松灵机器人scout mini小车 自主导航(3)——建图导航仿真
松灵机器人Scout mini小车建图导航仿真
在之前的文章中,我们已经介绍了如何在gazebo和rviz对scout mini小车进行仿真,并且测试了添加自定义的传感器,在本文章中将进一步介绍如何利用scout mini小车 在仿真环境中建图和导航。
仓库链接: https://gitee.com/agent-explorer/robotics/tree/master/scout_mini_navigation
1.仿真环境准备
直接复制仓库链接:https://gitee.com/agent-explorer/robotics/tree/master/scout_mini_navigation 。
进入到scout_mini_navigation中,配置好ROS环境后直接运行setup.bash脚本,自动安装相关环境。
sudo bash setup.bash
catkin_make
source devel.setup.bash
这里需要注意:在setup.bash过程中可能出现gazebo有关包错误,可以自行官网下载
2. 仿真建图
2.1 运行gmapping
在确保安装好gazebo模型之后(后续地图会用到gazebo模型,需要提前下载),直接使用gmapping建图。
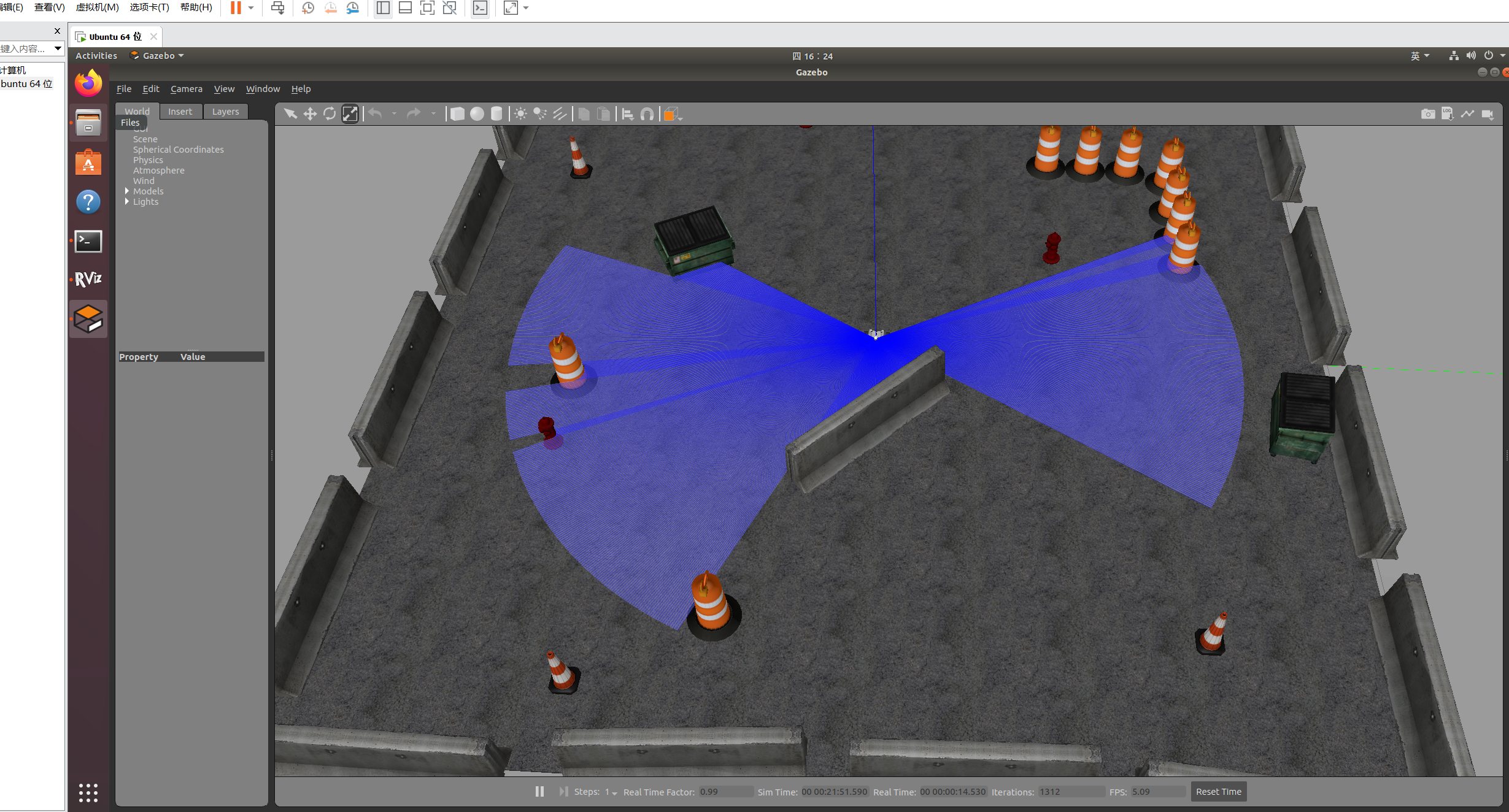
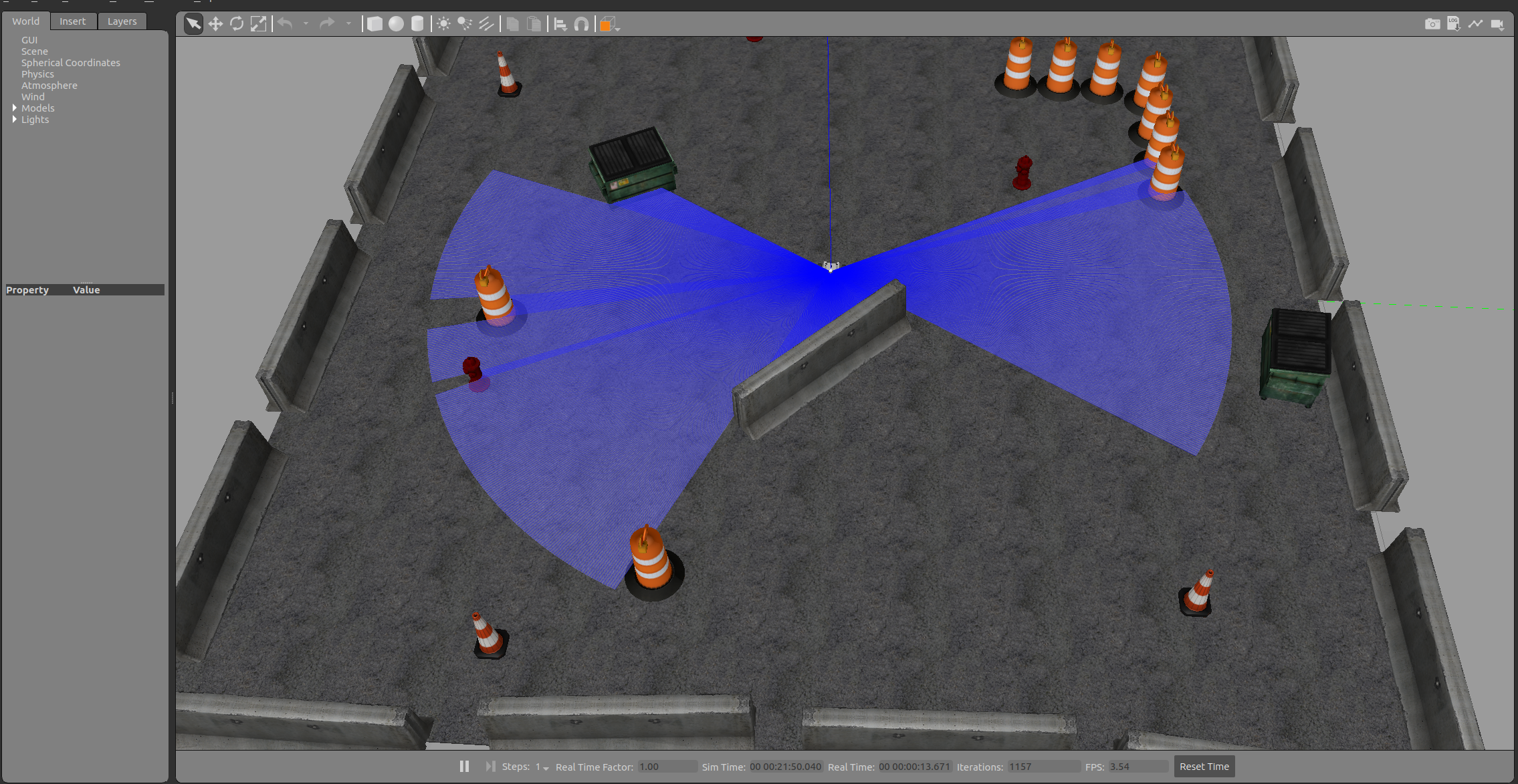
roslaunch scout_gazebo_sim scout_mini_gmapping.launch
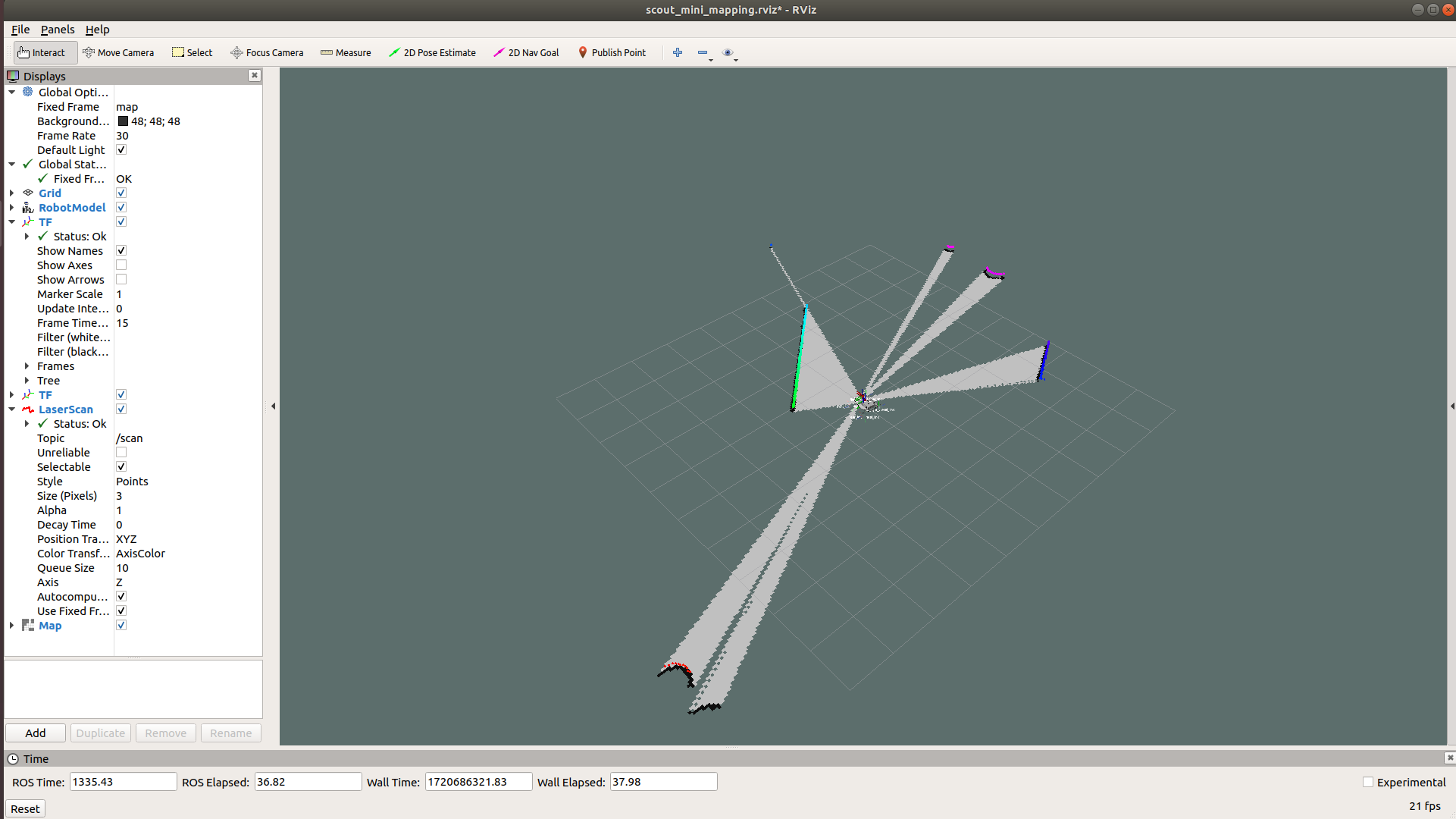
打开以下窗口则证明gmapping正常工作。
2.2 环境探索建图
之后打开一个新的终端,运行键盘控制节点,控制小车探索环境:
rosrun tele_twist_keyboard teleop_twist_keyboard.py
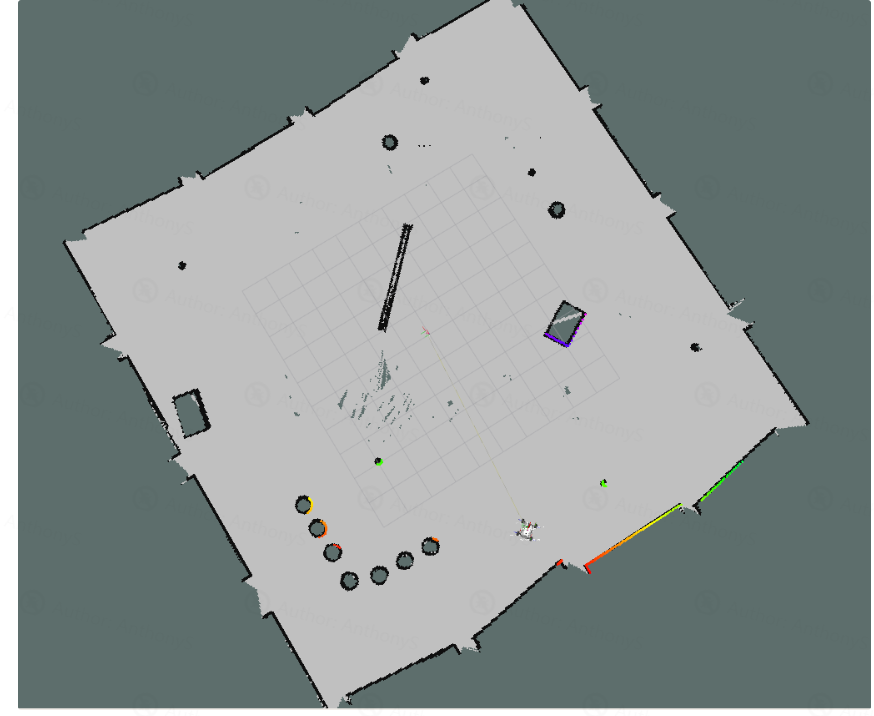
控制车辆在地图中行走,直到将整幅地图构建完毕
2.3 地图保存
运行下面命令保存构建好的地图
cd src/scout_gazebo_sim/maps/
rosrun map_server map_saver -f testmap
