VisionPro学习笔记(7)——FitLineTool
如果需要了解其他图像处理的文章,请移步小编的GitHub地址
传送门:请点击我
如果点击有误:https://github.com/LeBron-Jian/ComputerVisionPractice
VisionPro有很多的示例和算子,这里再展示一个比较好用的算子FitLine Tool。我自己的笔记不会按照顺序一一展示出来的,也许那个文章先OK,我会先release出来的。 其中大部分的图片和步骤都是VisionPro的官方文档,我这里只是自己的学习笔记,不做任何商用。
在计算机视觉和图像处理领域,直线拟合是一个常见的问题。当我们有一系列的数据点,并希望找到一条最能代表这些数据的直线时,就需要用到直线拟合算法。而VisionPro就有一个非常好用的直线拟合算子FitLineTool。这里我会介绍一下。当然目前已经更新了SmartlineTool,这些后续再说哈。
首先,我会展示一下FitLine这个算子的页面。其次我会根据这个算子的使用步骤学习一下这个算子的原理。这个算子非常好理解,顾名思义就是直线拟合嘛。肯定是根据我们输入的一系列二维坐标点拟合成一条直线,并将直线在终端输出。(注意至少需要两个坐标点才能拟合直线哈)。下面简单过一下。
1,VisionPro 界面文档

- Current.InputImage 缓冲区包含当前图像和提供给工具的输入点集。
- LastRun.InputImage 缓冲区包含工具在将线拟合到输入点集之后的结果。
1,设置

1.1 输入点
默认是最少两个点,如果拟合直线,少于两个点会报错(原因很简单,两点确定一条直线嘛)!!!
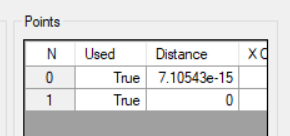
下图展示了只输入一个点,FitLineTool的报错情况:

1.2 要忽略的点
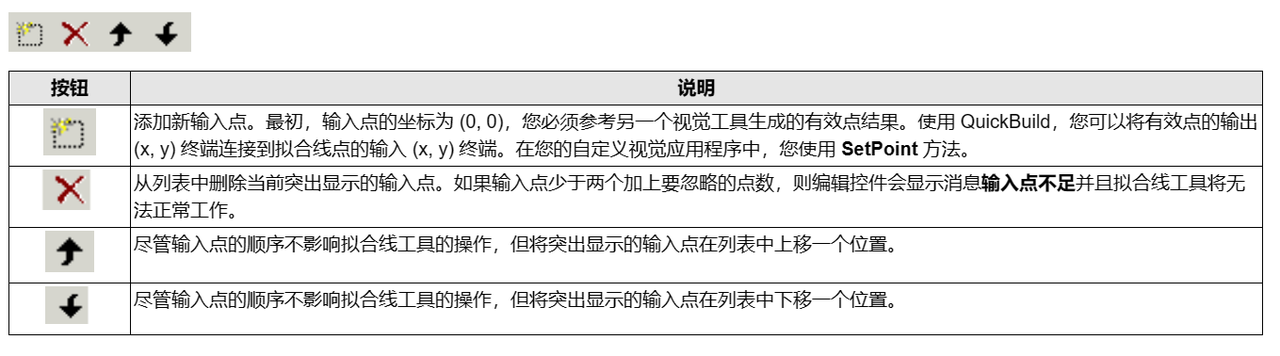
2,图形

该选项卡提供下列选项:

