POJ 1265 Area (Pick定理 & 多边形面积)
题目链接:POJ 1265
Problem Description
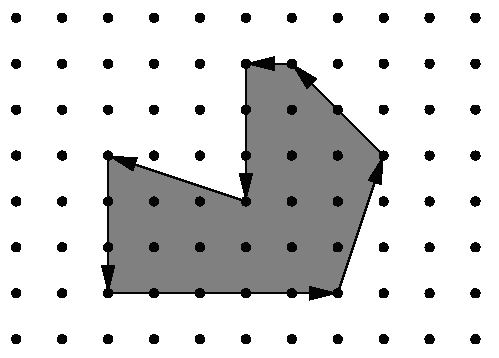
Being well known for its highly innovative products, Merck would definitely be a good target for industrial espionage. To protect its brand-new research and development facility the company has installed the latest system of surveillance robots patrolling the area. These robots move along the walls of the facility and report suspicious observations to the central security office. The only flaw in the system a competitor抯 agent could find is the fact that the robots radio their movements unencrypted. Not being able to find out more, the agent wants to use that information to calculate the exact size of the area occupied by the new facility. It is public knowledge that all the corners of the building are situated on a rectangular grid and that only straight walls are used. Figure 1 shows the course of a robot around an example area.
Figure 1: Example area.You are hired to write a program that calculates the area occupied by the new facility from the movements of a robot along its walls. You can assume that this area is a polygon with corners on a rectangular grid. However, your boss insists that you use a formula he is so proud to have found somewhere. The formula relates the number I of grid points inside the polygon, the number E of grid points on the edges, and the total area A of the polygon. Unfortunately, you have lost the sheet on which he had written down that simple formula for you, so your first task is to find the formula yourself.
Input
The first line contains the number of scenarios.
For each scenario, you are given the number m, 3 <= m < 100, of movements of the robot in the first line. The following m lines contain pairs 揹x dy�of integers, separated by a single blank, satisfying .-100 <= dx, dy <= 100 and (dx, dy) != (0, 0). Such a pair means that the robot moves on to a grid point dx units to the right and dy units upwards on the grid (with respect to the current position). You can assume that the curve along which the robot moves is closed and that it does not intersect or even touch itself except for the start and end points. The robot moves anti-clockwise around the building, so the area to be calculated lies to the left of the curve. It is known in advance that the whole polygon would fit into a square on the grid with a side length of 100 units.
Output
The output for every scenario begins with a line containing 揝cenario #i:� where i is the number of the scenario starting at 1. Then print a single line containing I, E, and A, the area A rounded to one digit after the decimal point. Separate the three numbers by two single blanks. Terminate the output for the scenario with a blank line.
Sample Input
2
4
1 0
0 1
-1 0
0 -1
7
5 0
1 3
-2 2
-1 0
0 -3
-3 1
0 -3
Sample Output
Scenario #1:
0 4 1.0
Scenario #2:
12 16 19.0
Source
Solution
题意
给定一个多边形,所有点都在格点上,求多边形内部的点,边上的点和多边形的面积。
思路
Pick定理
Pick 定理:多边形面积 \(A\) 和内部格点数目 \(i\),边上格点数目 \(b\) 的关系为 \(A = i + \frac{b}{2} - 1\) 。
相关证明见 Pick's theorem
多边形面积:按顺序求相邻两点与原点组成的向量的向量的叉积之和。
多边形边上的点:若一条边的两个点都在格点上,则该边上的格点数为 \(gcd(dx, dy)\),\(dx\) 和 \(dy\) 分别为线段横向占的点数和纵向占的点数。
Code
#include <cstdio>
#include <iostream>
#include <vector>
#include <cmath>
#include <algorithm>
using namespace std;
typedef long long ll;
typedef double db;
const db eps = 1e-10;
const db pi = acos(-1.0);
const ll inf = 0x3f3f3f3f3f3f3f3f;
const ll maxn = 1e5 + 10;
inline int dcmp(db x) {
if(fabs(x) < eps) return 0;
return x > 0? 1: -1;
}
class Point {
public:
double x, y;
Point(double x = 0, double y = 0) : x(x), y(y) {}
void input() {
scanf("%lf%lf", &x, &y);
}
bool operator<(const Point &a) const {
return (!dcmp(x - a.x))? dcmp(y - a.y) < 0: x < a.x;
}
bool operator==(const Point &a) const {
return dcmp(x - a.x) == 0 && dcmp(y - a.y) == 0;
}
db dis2(const Point a) {
return pow(x - a.x, 2) + pow(y - a.y, 2);
}
db dis(const Point a) {
return sqrt(dis2(a));
}
db dis2() {
return x * x + y * y;
}
db dis() {
return sqrt(dis2());
}
Point operator+(const Point a) {
return Point(x + a.x, y + a.y);
}
Point operator-(const Point a) {
return Point(x - a.x, y - a.y);
}
Point operator*(double p) {
return Point(x * p, y * p);
}
Point operator/(double p) {
return Point(x / p, y / p);
}
db dot(const Point a) {
return x * a.x + y * a.y;
}
db cross(const Point a) {
return x * a.y - y * a.x;
}
};
Point p[110];
int gcd(int a, int b) {
return b == 0? a: gcd(b, a % b);
}
int main() {
int T;
scanf("%d", &T);
for(int _ = 1; _ <= T; ++_) {
int n;
scanf("%d", &n);
int on = 0;
db s = 0;
for(int i = 1; i <= n; ++i) {
int x, y;
scanf("%d%d", &x, &y);
p[i] = p[i - 1] + Point(x, y);
on += gcd(abs(x), abs(y));
s += (p[i - 1]).cross(p[i]);
}
s *= 0.5;
int in = (int)s - on / 2 + 1;
printf("Scenario #%d:\n", _);
printf("%d %d %.1lf\n\n", in, on, s);
}
return 0;
}
POJ 1265 Area (Pick定理 & 多边形面积)的更多相关文章
- poj 1265 Area (Pick定理+求面积)
链接:http://poj.org/problem?id=1265 Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: ...
