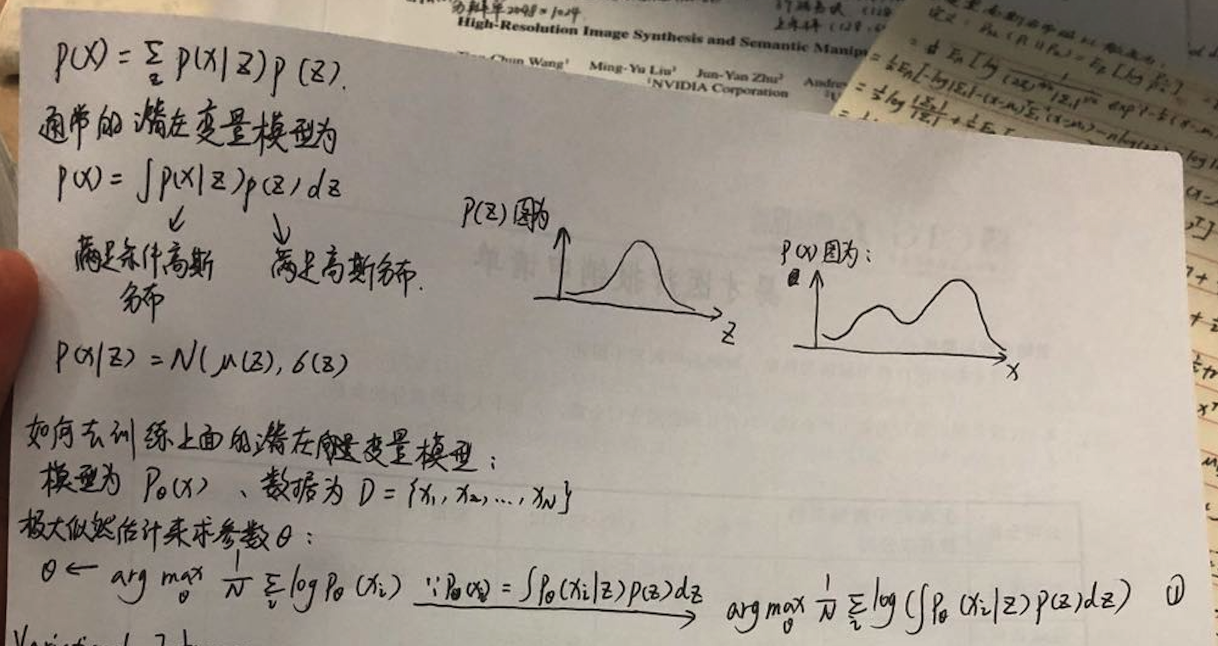
通过极大似然估计求其参数
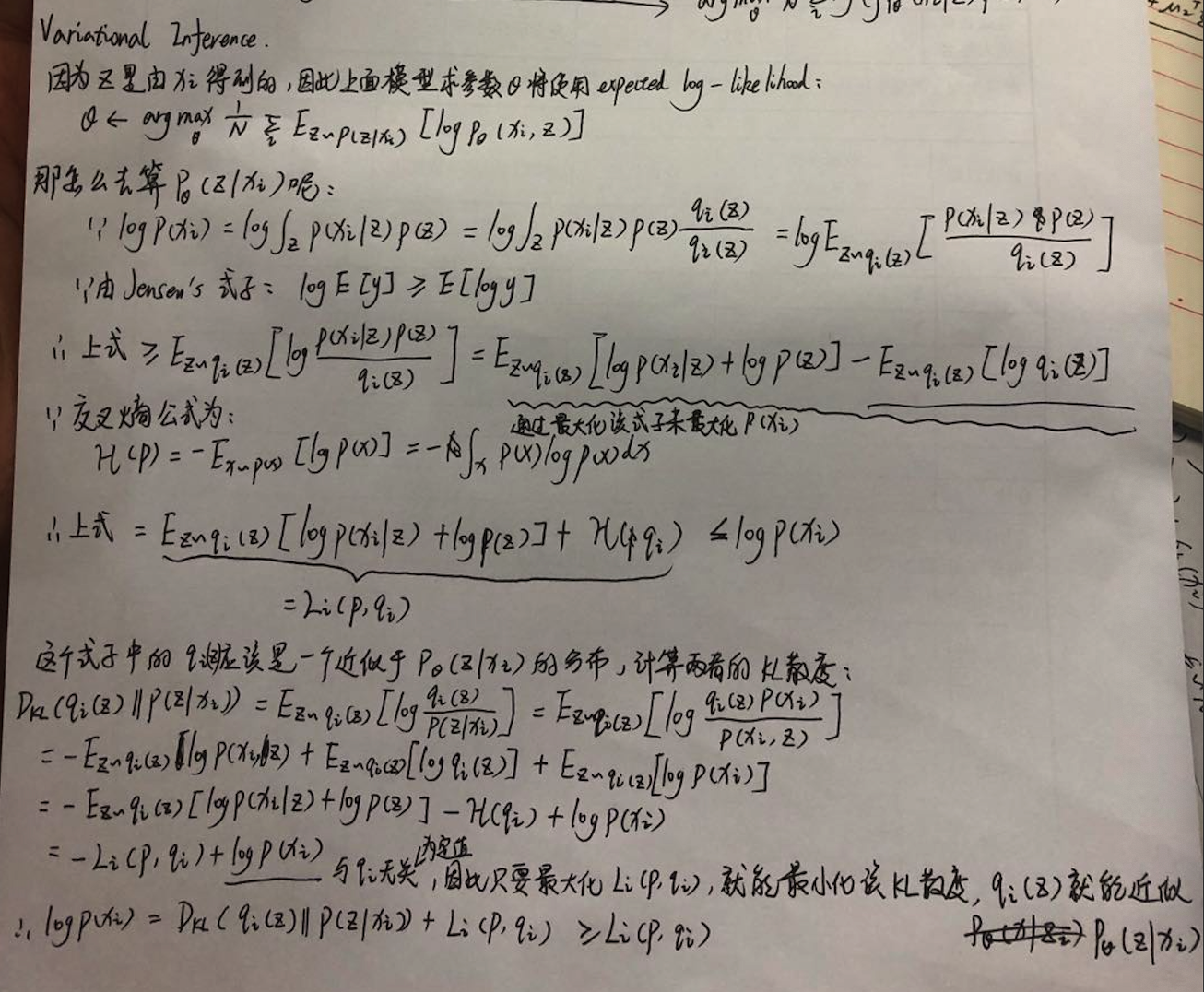
Variational Inference
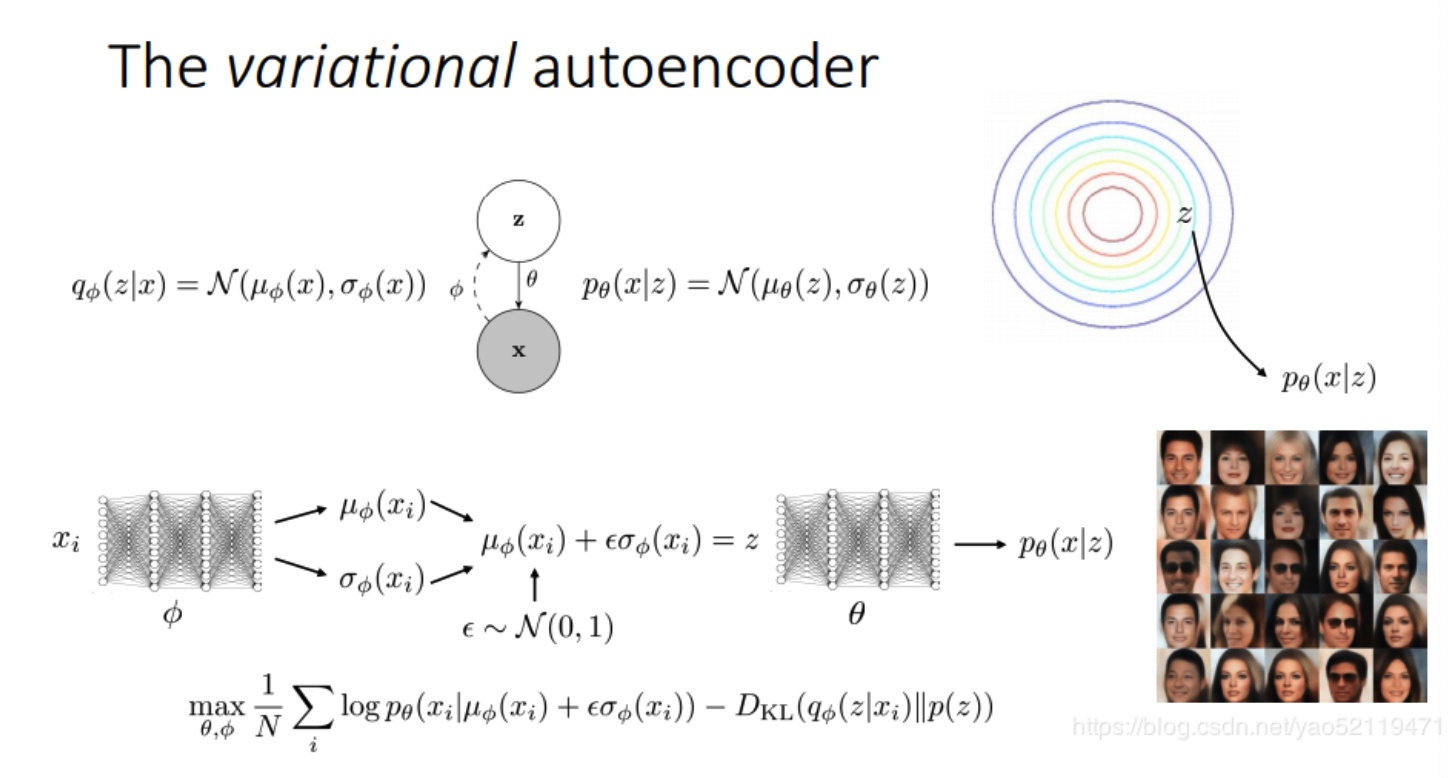
在论文中P(x)模型会被拆分成两部分,一部分由数据x生成潜在向量z,即pθ(z|X);一部分从z重新在重构数据x,即pθ(X|z)
实现过程则是希望能够使用一个qΦ(z|X)模型去近似pθ(z|X),然后作为模型的Encoder;后半部分pθ(X|z)则作为Decoder,Φ/θ表示参数,实现一种同时学习识别模型参数φ和参数θ的生成模型的方法,推导过程为:
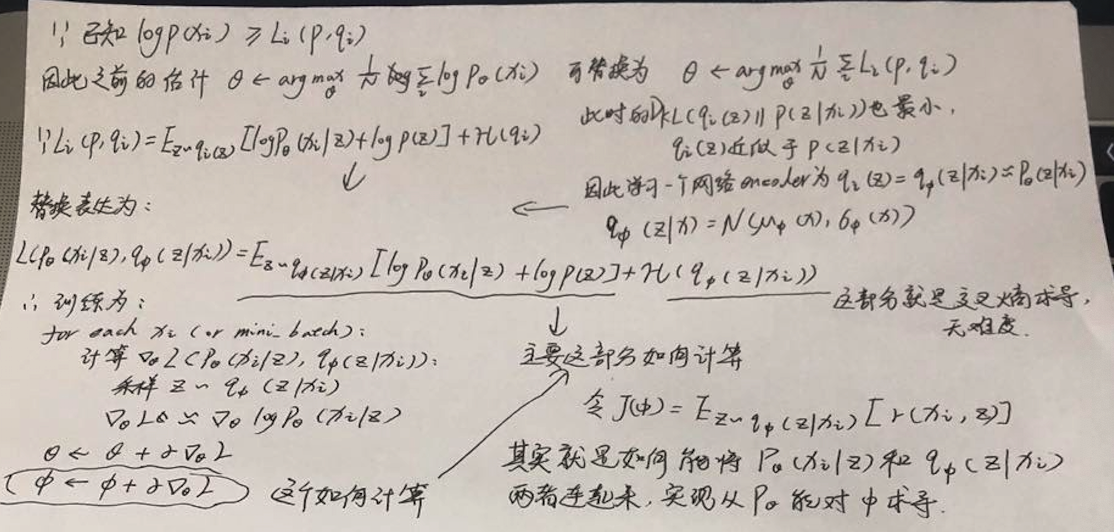
现在问题就在于怎么进行求导,因为现在模型已经不是一个完整的P(x) = pθ(z|X) + pθ(X|z),现在变成了P(x) = qΦ(z|X) + pθ(X|z),那么如果对Φ求导就会变成一个问题,因此论文中就提出了一个reparameterization trick方法:

取样于一个标准正态分布来采样z,以此将qΦ(z|X) 和pθ(X|z)两个子模型通过z连接在了一起
最终的目标函数为:
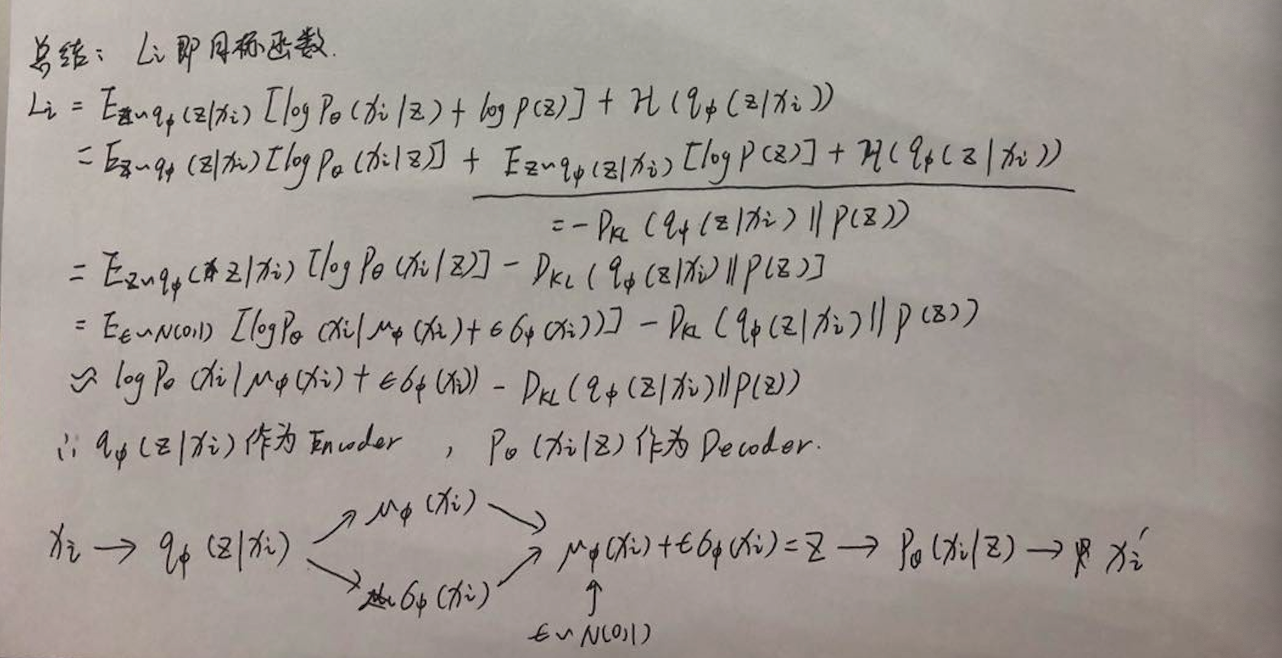
因此目标函数 = 输入和输出x求MSELoss - KL(qΦ(z|X) || pθ(z))
在论文上对式子最后的KL散度 -KL(qΦ(z|X) || pθ(z))的计算有简化为:

多维KL散度的推导可见:KL散度
假设pθ(z)服从标准正态分布,采样ε服从标准正态分布满足该假设
简单代码实现:
