nao机器人使用手册
简单使用和保养
开关机和马达
开机是按一下,后来按一下相当于重启了一次程序,3是播报IP地址,5秒是关机,8秒是强制关机。
电池
3月左右不用需要取下电池。夏天5-8小时,冬天8-10小时充电。活动时间1-1.5小时。
下载
https://developer.softbankrobotics.com/nao6/downloads/nao6-downloads-windows
缺乏VCOMP120.DLL
实际上是缺乏32位VCOMP120.DLL文件。因为vc++2008 32位安装之后只有VCOMP100.DLL和VCOMP140.DLL,可能VCOMP120.DLL被淘汰了。Choregraphe是32位的程序。
我的轻薄办公本不可以运行,游戏笔记本反而可以运行。说明还是环境的问题。游戏笔记本环境配置齐全
Choregraphe-bin.exe – Missing Files error fix
开发文档
http://doc.aldebaran.com/2-8/index_dev_guide.html
两种编程方式
Choregraphe盒子编程
可视化编程教程
https://www.bilibili.com/video/BV18s411B7cN?p=7&spm_id_from=pageDriver
其实很不方便,时间轴动作难以使用。除非用来编舞等过于复杂的持续动作规划。复杂的连接线也许让人眼花缭乱。计算机程序员不建议使用,仅仅用于测试。
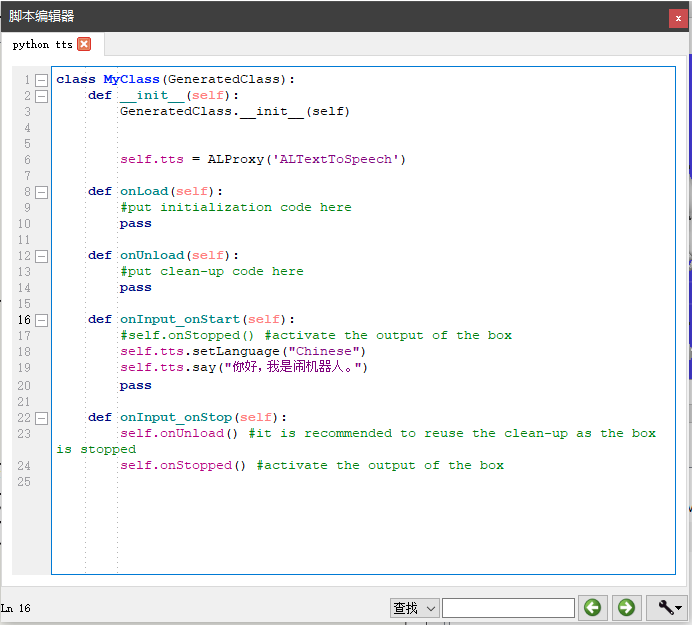
Choregraphe盒子中内嵌python代码
有没有感觉和arduino和unity3d相似啊,这些触发式的程序大同小异。所以有句话叫if语句能完成所有的编程语句。
http://doc.aldebaran.com/2-8/getting_started/helloworld_choregraphe_script.html
http://doc.aldebaran.com/2-1/software/choregraphe/objects/python_script.html
python代码
官方教程
语音合成
http://doc.aldebaran.com/2-1/naoqi/audio/altexttospeech-tuto.html
动作运动
http://doc.aldebaran.com/2-1/dev/python/examples/motion/index.html
似乎NAO自带了动作防止摔系统限制了输入动作序列的执行。
模拟器
Choregraphe 自带模拟器
可以局域网下跨电脑连接虚拟机器人。但是不支持OpenRoberta下载并写入虚拟机器人文件
webot
http://doc.aldebaran.com/2-1/software/webots/webots_index.html#getting-started
v-rep
一个别人设置好的模拟器,似乎Choregraphe 会争用端口。
https://github.com/PierreJac/Project-NAO-Control
舞蹈下载
https://funlab.nd.edu/the-nao-base/special-movements/
相关研究
OpenRoberta
图形化编程输出python写入NAO机器人
https://github.com/OpenRoberta?page=1
使用Open Roberta Connector建立OpenRoberta编辑器网页和本地机器人的连接,不要手动输入IP地址和端口,点击scan自动检测。因为外网出口IP和本地局域网不一样,尚不知道真正IP和端口。
后记
很多人说NAO机器人没什么用,我也这么认为。但是我很讨厌现在互联网中外行人的狂热和嫌弃。刚开始这些外行商人疯狂吹捧,过两年又唾弃嫌弃。
每种技术有其技术价值。计算机科学和技术犹如变魔术。不在于工具,而在于idea和组合,相互掩护技术缺点,发挥技术优点。
对于先入手ROS的玩家来说,虽然NAO很垃圾。但是勉勉强强也又些价值。
优点
NAOqi作为和ROS有些相似的通信架构,具有参考价值,也许以后能对我开发C#版本的类似架构产生灵感。C# core和C++等底层相关交互性更好。
NAO提供了语音相关的API,不用单独维护语音相关API,简化了框架搭建的细节。反正学校一般会购买全套的NAO应用。但是遗憾也在这里,因为昂贵无法改装,安装深度相机。
NAO可以通过中间件和ROS通信,可以进行ROS相关开发。
缺点
NAO虽然提供了灵活关节,但是没有深度相机和激光雷达。另外因为学校购买的原因,无法进行改装,在头顶安装深度相机。
NAO提供的两个摄像头无法和通用的基于深度相机的视觉slam开发相兼容。也就是说即使你花心思玩出了一些花样,也无法和主流社区兼容和迁移。
所以也就只能跳跳舞了。。。令人绝望的现实。。。
NAO价格昂贵却又不值得,很多学校维护不起队伍。借入借出大家都很小心。推荐大家还是玩模拟器吧
项目地址
nao机器人使用手册的更多相关文章
- NAO机器人
NAO机器人是Aldebaran Robotics公司研制的一款人工智能机器人.它拥有着讨人喜欢的外形,并具备有一定程度的人工智能和约一定程度的情感智商并能够和人亲切的互动. 教学研究类/NAO机器人 ...