即可在工作空间看到保存的地图:
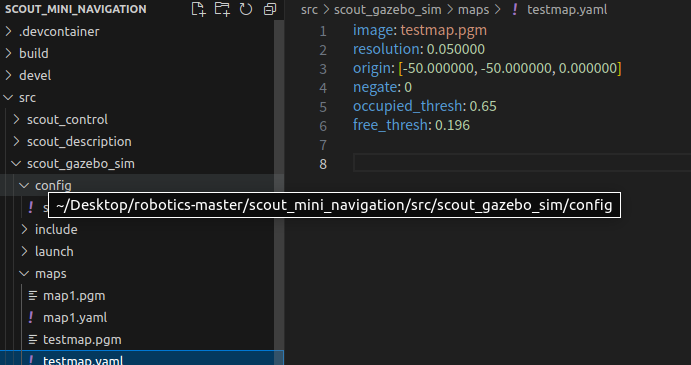
这里需要注意
testmap.yaml中image属性是相对路径,如果是绝对路径则会出现问题
2.4 自主导航
启动导航launch
roslaunch scout_gazebo_sim scout_mini_navigation.launch
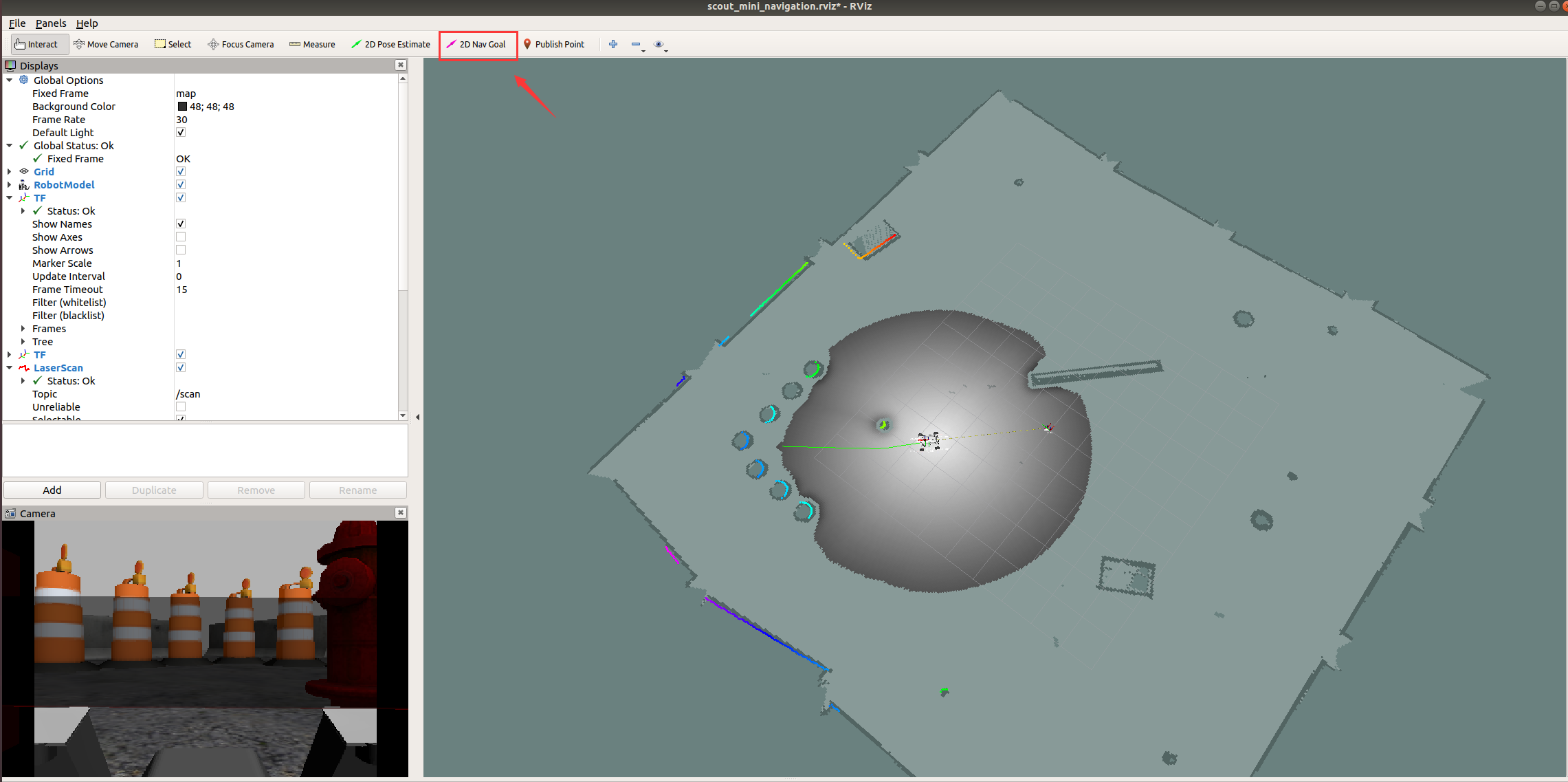
看到如下界面代表成功启动:
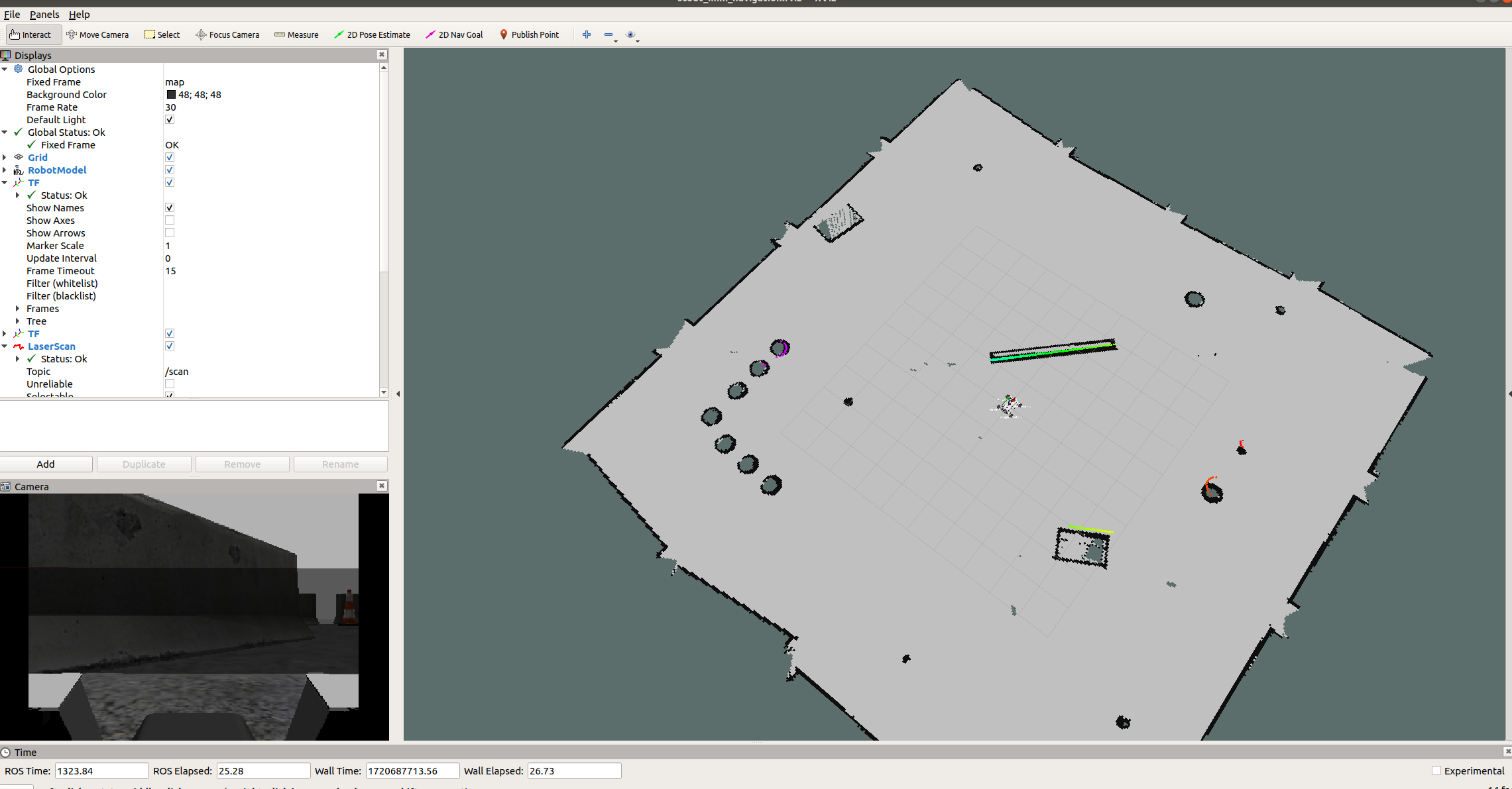
点击2D Nav Goal 选择目标点,小车可以完成自主导航。
3.传感器配置
在之前的文章中介绍了如何自定义添加相机传感器,本章将进一步介绍如何添加激光雷达和imu两个传感器,相关配置均在 scout_description/urdf/empty.urdf中。
3.1 添加激光雷达
Gazebo提供了ray标签用于自定义激光雷达,ray包含了scan和range两个属性。scan描述激光雷达水平和垂直方向上的采样线数,range定义每束激光的属性。
Code
<ray>
<scan>
<horizontal>
<!--- 水平方向上生成 720 条采样线 --->
<samples>720</samples>
<!--- 返回的范围数据点的个数 = 分辨率 * 样本数 --->
<resolution>1</resolution>
<!--- 最大和最小角度,弧度制。决定激光雷达扇形的范围 --->
<min_angle>-2.09439504</min_angle>
<max_angle>2.09439504</max_angle>
</horizontal>
</scan>
<range>
<!--- 每个采样线的 最小距离 和 最大距离 以及 分辨率 --->
<min>0.05</min>
<max>8.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<!--- 添加高斯噪声 --->
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