import torch
from torch.autograd import Variable
import numpy as np
import torch.nn.functional as F
import torchvision
from torchvision import transforms
import torch.optim as optim
from torch import nn
import matplotlib.pyplot as plt class Encoder(torch.nn.Module):
def __init__(self, D_in, H, D_out):
super(Encoder, self).__init__()
self.linear1 = torch.nn.Linear(D_in, H)
self.linear2 = torch.nn.Linear(H, D_out) def forward(self, x):
x = F.relu(self.linear1(x))
return F.relu(self.linear2(x)) class Decoder(torch.nn.Module):
def __init__(self, D_in, H, D_out):
super(Decoder, self).__init__()
self.linear1 = torch.nn.Linear(D_in, H)
self.linear2 = torch.nn.Linear(H, D_out) def forward(self, x):
x = F.relu(self.linear1(x))
return F.relu(self.linear2(x)) class VAE(torch.nn.Module):
latent_dim = def __init__(self, encoder, decoder):
super(VAE, self).__init__()
self.encoder = encoder
self.decoder = decoder
self._enc_mu = torch.nn.Linear(, )
self._enc_log_sigma = torch.nn.Linear(, ) def _sample_latent(self, h_enc):
"""
Return the latent normal sample z ~ N(mu, sigma^)
"""
mu = self._enc_mu(h_enc)
log_sigma = self._enc_log_sigma(h_enc) #得到的值是loge(sigma)
sigma = torch.exp(log_sigma) # = e^loge(sigma) = sigma
#从均匀分布中取样
std_z = torch.from_numpy(np.random.normal(, , size=sigma.size())).float() self.z_mean = mu
self.z_sigma = sigma return mu + sigma * Variable(std_z, requires_grad=False) # Reparameterization trick def forward(self, state):
h_enc = self.encoder(state)
z = self._sample_latent(h_enc)
return self.decoder(z) # 计算KL散度的公式
