SCRDet——对小物体和旋转物体更具鲁棒性的模型
引言
明确提出了三个航拍图像领域内面对的挑战:
- 小物体:航拍图像经常包含很多复杂场景下的小物体。
- 密集:如交通工具和轮船类,在航拍图像中会很密集。这个DOTA数据集的发明者也提到在交通工具和轮船类的检测中,模型的检测效果很差
- 任意方向角:航拍图像中的物体通常有多种多样的朝向。遥感中普遍存在的大宽高比问题进一步对其提出了挑战。
Faster R-CNN是在此领域内大家常用的两阶段目标检测模型,但是它更加适用于水平bbox的目标检测。而作为后处理模块的NMS也抑制了密集分布的任意朝向的物体的检测。
paper中提出的SCRDet模型,包含以下三个主要改进部分:
- 对于小物体检测的问题,提出了SF-Net进行特征融合和anchor采样
- 对于背景噪声多的问题,提出了MDA-Net去抑制噪声和加强前景
- 对于任意方向角的密集检测问题,通过增加一个与角度有关的参数来建立一个角度敏感的网络模块
模型介绍
SCRDet模型的基本结构如下图所示,paper中将其称为一个两阶段的方法,其中第一阶段使用SF-Net和MDA-Net提取出包含更多特征信息和更少噪声的特征图,但这个阶段回归的还是水平框。在第二阶段使用R-NMS方法回归出斜框,最终完成斜框预测的任务。

采样和特征融合网络(SF-Net)
作者认为在小物体检测中的两大障碍为:物体的特征信息不充分以及anchor的采样不够充分。由于小物体在深层网络中更容易丢失自己的特征信息,所以在池化层中会将小物体的特征信息丢失掉很多。且采样步长过大也会导致在采样时跳过很多小物体,导致不充分的采样。
首先是特征融合,由于低层次的特征图能够保留更多小物体的特征,所以基于以上特点有FPN、TDM、RON等特征融合的方法可以使用。
其次是anchor采样,当使用更小采样步长的时候,经过实验证明可以取得更好的EMO score(expected max overlapping score)。如下图所示,使用\(S_A = 8\)的步长能够更好的检测出小物体。
基于以上两个分析,提出SF-Net的模型结构如下图所示。

其中,通过三个尺寸的采样得到三个不同的特征图,SF-Net仅仅使用C3和C4的特征图信息,将两者合并以平衡语义信息和位置信息的比例,其中C4特征图还经过一个Inception模块来扩大它的接受范围和增加它的语义信息。最终得到一个F3特征图,其\(S_A\)是期望的anchor步长
根据步长的变化,模型在DOTA数据集上的表现如下所示。可以看出最终特征图的步长越小,mAP的值越高,训练时长也越长。

多维注意力网络(MDA-Net)
由于真实世界的数据的复杂性,使用原本的方法选出来的候选区域可能包含了很多的噪声信息。如下图所示,这种噪声信息很大程度上模糊了候选区域的边界。
处理噪声问题的传统方法都是采用非监督的算法进行的,这种算法的效率不高。在SCRDet模型中,作者设计了一个多维注意力网络MDA-Net。结构如下图所示:
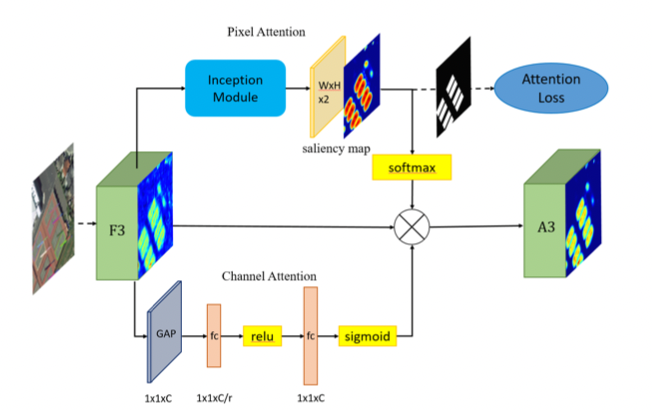