- POJ1265——Area(Pick定理+多边形面积)
Area DescriptionBeing well known for its highly innovative products, Merck would definitely be a goo ...
- poj 1265 Area(pick定理)
Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 4373 Accepted: 1983 Description Bein ...
- [poj 1265]Area[Pick定理][三角剖分]
题意: 给出机器人移动的向量, 计算包围区域的内部整点, 边上整点, 面积. 思路: 面积是用三角剖分, 边上整点与GCD有关, 内部整点套用Pick定理. S = I + E / 2 - 1 I 为 ...
- poj 1265 Area( pick 定理 )
题目:http://poj.org/problem?id=1265 题意:已知机器人行走步数及每一步的坐标 变化量 ,求机器人所走路径围成的多边形的面积.多边形边上和内部的点的数量. 思路:1.以 ...
- Area - POJ 1265(pick定理求格点数+求多边形面积)
题目大意:以原点为起点然后每次增加一个x,y的值,求出来最后在多边形边上的点有多少个,内部的点有多少个,多边形的面积是多少. 分析: 1.以格子点为顶点的线段,覆盖的点的个数为GCD(dx,dy),其 ...
- poj 1265 Area 面积+多边形内点数
Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 5861 Accepted: 2612 Description ...
- POJ 1265 Area (pick定理)
题目大意:已知机器人行走步数及每一步的坐标变化量,求机器人所走路径围成的多边形的面积.多边形边上和内部的点的数量. 思路:叉积求面积,pick定理求点. pick定理:面积=内部点数+边上点数/2-1 ...
- pick定理:面积=内部整数点数+边上整数点数/2-1
//pick定理:面积=内部整数点数+边上整数点数/2-1 // POJ 2954 #include <iostream> #include <cstdio> #include ...
随机推荐
- Java泛型方法和构造函数
可以在方法声明中定义类型参数,它们在方法的返回类型之前的尖括号中指定.包含泛型方法声明的类型不必是通用类型.可以在非静态方法声明中使用为泛型类型指定的类型参数. 示例 以下代码显示如何为方法m1()定 ...
- Java DOM解析器 - 解析XML文档
使用DOM的步骤 以下是在使用DOM解析器解析文档使用的步骤. 导入XML相关的软件包. 创建DocumentBuilder 从文件或流创建一个文档 提取根元素 检查属性 检查子元素 导入XML相关的 ...
- java 重新学习 (五)
Set 集合 一.HashSet按照Hash算法存储集合元素(hashCode方法获取hashCode值,根据hashCode值获取元素位置,通过equals判断对象是否相等并且hashCode值是否 ...
- Eclipse快捷键 之 代码追踪
在使用Java编写复杂一些的程序时,你会不会常常对一层层的继承关系和一次次方法的调用感到迷惘呢?幸亏我们有了Eclipse这么好的IDE可以帮我们理清头绪--这就要使用Eclipse强大的代码追踪功能 ...
- Apache和Tomcat的区别是什么?
Apache 和 Tomcat 都是web网络服务器,两者既有联系又有区别,在进行HTML.PHP.JSP.Perl等开发过程中,需要准确掌握其各自特点,选择最佳的服务器配置. Apache是web服 ...
- leetcode.矩阵.378有序矩阵中第K小的元素-Java
1. 具体题目 给定一个 n x n 矩阵,其中每行和每列元素均按升序排序,找到矩阵中第k小的元素.请注意,它是排序后的第k小元素,而不是第k个元素. 示例: matrix = [ [ 1, 5, ...
- KMP算法及实现
#include<cstdio> #include<cmath> #include<cstring> #include<iostream> #inclu ...
- Emacs25.1之后UrlHttpError
Emacs25.1之后UrlHttpError */--> pre.src {background-color: #002b36; color: #839496;} pre.src {backg ...
- [轉]C/C++中的volatile使用時機?
不知各位對volatile(揮發性的)這個字陌不陌生? 我相信大家在一些程式或多或少都看 過這個字眼, 但是究竟要在何種場合用它呢?.當然一定是有需要, C/C++才會有這個保留字, 否則只是增加pr ...
- enovia plm export to sap
UPC creation UPC 结构 PLM 使用的UPC 是 14个数字组成的,兼容. 前两位为 0,后12位为有效数字,在SAP中0会被忽略,符合国际UPC通用 规则, 前一位为0,后13 位为 ...