Ubuntu 16.04 ROS环境配置
最近新入职一家公司,是搞智能无人驾驶的,用的操作系统是Ubuntu和ros,之前没接触过ros系统,既然公司用那就必须的学习啊,话不多说先装它一个ros玩玩...
1. Ubuntu 安装 ROS Kinetic
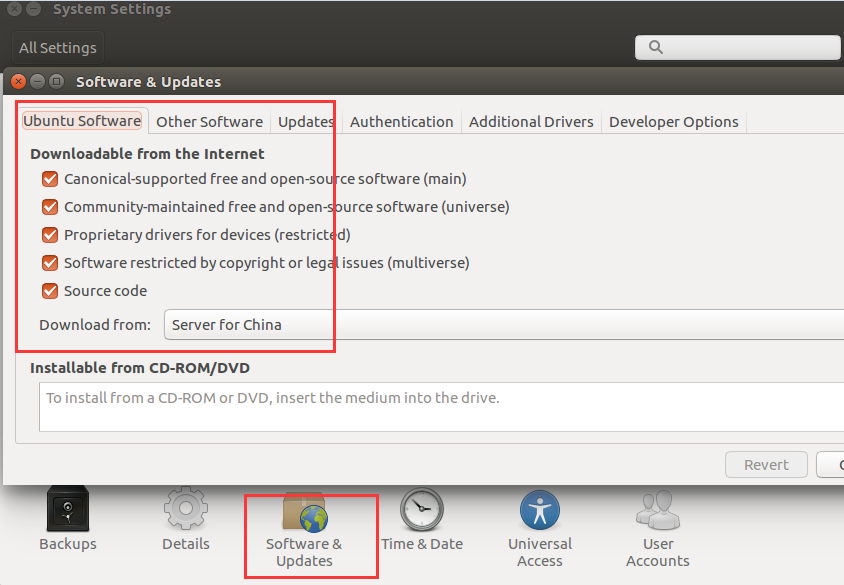
1.1Configure your Ubuntu repositories(配置您的Ubuntu存储库)
在系统设置中,找到软件与更新,将如下几个都勾选,允许其从互联网下载。
1.2 Setup your sources.list(设置你的计算机以接受packages.ros.org中的软件).
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
1.3 Set up your keys
$ sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
Executing: /tmp/tmp.NItfnqYQnV/gpg.1.sh --keyserver
hkp://ha.pool.sks-keyservers.net:80
--recv-key
421C365BD9FF1F717815A3895523BAEEB01FA116
gpg: requesting key B01FA116 from hkp server ha.pool.sks-keyservers.net
gpg: key B01FA116: public key "ROS Builder <rosbuild@ros.org>" imported
gpg: Total number processed: 1
gpg: imported: 1
1.4 Installation
$ sudo apt-get update
$ sudo apt-get install ros-kinetic-desktop-full
安装过程中如果出现如下的错误,删除就可以.
# 错误
E: Could not get lock /var/lib/dpkg/lock - open (11 Resource temporarily unavailable)
E: Unable to lock the administration directory (/var/lib/dpkg/), is another process using it?
#执行如下命令解决
sudo rm /var/cache/apt/archives/lock
sudo rm /var/lib/dpkg/lock
1.5 Initialize rosdep(初始化rosdep)
$ sudo rosdep init
$ rosdep update
1.6 Environment setup(配置环境)
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
1.7 Dependencies for building packages(安装building package的依赖)
$ sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
1.8测试ROS安装是否成功
1> 打开Termial,输入以下命令,初始化ROS环境:
$ roscore
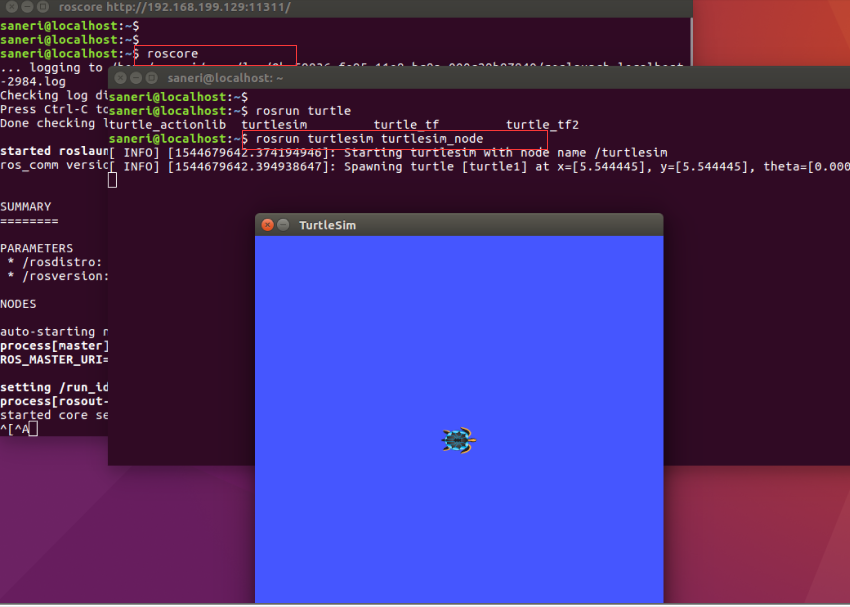
2> 打开新的Termial,输入以下命令,弹出一个小乌龟窗口如下图:
$ rosrun turtlesim turtlesim_node
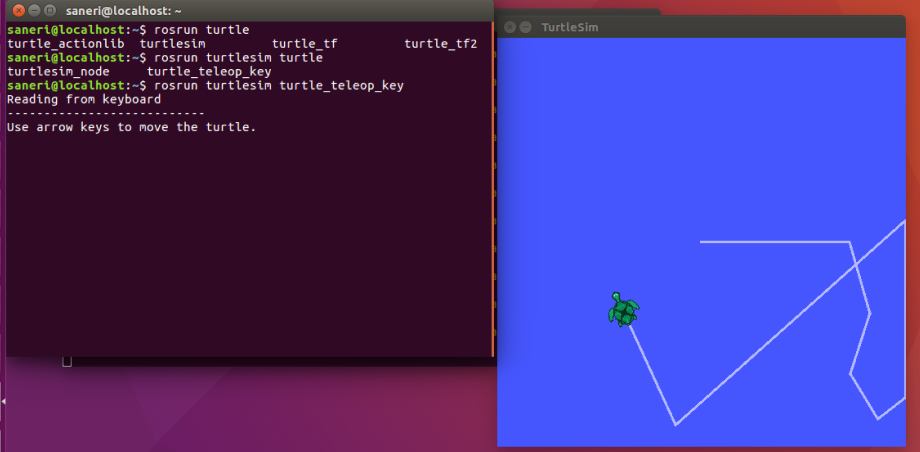
3> 打开新的Termial,输入以下命令,可以在Termial中通过方向键控制小乌龟的移动,如果不能控制,请选中turtle_teleop_key所在的终端窗口以确保你的按键输入能够被捕获。
$ rosrun turtlesim turtle_teleop_key
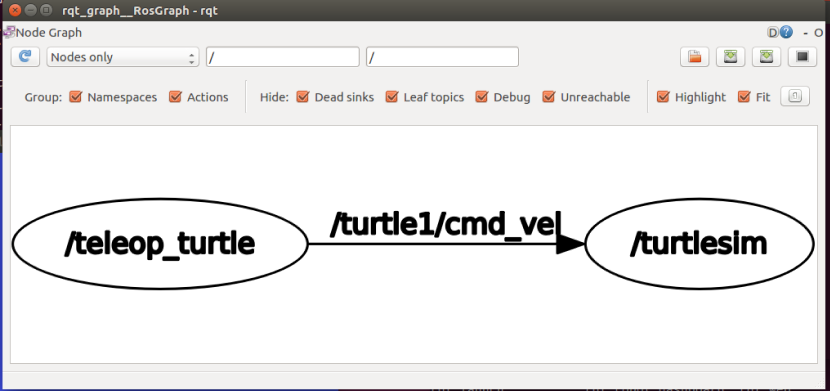
4.>打开新的Termial,输入以下命令,弹出新的窗口查看ROS节点信息:
$ rosrun rqt_graph rqt_graph
至此,ros Kinetic安装完成,下面就需要学习ros系统的使用了.
ROS环境变量管理
如果你在查找和使用ROS软件包方面遇到了问题,请确保你已经正确配置了脚本环境。一个检查的好方法是确保你已经设置了像ROS_ROOT和ROS_PACKAGE_PATH这样的环境变量,可以通过以下命令查看:
$ export |grep ros
如果你是通过ubuntu上的 apt 工具来安装ROS的,那么你将会在'/opt/ros/<distro>/'目录中看到setup.*sh文件,然后你可以执行下面的source命令:
# source /opt/ros/<distro>/setup.bash
请使用具体的ROS发行版名称代替<distro>,我的版本是kinetic版本的,则执行命令为:
$ source /opt/ros/kinetic/setup.bash
查看ROS版本的方法:
1、先在终端输入roscore
2、打开新终端,再输入,rosparam list
3、再输入rosparam get /rosdistro 就能得到版本
$ rosparam get /rosdistro
'kinetic '
参考文档: http://wiki.ros.org/kinetic/Installation/Ubuntu
https://blog.csdn.net/softimite_zifeng/article/details/78632211
Ubuntu 16.04 ROS环境配置的更多相关文章
- Intel realSense ubuntu 16.04+python 环境配置指南
1. 安装librealsense2-dkms 以及librealsense2-utils 1.Register the server's public key: sudo apt-key adv - ...