3,结果
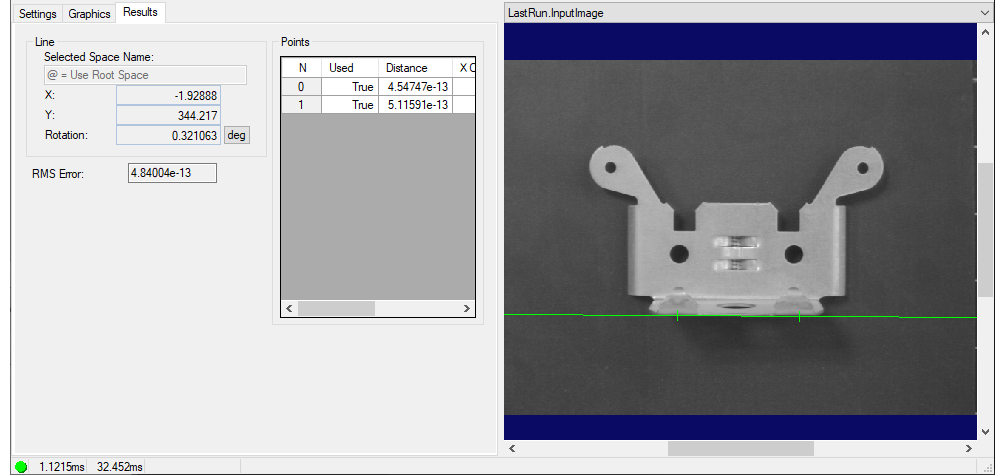
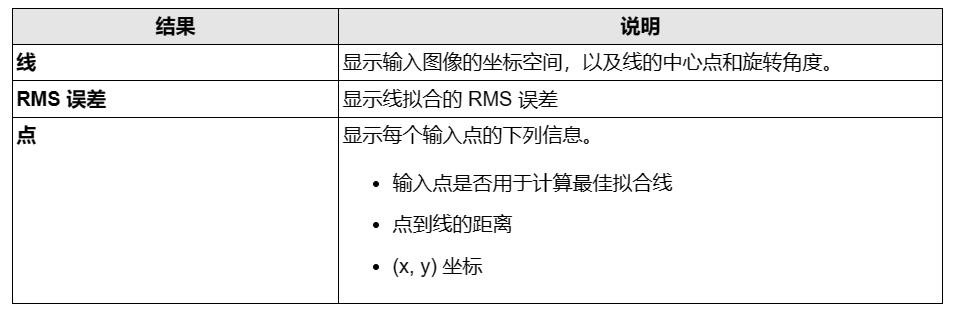
下面三张图是一个结果图,只是输出不能全部一行展开,所以我就截图分开。


2,拟合线的算法原理介绍
2.1 VisionPro FitLineTool 原理
官网上放的东西,我都一一罗列下来,具体使用了什么,我这里就不再详细分析了,毕竟属于人家商业机密。哈哈哈
你可以指定FitLine 工具忽略所提供的部分点。在丢弃允许工具忽略的点数后,工具会尝试使用您提供的点的每个可能组合来拟合线。此工具会丢弃边远点以使用其余点拟合最佳可能的线。

RMS概念
- 对一组数值进行平方。
- 计算平方值的平均值。
- 取平均值的平方根。
2.2 OpenCV fitline 直线拟合函数
下图是OpenCV官方文档中,对直线拟合函数的详细介绍,这个可以好好分析,毕竟是开源的哈。
FitLine算法是一直基于最小二乘法的直线拟合算法。他的基本思想是通过最小化所有点到直线的距离的平方和来估计直线参数。具体来说,我们先假设一条直线的方程为 y=kx+b, 其中k和b是直线的斜率和截距。然后,根据给定的数据点,我们可以构建一个关于k和b的方程组。通过求解这个方程组,我们可以得到直线的参数。FitLine算法的优点是计算速度快,适用于处理大规模数据集。但是,他对噪声和异常值比较敏感,如果数据集中存在较多的噪声或异常值,拟合出的直线可能会偏离真实直线。
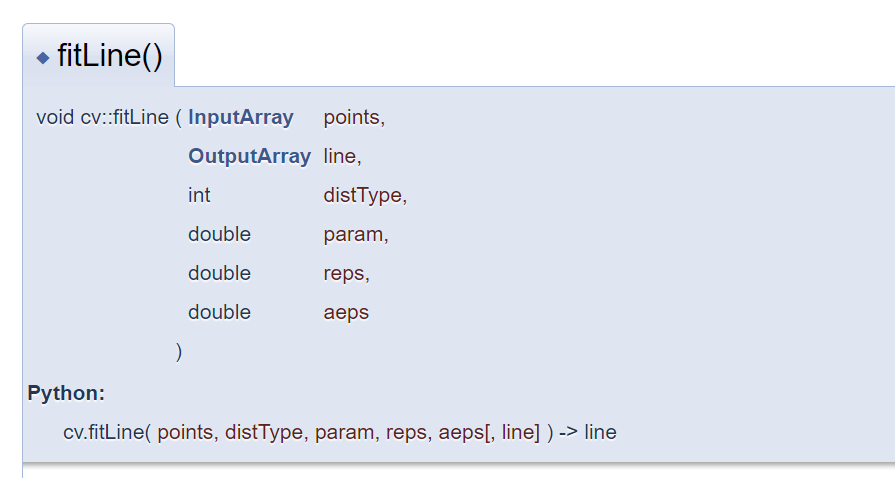
上面很清楚的看到,FitLine函数用于对二维或三维空间中的点集进行直线拟合。共有六个参数(包括输入输出)。
由下可知,CV_DIST_L2为最简单快速的最小二乘法,推荐使用。官方文档中介绍,这里使用的拟合算法是M-estimator方法


