MeshLab中进行点云配准
MeshLab是一个开源、可移植和可扩展的三维几何处理系统,主要用于交互处理和非结构化编辑三维三角形网格。它支持多种文件格式:
- import:PLY, STL, OFF, OBJ, 3DS, COLLADA, PTX, V3D, PTS, APTS, XYZ, GTS, TRI, ASC, X3D, X3DV, VRML, ALN
- export:PLY, STL, OFF, OBJ, 3DS, COLLADA, VRML, DXF, GTS, U3D, IDTF, X3D
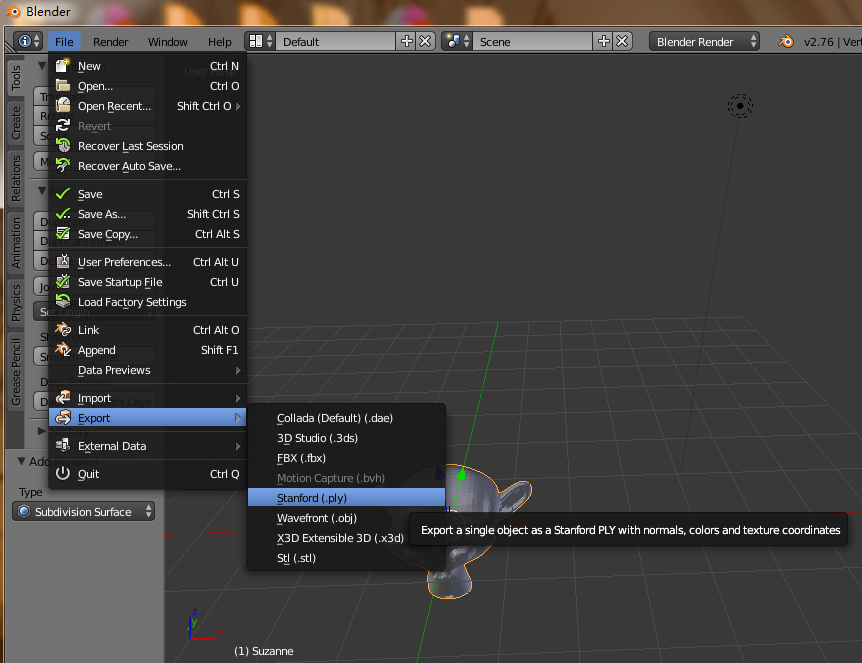
下面来试一下MeshLab中的点云配准功能,为了进行验证,需要先创建两块位置姿态不匹配的点云。这里使用开源的三维建模软件Blender,首先在Blender中按X键删除默认的立方体后,按Shift+A创建一个猴头suzanne(Suzanne is Blender's alternative to more common test models such as the Utah Teapot and the Stanford Bunny),然后添加一个修改器,Subdivision Surface将Render设置为1之后点击Apply。