- Ubuntu 16.04 Go环境搭建 Go环境+Sublime配置
Ubuntu 16.04 Go环境搭建 Go环境+Sublime配置 1. 安装Go 下载地址https://golang.org/dl/ (需要翻下) 下载到类似go1.8.3.linux-amd6 ...
- Ubuntu 16.04 + ROS Kinetic 机器人操作系统学习镜像分享与使用安装说明
Ubuntu 16.04 + ROS Kinetic 镜像分享与使用安装说明 内容概要:1 网盘文件介绍 2 镜像制作 3 系统使用与安装 ---- 祝ROS爱好者和开发者新年快乐:-) ---- ...
- 如何在Ubuntu 16.04上安装配置Redis
如何在Ubuntu 16.04上安装配置Redis Redis是一个内存中的键值存储,以其灵活性,性能和广泛的语言支持而闻名.在本指南中,我们将演示如何在Ubuntu 16.04服务器上安装和配置Re ...
- Ubuntu 16.04 samba相关配置
samba是 SMB/CIFS网络协议的重新实现,它作为NFS的补充使得在Linux和Windows系统之间进行文件共享.打印更容易实现. 相关介绍: SAMBA套件: (1)samba:这个套件主要 ...
- Ubuntu 16.04 root环境变量不生效问题解决方案
在Ubuntu 16.04中配置JDK环境变量,但是在切换到root时不生效 . 在/etc/profile中添加如下: export JAVA_HOME=/opt/java/jdk1..0_151 ...
- Ubuntu 16.04 服务器上配置使用 Docker
Docker基础概念 在使用Docker之前,我们先了解下几个Docker的核心概念 Docker Daemon Docker引擎,就是运行在后台的一个守护进程,在我们启动它之后,我们就可以通过Doc ...
- Ubuntu 16.04 安装和配置 Redis
因为发现之前手动安装的 redis 与现有的教程不一样,所以总结统一一下安装的标准步骤. 安装依赖项 为了获取最新版本的 Redis,我们将从源代码进行编译和安装.下载源代码之前,需要先安装一些编译所 ...
- Ubuntu 16.04上thunderbird配置163邮箱出现“配置无法被验证-请查看用户名或密码是否正确?”
在Ubuntu 16.04 上用thunderbird配置163免费邮箱时出现的提示信息如图1: 图1 提示信息 网上有不少方法都说是将接收和发出的主机名分别改为 imap.ym.163.com 和 ...
随机推荐
- Ubuntu1404安装eclipse(目的是为了运行python,当然java更可以)
原创文章,不得转载 我是彩印网(www.caiyin.com) 的技术开发人员,在这里首先请允许我做下业务的介绍 彩印网是由北京出彩电子商务有限公司运营的专业印刷电商,集线上购物.支付.设计.制作.配 ...
- spring boot ${}占位符不起作用
问题:在 pom.xml 文件里定义好属性标签,然后在 properties或者xml 中使用${key}引用,打包之后就会自动替换掉. 但是在使用 spring boot 后发现,@可以替换,但是$ ...
- JS_高程3.基本概念(1)
1.语法 (1)ECMAScript中的一切(变量,函数名和操作符)都是区分大小写的. (2)标识符 标识符的第一个字符必须是字母,下划线或是美元符号. 其他字符可以是字母,下划线,美元符号和数字. ...
- JS——事件流与事件处理程序
1.事件流:从页面中接收事件的顺序 1.1 IE :事件冒泡流1.2 Netscape :事件捕获1.3 DOM事件流 :事件捕获阶段——事件目标阶段——事件冒泡阶段DOM2级事件规定 :捕获阶段不会 ...
- txt2xls
#!/bin/env python# -*- encoding: utf-8 -*-import datetimeimport timeimport osimport sysimport openpy ...
- 为什么样本方差分母是n-1
https://blog.csdn.net/qq_39521554/article/details/79633207 为什么样本方差的分母是n-1?为什么它又叫做无偏估计? 至于为什么是n-1,可以看 ...
- SpringBoot(十三):springboot2.0.2定时任务
使用定义任务: 第一步:启用定时任务第二步:配置定时器资源等第三步:定义定时任务并指定触发规则 1)启动类启用定时任务 在springboot入口类上添加注解@EnableScheduling即可. ...
- 自动化运维之PSSH
1.PSSH简介 PSSH提供OpenSSH和相关工具的并行版本.包括pssh,pscp,prsync,pnuke和pslurp.该项目包括psshlib,可以在自定义应用程序中使用. pssh是py ...
- CentOS7通过rsync+crontab实现两台服务器文件同步
centos7系统中已经默认安装rsync 1:主服务器配置 (1)修改rsyncd.conf 配置文件 [root@localhost app]# vi /etc/rsyncd.conf motd ...
- 设置mysql 事务锁超时时间 innodb_lock_wait_timeout
Mysql数据库采用InnoDB模式,默认参数:innodb_lock_wait_timeout设置锁等待的时间是50s,一旦数据库锁超过这个时间就会报错. mysql> SHOW GLOBAL ...