ray标签支持的所有属性可以在 http://sdformat.org/spec?ver=1.6&elem=sensor#sensor_ray 找到
之后我们还需要添加 Gazebo 雷达插件广播我们雷达的信息:
Code
<plugin name="sensor_ray_controller" filename="libgazebo_ros_laser.so">
<topicName>/scan</topicName> <!--- 雷达信息广播话题名 --->
<frameName>sensor_ray</frameName> <!--- 和雷达 link 名称一致 --->
</plugin>
可用插件可以在 https://classic.gazebosim.org/tutorials
tut=ros_gzplugins#Tutorial:UsingGazebopluginswithROS 找到
3.2添加IMU
方法和激光雷达类似,标签属性 http://sdformat.org/spec?ver=1.6&elem=sensor#sensor_imu 。
插件信息 https://classic.gazebosim.org/tutorials?tut=ros_gzplugins#IMUsensor(GazeboRosImuSensor) 。
3.3 Odom发布
在仿真中,我们使用libgazebo_ros_p3d.so插件广播odom。这个插件用于在仿真中获取任意 link 的位姿真值,并通过 odom 格式的消息进行广播。
其具体配置笔者加加在了src/scout_description/urdf/scout_mini.gazebo 中的第 30~39 行:
Code
<plugin name="p3d_base_controller" filename="libgazebo_ros_p3d.so">
<alwaysOn>true</alwaysOn>
<updateRate>50.0</updateRate>
<bodyName>base_link</bodyName> <!--- 广播 base_link 的位姿真值--->
<topicName>odom</topicName> <!--- topic 名称,这里作为 odom 进行广播 --->
<gaussianNoise>0.01</gaussianNoise>