接下来将其输出为PLY格式的文件( PLY文件格式是Stanford大学开发的一套三维mesh模型数据格式,它允许以ASCII码格式或二进制形式存储文件,在图形学的研究领域中PLY是种常用且重要的文件格式)
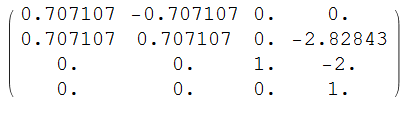
然后将该猴头在Blender中平移和旋转到另一个位置,这里沿着XYZ轴分别平移了2个单位(Blender中使用键盘命令:GX2、GY2、GZ2),然后绕Z轴旋转了-45°(RZ-45),最后也将其输出为PLY文件。

这一变换对应的变换矩阵T为:

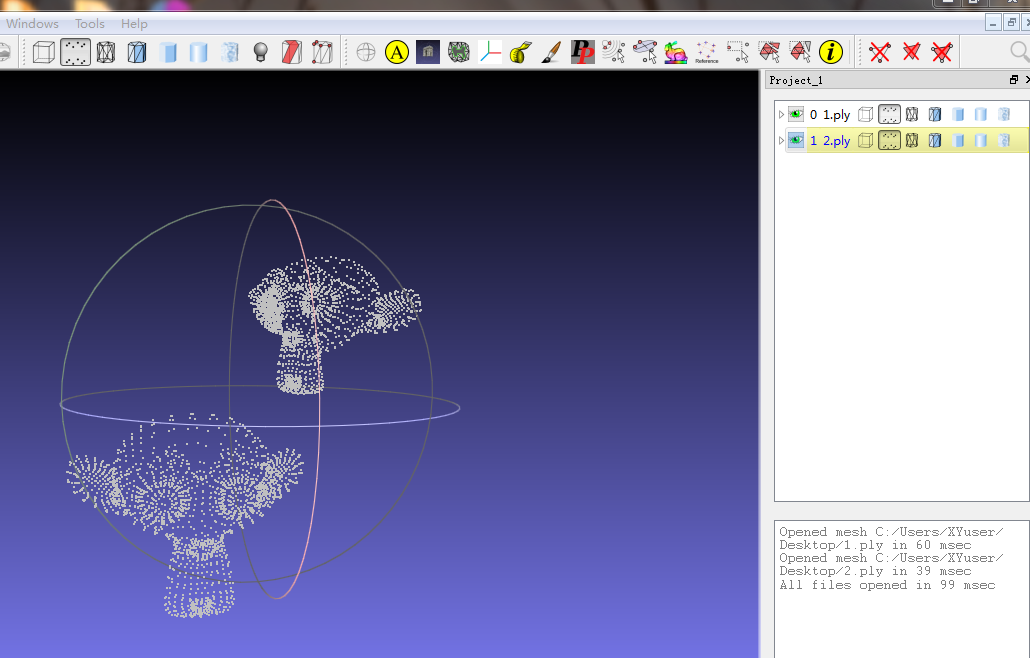
在MeshLab中导入这两个文件,渲染模式选为点后可以看到两块点云,如下图所示。
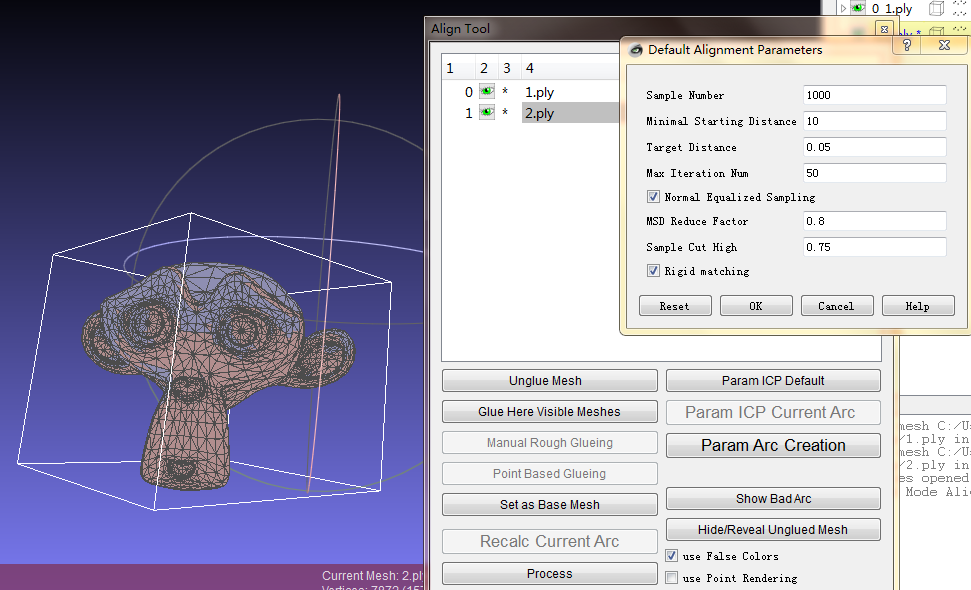
接着点击工具栏上的Align按钮进行配准,这时会弹出一个Align Tool的对话框。首先要选择参考点云,这里将没有平移旋转的原始点云作为参考,然后点击Glue Here Mesh,选择好之后点云名字前面会出现一个星号。