在基于像素的注意网络中,特征图F3通过具有不同大小卷积核进行卷积运算,学习得到双通道的显著图。这个显著图显示了前景和背景的分数。选择显著图中的一个通道与F3相乘,得到新的信息特征图A3。需要注意的是,Softmax函数之后的显着图的值在[0,1]之间。换句话说,它可以降低噪声并相对的增强对象信息。由于显著图是连续的,因此不会完全消除背景信息,这有利于保留某些上下文信息并提高鲁棒性。
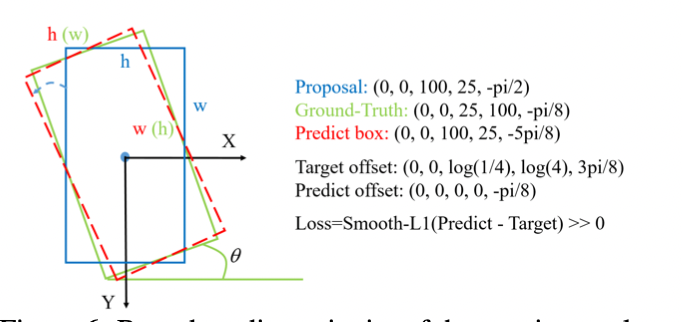
表示方法
论文中采用了另一种五元组表示斜框的方法\((x, y, w, h, \theta)\)。其中\((x,y)\)表示斜框中心点的坐标。\(w\)和\(h\)表示斜框矩形的长宽,\(\theta\)表示斜框的倾斜角度。
则回归的计算方式如下:
\[t_x = (x-x_a)/w_a, t_y = (y-y_a)/h_a \\
t_w = log(w/w_a), t_h = log(h/h_a), t_{\theta} = \theta - \theta_{a}
\]其中最终的预测结果是由R-NMS过程的proposal得到的,将proposal的结果进行顺时针旋转后,再进行长宽调整,得到最终的predict box。我们通过上述式子得到预测框和真实框的两个回归结果,下一步将它们的结果放入损失函数中计算损失。
损失函数
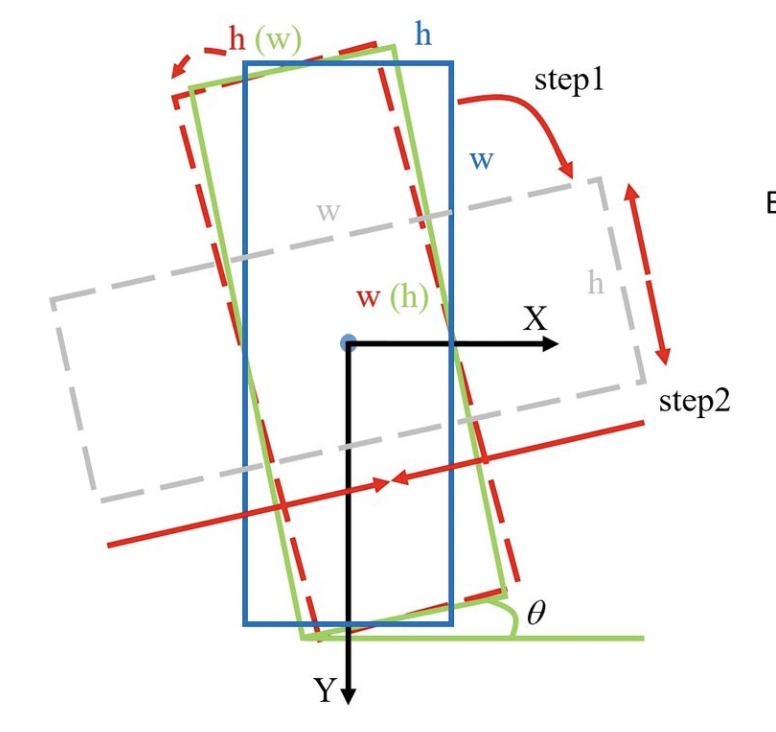
如上图所示,如果我们要将proposal,即蓝色框回归到预测的位置(红色框)上,最简单的方法就是将其逆时针旋转。但是这种方法的回归损失非常大(由于我们设定的是顺时针旋转,此时按照单一旋转的方法回归到红色框就会使角度变化很大)。此时我们可以采用另一种思路,即将蓝色框回归到下图灰色框的位置,然后调整灰色框的长和宽。
这种损失会使得计算更加麻烦,为了更好地解决这个问题,作者在传统的smooth L1 损失函数中引入了IoU常数因子。整体的损失函数表达如下所示:
\[Loss = \frac{\lambda_1}{N}\sum_{n=1}^{N}t^{'}_n\sum_{j\in (x,y,w,h,\theta) }\frac{L_{reg}(v^{'}_{nj}, v_{nj})}{|L_{reg}(v^{'}_{nj}, v_{nj})|} * |- log(IoU)| \\
+\frac{\lambda_2}{h \times w}\sum_i^h\sum_j^wL_{att}(u^{'}_{ij}, u_{ij}) + \frac{\lambda_3}{N}\sum_{n=1}^NL_{cls}(p_n,t_n)
\]其中,\(\lambda\)参数使用来调整各部分损失比例大小的。\(N\)代表了proposal的数量,\(t^{'}_n\)是一个二进制值(当其为1是表示前景,为0是表示背景)。v向量表示了斜框用\((x,y,w,h,\theta)\)五元组表示方法表示出来的向量,u向量表示了预测结果和真实结果之间的像素相关性。IoU表示了预测框和真实框之间的重合。