<frameName>world</frameName> <!--- 参考坐标系,根据 odom 定义,这里选择世界原点 --->
<xyzOffsets>0 0 0</xyzOffsets>
<rpyOffsets>0 0 0</rpyOffsets>
</plugin>
4. ROS相关配置
在小车自主建图过程中,最重要的几个ROS包以及功能对应如下:
├── move_base :导航包,根据参照的消息进行路径规划;
├── gmapping :根据激光数据建立地图;
├── amcl : 用于在已知地图中定位;
└── mapserver :用于保存地图为YAML格式
此外还有:
|——robot_pose_ekf :是 ROS 中实现多传感器融合输出机器人位姿的程序包。
4.1 robot_pose_ekf
robot_pose_ekf 是 ROS 中实现多传感器融合输出机器人位姿的程序包。其基本原理是利用扩展卡尔曼滤波,利用多种传感器实现机器人位姿的最优估计。官方百科:http://wiki.ros.org/robot_pose_ekf
在本例中其配置如下:
Code
<node pkg="robot_pose_ekf" name="robot_pose_ekf" type="robot_pose_ekf">
<param name="output_frame" value="odom" /> <!--- 发布 tf 名为 odom --->
<param name="base_footprint_frame" value="base_link"/> <!--- 建立 output_frame->base_link 的 tf 变换--->
<param name="freq" value="50.0"/>
<param name="sensor_timeout" value="1.0"/>
<param name="odom_used" value="true"/> <!--- 使用原始 odom 信息--->
<param name="odom_data" value="odom"/>
<param name="vo_used" value="false"/> <!--- 不使用视觉里程计 --->
</node>
4.2 gmapping