具体操作,大家根据自己的实际情况使用。
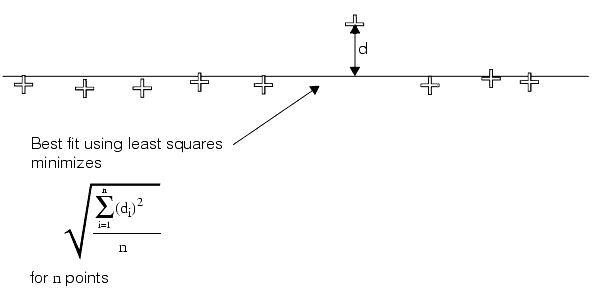
直线拟合的原理很简单,就是给出多个点,然后根据这些点拟合出一条直线,最常见的算法是多约束方程的最小二乘拟合,如下图所示:

但是当这些点当中有一个或者几个离群点(outlier)时候,最小二乘拟合出来的直线就直接翻车了。原因是最小二乘无法在估算拟合的时候剔除或者降低离群点的影响,于是一个聪明的家伙出现了,提出了基于权重的最小二乘拟合估算方法,这样就避免了翻车。根据高斯分布,离群点权重应该尽可能的小,这样就可以降低它的影响,OpenCV中的直线拟合就是就权重最小二乘完成的,在生成权重时候OpenCV支持几种不同的距离计算方法,分别如上面所描述的。其中DIST_L2是最原始的最小二乘,最容易翻车的一种拟合方式,虽然速度快点。所以VisionPro作为商用算子,肯定考虑了这些因素。具体也在其参数列表里面体现了,可以剔除离群因子。
2.3 RANSAC算法
除了上面提到的FitLine算法(基于最小二乘法的直线拟合算法),还有RANSAC算法(随机抽样一致算法),这是一种基于随机抽样的算法。他的基本思想是从数据中随机抽取一定数量的点,然后根据这些点来估计模型参数。接着,用该模型来测试所有的数据点,计算每个点到直线的距离,如果距离小于某个阈值,则认为该点是内点。最后,通过迭代这个过程,找到包含最多内点的模型,即为最佳模型。
RANSAC算法的优点是鲁棒性强,能够处理包含噪声和异常值的数据集。但是,它的计算复杂度较高,需要多次迭代才能找到最佳模型。在实际应用中,我们需要根据具体场景来选择合适的算法。如果数据集包含较多的噪声或异常值,我们可以选择RANSAC算法来提高拟合的鲁棒性;如果数据集规模较大且对计算速度有较高要求,我们可以选择Flitline算法来提高拟合效率。当然,除了这两种算法之外,还有许多其他的直线拟合算法,如霍夫变换、最小中值平方等。在实际应用中,我们可以根据具体需求来选择合适的算法。
RANSAC算法原理
实际上,RANSAC算法的核心在于将点划分为“内点”和“外点”。在一组包含“外点”的数据集中,采用不断迭代的方法,寻找最优参数模型,不符合最优模型的点,被定义为“外点”。这就是RANSAC的核心思想。
其目标:一个模型与含有野值的数据集S的鲁棒拟合。
算法步骤:
- 1,随机地从 S 中选择 s 个数据点组成一个样本作为模型的一个例示
- 2,确定在模型距离阈值 t 内的数据点集 Si, Si称为采样的一致集并定义S的内点
- 3,如果 Si 的大小(内点的数目)大于某个阈值 T ,用 Si 的所有点重估模型并结束
- 4,如果 Si 的大小小于 T, 选择一个新的子集并重复上面的过程
- 5,经过 N 次试验选择最大一致集 Si, 并用 Si 的所有点重估计模型
VisionPro学习笔记(7)——FitLineTool的更多相关文章
- VisionPro学习笔记(1)——软件介绍和基本使用
前言 自己使用visionPro已经有段时间了,最近也一直在研究其算子的理论,为了加深印象,计划将自己的学习笔记整理在博客园,当然其官方文档对如何使用及其各种算子都有详细的介绍,所以这里的笔记仅仅为个 ...
- Visionpro学习笔记(壹)
注册4年,第一次发了随笔.我的博客将主要涉及到visionPro软件的学习,labview数据采集方面的思考,c#及VS的学习 此随笔系列主要是关于VisionPro(以后简称VP)的学习及使用. 近 ...
- Visionpro学习笔记 :QuickBuild-Based Application Run-Once Button
1) Creating a Run-Once Button 通过JobManager调用VisionPro文件.所有的过程放到一个Try/Catch块中. Private Sub RunOnceBut ...
- VisionPro学习笔记:用IEEE1394相机抓取图像
1)找到采集卡: CogFrameGrabber1394DCAMs cameras = new CogFrameGrabber1394DCAMs(); 2)列举相连接的相机: ICogFrameGra ...
- js学习笔记:webpack基础入门(一)
之前听说过webpack,今天想正式的接触一下,先跟着webpack的官方用户指南走: 在这里有: 如何安装webpack 如何使用webpack 如何使用loader 如何使用webpack的开发者 ...