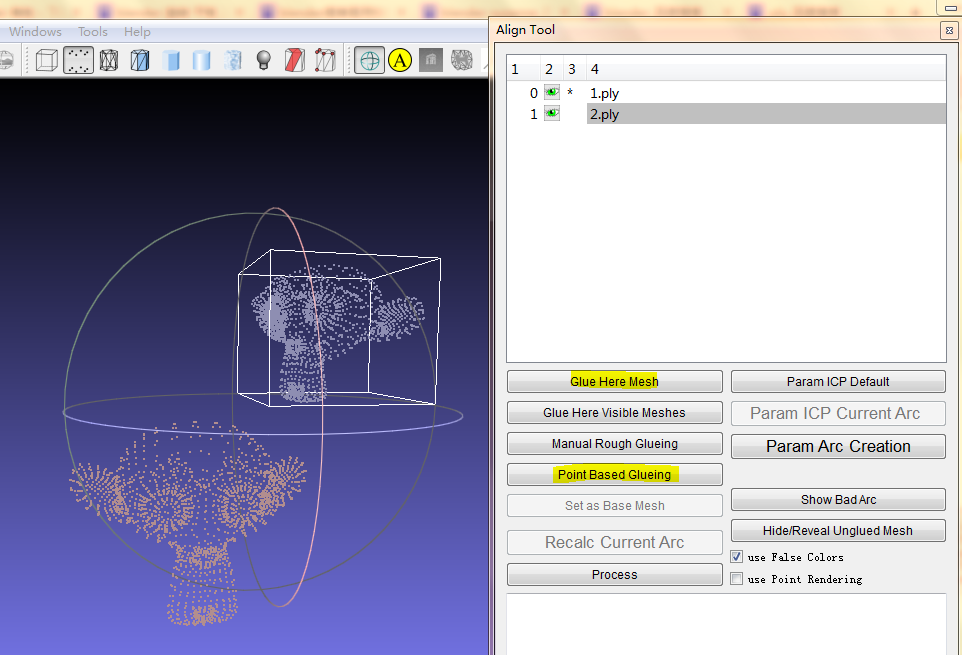
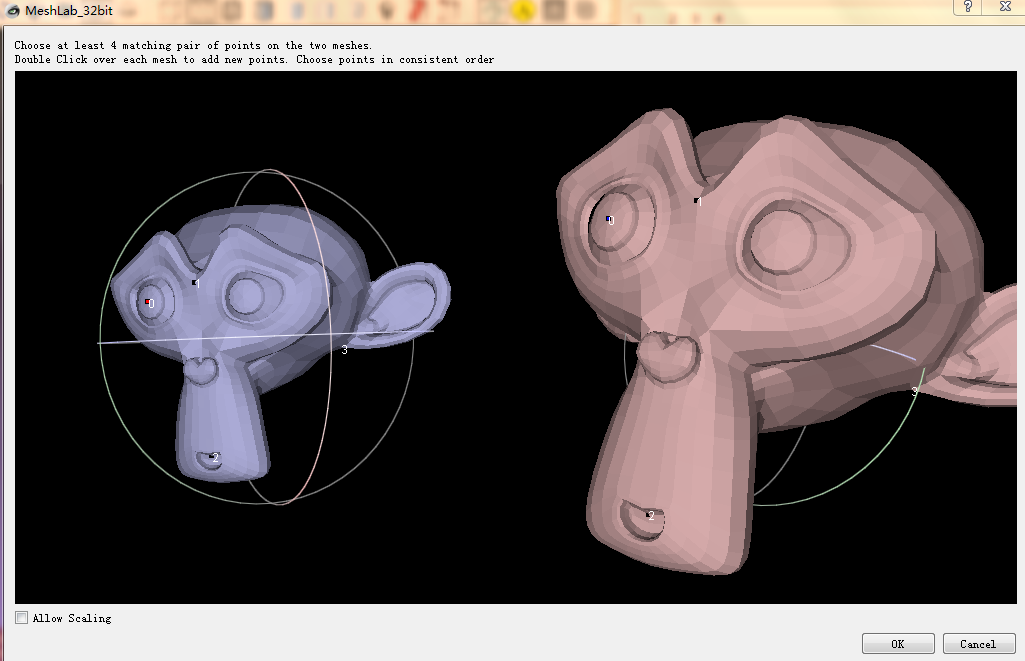
然后选择另一块点云,点击Point Based Glueing,这时弹出一个窗口,在两块点云上手动选择匹配点,至少选4对点之后点OK确认。双击鼠标左键进行选择,按住Ctrl双击左键消除选择。
之后会发现,两块点云基本上重合在了一起,并且第二块点云名字前也出现了一个星号。初始配准之后,我们将进行ICP配准,注意Param ICP Default中的默认参数,根据需要进行修改。如果我们的两块点云大小相同,那么就要勾选Rigid matching选型。如果我们不勾选,那最终的变换矩阵中将会有一个缩放因子。
- 采样点数目(Sample Number):this is the number of samples it pulls from each mesh to compare to the other meshes. You do not want to make this number too big. A small sample typically works quiet well. 1,000 to 5,000 is usually plenty.