在建图环节,我们使用的是gmapping,它可以只用 激光雷达和 里程计 信息进行建图,其启动文件位于 src/scout_gazebo_sim/launch/scout_mini_gmapping.launch 对于本例中使用 2D 激光雷达 在 小型场景 中建图,gmapping 可以达到相当不错的效果。官方文档:http://wiki.ros.org/gmapping
gmapping 本身需要订阅 tf 和 scan 两个话题以获取 tf 变换数据 和 激光雷达数据。
其次,gmapping 需要 激光雷达坐标 到 base_link 的 tf 变换(本例中由 robot_state_publisher 包自动发布):

以及 odom 和 base_link 之间的变换(由 robot_pose_ekf 发布融合数据):
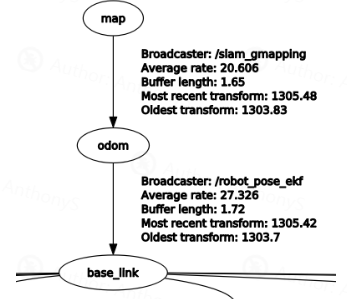
在正确配置 tf 树以及 topic 后即可让我们的车辆开始运动,gmapping 会实时更新地图数据。
4.3 map_server
官方文档地址:http://wiki.ros.org/map_server
用于提供map_server 和 map_saver 功能。其中 map_saver 是一个命令行工具,用于保存地图数据为 YAML 格式的文件:
YAML
image: map1.pgm # 地图对应图片的路径名;可以是绝对路径,也可以相对于 YAML 文件位置的相对路径. 用不同的像素颜色描述世界中每个cell的占用状态。白色像素表示free,黑色像素表示occupied, 其它颜色像素表示unknown
resolution: 0.050000 # 分辨率 米/像素
origin: [-50.000000, -50.000000, 0.000000] # 地图左下像素的2-D姿势(x,y,yaw),yaw 为逆时针旋转角度(YAW = 0表示无旋转)。系统的许多部分目前忽略了 yaw
negate: 0 # 是否翻转黑白像素代表的含义
occupied_thresh: 0.65 # 占用概率大于此阈值的像素被认为是完全占用的
free_thresh: 0.196 # 用概率小于此阈值的像素被认为是自由的
当作为 map_server 使用时创建一个 map_server 节点,利用从磁盘读取的地图数据提供 ROS 服务。map_server 的当前实现将 MAP 图像数据中的颜色值转换为三元占用值:Free(0),占用(100)和未知(-1)。