三个回归函数分别为:\(L_{reg}\)为位置损失,使用smooth L1损失、\(L_{att}\)为注意力损失,使用交叉熵损失、\(L_{cls}\)为分类损失,使用softmax损失。
关于IoU的进一步解释:由于IoU表示了预测框和真实框之间的相近程度,那么它自然满足一个属性:当预测框和真实框之间越相近时,它的值越接近于1。这样就可以用一个恒为正的值\(\log(IoU)\)来控制当前的梯度大小问题。我们可以将\(\frac{L_{reg}}{|L_{reg}|}\)看做一部分,它代表了当前梯度下降最快的方向向量,而把\(-log(IoU)\)看做控制梯度大小的一个变量,这样使得损失函数更加连续。
下面是使用两种loss函数的结果对比。可以看出使用IoU-smooth L1 loss的模型预测的结果更加好。

导致(a)这种结果的根本原因是角度的预测超出了所定义范围。其实解决这种问题的方法并不唯一,RRPN和R_DFPN在论文的loss公式中就判断了是不是在定义范围内,通过加减\(k\pi\)来缓解这个问题,但这种做法明显不优美而且仍然存在问题,主要是较难判断超出预测范围几个角度周期。当然可以通过对角度部分的loss加一个周期性函数,比如\(tan\)、\(cos\)等三角函数来做,但实际使用过程中常常出现不收敛的情况。
总结
- MDA-Net:作用体现在对去噪的效果以及特征的提取上
- SF-Net:作用体现在对小物体的检测上
- IoU-smooth L1 loss:作用体现在回归时消除边界影响
- image pyramid:作者在论文中并没有详细说明这一方法,其实就是将图像似金字塔般resize成多种形状传入模型中进行学习,这样也是一个提高性能的好方式。
SCRDet——对小物体和旋转物体更具鲁棒性的模型的更多相关文章
- 【three.js第三课】鼠标事件,移动、旋转物体
1.下载three.js的源码包后,文件夹结构如下: 2.在[three.js第一课]的代码基础上,引入OrbitControls.js文件,此文件主要用于 对鼠标的操作. 该文件位置:在文件结构中 ...
- Threejs【坐标转换】如何让annotation跟随物体一起旋转
现在根据鼠标点击的屏幕位置能够得到屏幕的坐标event.clientX和event.clientY,然后我的annotation就初始化在这个屏幕坐标的位置,那么如何绑定annotation和三维物体 ...
- (转)使用Python和OpenCV检测图像中的物体并将物体裁剪下来
原文链接:https://blog.csdn.net/liqiancao/article/details/55670749 介绍 硕士阶段的毕设是关于昆虫图像分类的,代码写到一半,上周五导师又给我新的 ...
- Unity查找物体的子物体、孙物体
Unity查找物体下的所有物体 本文提供全流程,中文翻译. Chinar 坚持将简单的生活方式,带给世人!(拥有更好的阅读体验 -- 高分辨率用户请根据需求调整网页缩放比例) Chinar -- 心分 ...