def latent_loss(z_mean, z_stddev):
mean_sq = z_mean * z_mean
stddev_sq = z_stddev * z_stddev
return 0.5 * torch.mean(mean_sq + stddev_sq - torch.log(stddev_sq) - ) if __name__ == '__main__': input_dim = *
batch_size = transform = transforms.Compose(
[transforms.ToTensor()])
mnist = torchvision.datasets.MNIST('./', download=True, transform=transform) dataloader = torch.utils.data.DataLoader(mnist, batch_size=batch_size,
shuffle=True, num_workers=) print('Number of samples: ', len(mnist)) encoder = Encoder(input_dim, , )
decoder = Decoder(, , input_dim)
vae = VAE(encoder, decoder) criterion = nn.MSELoss() optimizer = optim.Adam(vae.parameters(), lr=0.0001)
l = None
for epoch in range():
for i, data in enumerate(dataloader, ):
inputs, classes = data
inputs, classes = Variable(inputs.resize_(batch_size, input_dim)), Variable(classes)
optimizer.zero_grad()
dec = vae(inputs)
ll = latent_loss(vae.z_mean, vae.z_sigma)
loss = criterion(dec, inputs) + ll
loss.backward()
optimizer.step()
l = loss.data[]
print(epoch, l) plt.imshow(vae(inputs).data[].numpy().reshape(, ), cmap='gray')
plt.show(block=True)
VAE论文学习的更多相关文章
- Faster RCNN论文学习
Faster R-CNN在Fast R-CNN的基础上的改进就是不再使用选择性搜索方法来提取框,效率慢,而是使用RPN网络来取代选择性搜索方法,不仅提高了速度,精确度也更高了 Faster R-CNN ...
- 《Explaining and harnessing adversarial examples》 论文学习报告
<Explaining and harnessing adversarial examples> 论文学习报告 组员:裴建新 赖妍菱 周子玉 2020-03-27 1 背景 Sz ...
- 论文学习笔记 - 高光谱 和 LiDAR 融合分类合集
A³CLNN: Spatial, Spectral and Multiscale Attention ConvLSTM Neural Network for Multisource Remote Se ...