一个简单的 launch 例子如下:
<node pkg="map_server" type="map_server" name="map_server" args="$(find scout_gazebo_sim)/maps/$(arg map_name).yaml" output="screen">
<param name="frame_id" value="map"/>
</node>
4.4 amcl
amcl 是一个用于 2D 移动机器人的定位系统,其实现了自适应(或 KLD 采样)蒙特卡洛定位方法,该方法使用粒子群算法来跟踪机器人在已知地图上的位姿,仅使用已知地图和激光雷达信息即可运行。官方文档:http://wiki.ros.org/amcl
其配置信息位于 src/scout_gazebo_sim/param/amcl_params_diff.yaml 一般情况下保持默认即可。
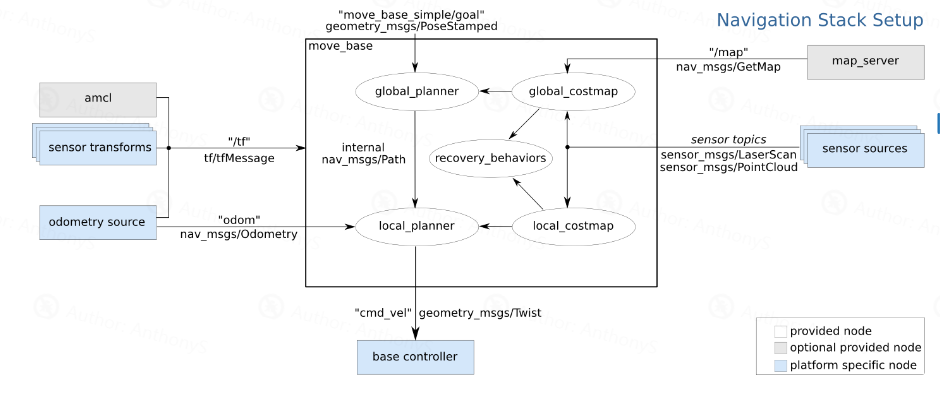
4.5 move_base
官方文档地址:http://wiki.ros.org/move_bas
move_base 就是我们导航系统的核心组件了,给定一个地图上的目标,它会尝试计算全局路径和局部路径用于导航。使用两个规划器(全局和局部)的意义在于,全局路径可以很理想,但是在移动过程中难免会存在遇到障碍物等问题,这时候就需要局部规划指导机器人移动。其接口信息如图所示(来源:http://wiki.ros.org/move_base)
其配置信息如下:
Code
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find scout_gazebo_sim)/param/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find scout_gazebo_sim)/param/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find scout_gazebo_sim)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find scout_gazebo_sim)/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find scout_gazebo_sim)/param/planner.yaml" command="load" />