- PHP-自定义模板-学习笔记
1. 开始 这几天,看了李炎恢老师的<PHP第二季度视频>中的“章节7:创建TPL自定义模板”,做一个学习笔记,通过绘制架构图.UML类图和思维导图,来对加深理解. 2. 整体架构图 ...
- PHP-会员登录与注册例子解析-学习笔记
1.开始 最近开始学习李炎恢老师的<PHP第二季度视频>中的“章节5:使用OOP注册会员”,做一个学习笔记,通过绘制基本页面流程和UML类图,来对加深理解. 2.基本页面流程 3.通过UM ...
- 2014年暑假c#学习笔记目录
2014年暑假c#学习笔记 一.C#编程基础 1. c#编程基础之枚举 2. c#编程基础之函数可变参数 3. c#编程基础之字符串基础 4. c#编程基础之字符串函数 5.c#编程基础之ref.ou ...
- JAVA GUI编程学习笔记目录
2014年暑假JAVA GUI编程学习笔记目录 1.JAVA之GUI编程概述 2.JAVA之GUI编程布局 3.JAVA之GUI编程Frame窗口 4.JAVA之GUI编程事件监听机制 5.JAVA之 ...
- seaJs学习笔记2 – seaJs组建库的使用
原文地址:seaJs学习笔记2 – seaJs组建库的使用 我觉得学习新东西并不是会使用它就够了的,会使用仅仅代表你看懂了,理解了,二不代表你深入了,彻悟了它的精髓. 所以不断的学习将是源源不断. 最 ...
随机推荐
- 初接触:从创建工程到导出gerber(学习Altium Designer)
学习Altium Designer Altium Designer的工程文件后缀为.PrjPcb,主要包含Source Documents和Libraries.Source Documents里面有S ...
- 中仑网络全站 Dubbo 2 迁移 Dubbo 3 总结
简介: 中仑网络在 2022 年完成了服务框架从 Dubbo 2 到 Dubbo 3 的全站升级,深度使用了应用级服务发现.Kubernetes 原生服务部署.服务治理等核心能力.来自中仑网络的技术负 ...
- 阿里云实时数仓Hologres年度发布,解读数仓新趋势
简介:阿里云实时数仓Hologres年度发布,解读数仓新趋势. 1月7日,阿里云实时数仓Hologres发布最新版本,在成本.可用性.在线高可用等多方面进行了能力升级,行存吞吐提升100%,列存吞吐 ...
- 2019-8-31-C#-简单读取文件
title author date CreateTime categories C# 简单读取文件 lindexi 2019-08-31 16:55:58 +0800 2018-07-19 16:48 ...
- jumpserver-v3搭建配置与使用
一.jumpserver简介 官网:https://www.jumpserver.org/ 文档:https://docs.jumpserver.org/zh/v3/ 单机部署:https://doc ...
- 临时容器ephermeral(20)
一.临时容器ephermeral概述 参考官方文档: https://kubernetes.io/zh/docs/concepts/workloads/pods/ephemeral-container ...
- ChatGPT开源项目精选合集
大家好,我是 Java陈序员. 2023年,ChatGPT 的爆火无疑是最值得关注的事件之一,AI对话.AI绘图等工具层出不穷. 今天给大家介绍几个 ChatGPT 的开源项目! 关注微信公众号:[J ...
- 简说python之初连ORACLE数据库
目录 Python操作Oracle数据库 1.安装cx_Oracle模块 2.安装oracle客户端 3.python操作oracle示例 4.配置TNS 5.通过tns连接数据库的python 通过 ...
- VMware最小化安装Centos7.6-无桌面
目录 安装包工具 新建虚拟机 安装 centos 7.6 系统 终端登陆系统 设置ip地址 关闭防火墙 关闭 SELINUX SELINUX=enforcing 硬盘挂载 桥接上网方式 安装包工具 V ...
- ruby后台传变量到前端的JS里
后端变量 @namelist 前端解释 var result_json = <%= @namelist.to_json.html_safe %>