- NAO机器人开发环境配置
python python2.7用于NAO开发 https://www.python.org/downloads/release/python-2718/ python3.6用于其他程序测试. htt ...
- python控制另一台电脑虚拟nao机器人
nao机器人ip地址 http://doc.aldebaran.com/1-14/software/choregraphe/howto_connect_to_simulated.html 结果 访问另 ...
- Choregraphe 2.8.6.23虚拟Nao机器人Socket is not connected
Traceback (most recent call last): File "c:/Users/fengmao/OneDrive - University of Wollongong/J ...
- Nao 类人机器人 相关资料
Nao 类人机器人 相关资料: 1.兄妹 PEPPER :在山东烟台生产,http://www.robot-china.com/news/201510/30/26564.html 2.国内机器人领先公 ...
- 生活娱乐 Wifi机器人的制作流程
思路简单,但是创意无限~~ 动手能力超强 牛人教你做Wifi机器人(图) 一.前言 Wifi机器人(Wifi Robot):其实是一辆能通过互联网,或500米以外的笔记本无线设施来远程控制的遥控汽车. ...
- 【资讯】天啦鲁,这十余款创客设计居然由FPGA搞定 [转]
按理说‘高大上’的FPGA,多出现在航天航空(如火星探测器).通信(如基站.数据中心).测试测量等高端应用场景.但麦迪却也发现,近期,在很多创客的作品内部都有FPGA的影子.这或许也从侧面看出,打从总 ...
- Perception(0-1.1)
The perception modules run in the context of the process Cognition. They detect features in the imag ...
- 使用Kinect2.0控制VREP中的虚拟模型
VREP中直接设置物体姿态的函数有3个: simSetObjectOrientation:通过欧拉角设置姿态 simSetObjectQuaternion:通过四元数设置姿态 simSetObject ...
随机推荐
- 再识requests
高级用法 本篇文档涵盖了 Requests 的一些高级特性. 会话对象 会话对象让你能够跨请求保持某些参数.它也会在同一个 Session 实例发出的所有请求之间保持 cookie, 期间使用 url ...
- wordpress页面F12时源码多出的内容在index.php header.php找不到
wordpress页面按F12时源码多出的内容在index.php header.php找不到 比如类似这样的内容: <div style="position:absolute;fil ...
- JAVA根据URL生成二维码图片、根据路径生成二维码图片
引入jar包 zxing-2.3.0.jar.IKAnalyzer2012_u6.jar 下载地址:https://yvioo.lanzous.com/b00nlbp6h ...
- 【LeetCode】1064. Fixed Point 解题报告(C++)
作者: 负雪明烛 id: fuxuemingzhu 个人博客:http://fuxuemingzhu.cn/ 目录 题目描述 题目大意 解题方法 暴力求解 日期 题目地址:https://leetco ...
- 【LeetCode】979. Distribute Coins in Binary Tree 解题报告(C++)
作者: 负雪明烛 id: fuxuemingzhu 个人博客: http://fuxuemingzhu.cn/ 目录 题目描述 题目大意 解题方法 递归 日期 题目地址:https://leetcod ...
- 【LeetCode】692. Top K Frequent Words 解题报告(Python)
[LeetCode]692. Top K Frequent Words 解题报告(Python) 标签: LeetCode 题目地址:https://leetcode.com/problems/top ...
- 【LeetCode】165. Compare Version Numbers 解题报告(Python)
[LeetCode]165. Compare Version Numbers 解题报告(Python) 标签(空格分隔): LeetCode 作者: 负雪明烛 id: fuxuemingzhu 个人博 ...
- 防止 jar 包被反编译
1.隔离Java程序 最简单的方法就是让用户不能够访问到Java Class程序,这种方法是最根本的方法,具体实现有多种方式.例如,开发人员可以将关键的Java Class放在服务器端,客户端通过访问 ...
- 离线版centos8环境部署迁移监控操作笔记
嗨咯,前两天总结记录了离线版centos8下docker的部署笔记,今天正好是2021年的最后一天,今天正好坐在本次出差回家的列车上,车上没有上面事做,索性不如把本次离线版centos8环境安装的其他 ...
- CentOS7.6下安装Redis5.0.7
此次安装是在CentOS7下安装Redis5.0.7 一.首先准备Redis安装包 这里下载的是 redis-5.0.7.tar.gz 安装包,并将其直接放在了 root ⽬录下 压缩包下载地址:ht ...