<param name="base_global_planner" value="global_planner/GlobalPlanner" />
<param name="planner_frequency" value="1.0" />
<param name="planner_patience" value="5.0" />
<param name="base_local_planner" value="base_local_planner/TrajectoryPlannerROS" />
<param name="controller_frequency" value="5.0" />
<param name="controller_patience" value="15.0" />
<param name="clearing_rotation_allowed" value="true" />
</node>
相关的参数内容较多,除 tf 广播信息 和 节点名称 外大部分参数保持默认信息即可,如有需要可对照官方文档进行修改
5.结语
对于scout_mini 仿真导航的相关介绍到这里就结束了,作为初学者或者使用者,大部分时候我们并不关心软件包或者插件背后的算法实现。笔者同样建议在深入学习其背后原理之前先对其效果有直观感受,在会用的基础上进行深入,如此才能更快理解算法为什么要这样设计以及如何编写属于自己的程序。
参考链接:https://anthonysun256.github.io/scout_mini_navi/
松灵机器人scout mini小车 自主导航(3)——建图导航仿真的更多相关文章
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- QT--图灵机器人
QT--图灵机器人 1.登陆图灵机器人官网注册一个图灵机器人 2.获取apikey 3.pro文件添加 QT += core gui network 4.头文件 #include < ...