- Apache Calcite 论文学习笔记
特别声明:本文来源于掘金,"预留"发表的[Apache Calcite 论文学习笔记](https://juejin.im/post/5d2ed6a96fb9a07eea32a6f ...
- FactorVAE论文学习-1
Disentangling by Factorising 我们定义和解决了从变量的独立因素生成的数据的解耦表征的无监督学习问题.我们提出了FactorVAE方法,通过鼓励表征的分布因素化且在维度上独立 ...
- GoogleNet:inceptionV3论文学习
Rethinking the Inception Architecture for Computer Vision 论文地址:https://arxiv.org/abs/1512.00567 Abst ...
- IEEE Trans 2008 Gradient Pursuits论文学习
之前所学习的论文中求解稀疏解的时候一般采用的都是最小二乘方法进行计算,为了降低计算复杂度和减少内存,这篇论文梯度追踪,属于贪婪算法中一种.主要为三种:梯度(gradient).共轭梯度(conjuga ...
- Raft论文学习笔记
先附上论文链接 https://pdos.csail.mit.edu/6.824/papers/raft-extended.pdf 最近在自学MIT的6.824分布式课程,找到两个比较好的githu ...
- 论文学习-系统评估卷积神经网络各项超参数设计的影响-Systematic evaluation of CNN advances on the ImageNet
博客:blog.shinelee.me | 博客园 | CSDN 写在前面 论文状态:Published in CVIU Volume 161 Issue C, August 2017 论文地址:ht ...
随机推荐
- java基础(8)---接口和lambda
一.接口 接口定义: 接口抽象方法定义: 二.接口实现类的定义.创建.调用 接口需要一个实现类. 接口实现类的定义: 接口实现类的创建和调用: 接口的好处: 不好的写法: 推荐的写法: 接口实 ...
- 【OI备忘录】trick汇总帖
OI中的那些实用的小trick 在OI中,我们时常会用到一些小技巧,无论是代码方面还是数学方面抑或是卡常,都有很多不错的小技巧. 鄙人不才,往往没办法想出来,于是就有了这篇汇总帖~ 如有疏漏,还请da ...
- navicat连接oracle报错:ORA-12737 Instant Client Light:unsupported server character set ZHS16GBK
今天使用Navicat连接Oracle数据库,报了下面的这个错误:“ORA-12737 Instant Client Light:unsupported server character set ZH ...
- 接口中的JSON报文
原始报文: 请求报文: [ { "appNo" : "", "applicantCredentialCode" : "" ...
- C++面向程序设计(第二版)课后习题答案解析
最近没什么心情整理零散的知识点,就整理一下第四章的课后习题答案. 1.定义一个复数类Complex,重载运算符“+”,使之能用于复数的加法运算.将运算符函数重载为非成员函数,非友元的普通函数.编程序, ...
- commons-dbutils工具栏的编写
db.properties driverClass=com.mysql.jdbc.Driver url=jdbc:mysql://localhost:3306/test_db?useUnicode=t ...
- Codeforces Round #604 (Div. 2) D. Beautiful Sequence(构造)
链接: https://codeforces.com/contest/1265/problem/D 题意: An integer sequence is called beautiful if the ...
- YAML_14 tags给指定的任务定义一个调用标识,以后不用重复整个过程,只需要执行tags标签的部分
ansible]# vim adhttp.yml --- - hosts: cache remote_user: root tasks: - copy: src: /r ...
- FTP与HTTP上传文件的对比
许多站点,比如facebook或一些博客等都允许用户上传或下载文件,比如论坛或博客系统的图片. 在这种情况下,通常有两种选择上传文件到服务器,那就是FTP协议和HTTP协议. 以下列出了一些两者的不同 ...
- noi.ac #30 思维
\(des\) 给定升序数组 \(A, B\) 对于任意两个集合 \(a, b\) 分别是 \(A, B\) 的子集,总价值为较小的集合的和, 总代价为 \((|a| + |b|) \times w\ ...