- 微信小程序(7)--微信小程序连续旋转动画
微信小程序连续旋转动画 https://mp.weixin.qq.com/debug/wxadoc/dev/api/api-animation.html <view animation=&quo ...
- javascript学习-原生javascript的小特效(多物体运动效果)
前些日子看了个视频所以就模仿它的技术来为大家做出几个简单的JS小特效 今天为大家做的是多个物体的运动效果, 1:HTML <body> <ul> <li> ...
- AR Engine光照估计能力,让虚拟物体在现实世界更具真实感
AR是一项现实增强技术,即在视觉层面上实现虚拟物体和现实世界的深度融合,打造沉浸式AR交互体验.而想要增强虚拟物体与现实世界的融合效果,光照估计则是关键能力之一. 人们所看到的世界外观,都是由光和物质 ...
- UGUI_创建旋转物体,使用Slider控制小球旋转速度
using System.Collections; using System.Collections.Generic; using UnityEngine; public class Player : ...
- 【three.js练习程序】旋转物体自身
<!DOCTYPE html> <html> <head> <meta charset="utf-8"> <title> ...
随机推荐
- QMake(Qt项目构建)
qmake工具能够简化不同平台上的项目构建.可以自动产生Makefiles文件,仅仅需要少量的信息就可以生成Makefile文件.同时qmake也可以构建不是Qt的项目.qmake基于项目文件中的信息 ...
- 公众号H5页面接入微信登录流程
公众号H5页面接入微信登录流程 源码地址 https://gitee.com/szxio/h5_weixin 起步 首先创建一个项目,我们采用uni-app来作为我们的前端框架 环境安装 全局安装vu ...
- tar 解压分割压缩文件
被分割后的压缩文件必须先合并成一个压缩文件才能正常的解压. 第一步.合并压缩文件 第二步.正常解压 $ls TINA-1.3.tar.gzaa TINA-1.3.tar.gzab TINA-1.3.t ...
- 20191310Lee_yellow缓冲区溢出实验
缓冲区溢出实验 1.什么是缓冲区溢出 缓冲区溢出是指程序试图向缓冲区写入超出预分配固定长度数据的情况.这一漏洞可以被恶意用户利用来改变程序的流控制,甚至执行代码的任意片段.这一漏洞的出现是由于数据 ...
- DeWeb和WebXone的区别
DeWeb和WebXone的区别 相同点: 1 两者为同一开发者研发.QQ:45300355,碧树西风 2 都是为了解决Delphi开发Web的问题 区别: 1 WebXone采用的ActiveX/N ...
- python解释器的下载与安装
python解释器 1. 什么是python解释器 用一种能让电脑听的懂得语言,使得电脑可以听从人们的指令去进行工作(翻译官) Python解释器本身也是个程序, 它是解释执行Python代码的,所以 ...
- 力扣 - 剑指 Offer 67. 把字符串转换成整数
题目 剑指 Offer 67. 把字符串转换成整数 思路1 根据题意,要解决这题,首先要判断的条件有: 不包括首位空格 第一位必须为:+.-.数字三者其一,否则不合法 数字必须连续的,如果遇到非数字, ...
- Linux&c 文件操作,线程进程控制,网络编程,简单知识点梳理
一:文件操作 在linux下,一切皆文件,目录是文件,称为目录文件,内容是该目录的目录项(但是目录只有内核可以编辑,超级用户也不可以编辑),设备也是设备文件,在/dev存放的就是一些设备文件,linu ...
- 使用python操作HDF5文件
HDF Hierarchical Data Format,又称HDF5 在深度学习中,通常会使用巨量的数据或图片来训练网络.对于如此大的数据集,如果对于每张图片都单独从硬盘读取.预处理.之后再送入网络 ...
- PTA 7-1 还原二叉树 (25分)
PTA 7-1 还原二叉树 (25分) 给定一棵二叉树的先序遍历序列和中序遍历序列,要求计算该二叉树的高度. 输入格式: 输入首先给出正整数N(≤50),为树中结点总数.下面两行先后给出先序和中序遍历 ...