- Minimal starting distance:this ignores any samples that are outside of this range. Typically for a manually aligned object you want this to be large enough to encompass your 'point picking' error. A value of 5 or 10 (in millimeters) is usually a good start. Once the initial alignements are complete, drop it down to 1mm to 'fine tune'
- Target distance(相当于均方误差mse):an average alignment error value that the software will try to obtain from the process
- 最大迭代次数(Max iteration number):the maximum number of iterations that the software will perform
点击Process之后软件开始自动计算,将工程保存为ALN文件(Align Project),之后用文本编辑器打开,可以看到Align文件中每一个点云都有一个代表其位置和姿态的旋转矩阵。
1.ply
#
1.000000 -0.000000 -0.000000 -0.000000
0.000000 1.000000 0.000000 -0.000000
0.000000 -0.000000 1.000000 -0.000000
0.000000 0.000000 0.000000 1.000000
2.ply
#
0.706755 -0.707458 0.000400 0.000489
0.707458 0.706755 0.000011 -2.828475
-0.000291 0.000275 1.000000 -1.999996
0.000000 0.000000 0.000000 1.000000
将猴头从位置2变换到位置1的矩阵为T-1:
对比可以看出MeshLab中的Align配准工具正确计算出了变换矩阵T-1。需要注意的是,不要想当然的以为逆矩阵中的移动分量为(-2,-2,-2)T,参考《机器人学导论》中第2章——Spatial descriptions and transformations
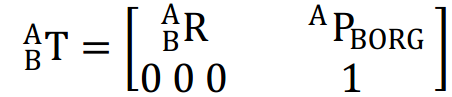
已知B→A的齐次变换矩阵T,则A→B的齐次变换矩阵T-1如下:

参考:
http://blog.csdn.net/szchtx/article/details/7587999
http://download.csdn.net/detail/chx_man/6314891
MeshLab中进行点云配准的更多相关文章
- 使用正态分布变换(Normal Distributions Transform)进行点云配准
正态分布变换算法是一个配准算法,它应用于三维点的统计模型,使用标准优化技术来确定两个点云间的最优的匹配,因为其在配准过程中不利用对应点的特征计算和匹配,所以时间比其他方法快.下面是PCL官网上的一个例 ...
- PCL点云配准(1)
在逆向工程,计算机视觉,文物数字化等领域中,由于点云的不完整,旋转错位,平移错位等,使得要得到的完整的点云就需要对局部点云进行配准,为了得到被测物体的完整数据模型,需要确定一个合适的坐标系,将从各个视 ...
- 使用Meshlab软件将点云(Point Cloud)转换为模型(Mesh)
使用Meshlab软件将点云(Point Cloud)转换为模型(Mesh) 启动Meshlab软件: 导入.ply点云文件: 接着点击: 弹出一个右侧边栏: 接着,计算每个点的法线: 输入100,点 ...