- ROS机器人导航仿真(kinetic版本)
准备工作: ubuntu 16.04系统;ROS kinetic版本;ROS包turtlebot,导航包rbx1,模拟器arbotix,可视化rviz 1.安装ubuntu 16.04系统与安装ROS ...
- weiphp---------图灵机器人存在的bug。
1.很多人下载下来weiphp源码以后,配置好了图灵机器人却不能使用.原因是因为他源码里面存在一个小bug 上图红色框框内是他的源码,问题就出在这里. 修改方法: if($result ['code' ...
- 基于RRT的机器人自主探索建图
一.方法讲解: 本项目分为三个部分:机器人周围一定范围内基于RRT的全局检测, 根据上一步检测的未知区域点执行sklearn.cluster.MeanShift聚类,获取聚类中心: 根据聚类中心计算各 ...
- UWB DWM1000 跟随小车原理---一张图演示
更多内容参考论坛:bphero.com.cn
- 机器人自主移动的秘密:实际应用中,SLAM究竟是如何实现的?(二)
博客转载自:https://www.leiphone.com/news/201612/FRzmoEI8Iud6CmT2.html 雷锋网(公众号:雷锋网)按:本文作者SLAMTEC(思岚科技公号sla ...
- 嵌入式大赛PPT
题目:基于SLAM的移动机器人设计 嵌入式PPT应具有的几个部分 1.有哪些硬件 1)小车 2)STM32F429开发板 3)树莓派3b+开发板 4)4g通信模块 5)GPS模块 6)Kinect摄像 ...
- ROS::message_filters中的一个报错(mt::TimeStamp……)
『方便检索』 ros::Time msg_time = mt::TimeStamp<typename mpl::at_c<Messages, i>::type>::value( ...
- SLAM方向国内有哪些优秀公司?
计算机视觉life为读者整理了国内几十家涉及SLAM的优秀公司,涵盖自动驾驶.仓储机器人.服务机器人.无人机.AR.芯片相机等领域. 一 自动/辅助驾驶: 1.百度: 主要产品:自动驾驶软件 百度智能 ...
随机推荐
- P3622 [APIO2007] 动物园 -题解
好写 爱写 没事干 所以有了这篇题解 洛谷P3622 [APIO2007] 动物园 题解 $Link$ hzoi题库 洛谷 题目说的挺繁琐,其实就传达了一个很简单的信息: \(n\)个动物,\(c\) ...
- WPF使用Shape实现复杂线条动画
看到巧用 CSS/SVG 实现复杂线条光效动画的文章,便也想尝试用WPF的Shape配合动画实现同样的效果.ChokCoco大佬的文章中介绍了基于SVG的线条动画效果和通过角向渐变配合 MASK 实现 ...
- 【U8】bom全阶 点击展开按钮,无法获得叶子子阶
经查看 是因为 子件的失效日期与生效日期是相同一天,延后子件的失效日期就可以在点击展开按钮后,看到子阶bom了.
- [COCI2008-2009 #2] PERKET
传送锚点:https://www.luogu.com.cn/problem/P2036 题目描述 Perket 是一种流行的美食.为了做好 Perket,厨师必须谨慎选择食材,以在保持传统风味的同时尽 ...
- 基于 Go 的 Web 框架调研
基于 Go 的 Web 框架调研 概述 调研总体目标 找出适合企业应用后台研发的 Go Web 框架 调研考察方向 项目完善程度: 功能完善: 路由, 模板, 插件/扩展, ORM, 命令行工具, 日 ...
- jQuery实现简单的模态框
<!-- jquery模态框 --> <!DOCTYPE html> <html lang="en"> <head> <met ...
- 使用rem、动态vh自适应移动端
前言 这是我的 模仿抖音 系列文章的第六篇 第一篇:200行代码实现类似Swiper.js的轮播组件 第二篇:实现抖音 "视频无限滑动"效果 第三篇:Vue 路由使用介绍以及添加转 ...
- .NET C#程序启动闪退,在安装或者程序文件下能正常运行,但通过路径却无法运行
.NET C#程序启动闪退,目录导致的问题 这是第2次踩这个坑了,很小的编程细节,容易忽略,所以写个博客,分享给大家. 1.第一次坑:是windows 系统把程序运行成服务,找不到配置文件,原因是以服 ...
- [经验分享] VPS安装爱快
前言:本人是作VPN服务端用,配合域名分流,蛮好用.参考1.送一个阿里云腾讯云安装爱快3.X的文档https://bbs.ikuai8.com/thread-97314-1-1.htmlVPS存在的问 ...
- sql数据的查询
数据的查询操作 子查询 联合查询 多表查收等等 基本查询 模糊查询 分组查询 子查询 基本查询语句 查询表结构中所有字段 ...