- FPFH+ICP点云配准
A, UniformSampling降噪 B, ISS计算关键点, FPFH特征 在FeatureCloud::setInputCloud中读入点云,并调用processInput进行处理: proc ...
- 3D点云配准算法简述
蝶恋花·槛菊愁烟兰泣露 槛菊愁烟兰泣露,罗幕轻寒,燕子双飞去. 明月不谙离恨苦,斜光到晓穿朱户. 昨夜西风凋碧树,独上高楼,望尽天涯路. 欲寄彩笺兼尺素.山长水阔知何处? --晏殊 导读: 3D点云 ...
- 点云配准的端到端深度神经网络:ICCV2019论文解读
点云配准的端到端深度神经网络:ICCV2019论文解读 DeepVCP: An End-to-End Deep Neural Network for Point Cloud Registration ...
- CVPR2020:训练多视图三维点云配准
CVPR2020:训练多视图三维点云配准 Learning Multiview 3D Point Cloud Registration 源代码和预训练模型:https://github.com/zgo ...
- 在OneThink(ThinkPHP3.2.3)中整合阿里云OSS的PHP-SDK2.0.4,实现Web端直传,服务端签名直传并设置上传回调的实现流程
在OneThink(ThinkPHP3.2.3)中整合阿里云OSS的PHP-SDK2.0.4,实现本地文件上传流程 by shuijingwan · 2016/01/13 1.SDK安装 github ...
- 【阿里云产品公测】在Laravel4框架中使用阿里云ACE的缓存服务
作者:阿里云用户dvbhack 受论坛排版和格式限制,这篇帖子的格式不是很利于阅读,如果你看帖子觉得不那么舒服,可以看我发表在自己博客上的原文:http://www.ofcss.com/2014/04 ...
随机推荐
- 基于UP-CUP6410点灯实验完成
远程点灯实验 实验目的: 实现远程点灯,通过gprs 自带调试软件发送信息,完成智能家具远程点灯实验. 1.定制arm系统 使用uboot资料自带的!在内核中添加pl2303串口驱动,进行u口转串口的 ...
- Inside TSQL Querying - Chapter 1. Logical Query Processing
Logical Query Processing Phases Summary (8) SELECT (9) DISTINCT (11) <TOP_specification> <s ...
- SQL关于apply的两种形式cross apply和outer apply(转载)
SQL 关于apply的两种形式cross apply 和 outer apply apply有两种形式: cross apply 和 outer apply 先看看语法: <lef ...
- CentOS修改主机名和网络信息
1.修改主机名称 [root@centos ~]# vim /etc/sysconfig/network打开文件,修改以下内容并保存 NETWORKING=yes #使用网络 HOSTNAME=cen ...
- SQL Server系统表sysobjects介绍与使用
关于SQL Server数据库的一切信息都保存在它的系统表格里.我怀疑你是否花过比较多的时间来检查系统表格,因为你总是忙于用户表格.但是,你可能需要偶尔做一点不同寻常的事,例如数据库所有的触发器.你可 ...
- fedora 20 yum出错
需要利用linux做项目,所以在win10装了vmvare 以及 fedora,据说这个linux比较稳定.. 1.系统装好以后,需要先把terminal调处理,这才符合程序猿的习惯嘛,具体方法如下 ...
- win8以上版本离线安装.NET
方法一.C盘自带.NET 3.5,安装系统以后直接安装.NET 3.5. 1.按下:win+x,点击“命令提示符(管理员), 2.输入或复制以下代码(不可漏空格):dism.exe / ...
- Mysql备份与还原实例
一.备份数据库 ----清空一下日志 mysql> reset master; Query OK, rows affected (0.02 sec) ----查看一下echo表的存储引擎 mys ...
- 几个常见的Laravel报错及解决方法
报错:「Can't swap PDO instance while within transaction」 transactions >= 1) {throw new RuntimeExcept ...
- shell小细节
1.使用变量的时候无需首先声明其类型 2 cut 剪切数据 3.sed 定址 4.read 读取文件(管道) 5 expr 整值计算 6 lp 打印