ros系统(1)
在虚拟机上安装好ros系统之后,打开终端,启动ROS Master,输入roscore命令,结果如下:
再启动小海龟仿真器,输入命令:rosrun turtlesim turtlesim_node,结果如下:
会跳出一个小海龟,再打开一个终端,输入:rosrun turtlesim turtle_teleop_key,启动海龟控制节点,结果如下:
就能用上下左右键来控制小海龟。
再输入rqt_graph命令,就能打开计算图
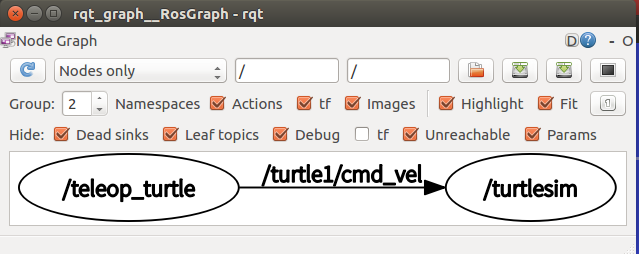
勾上Debug/就可以看到当前系统中重要的节点。
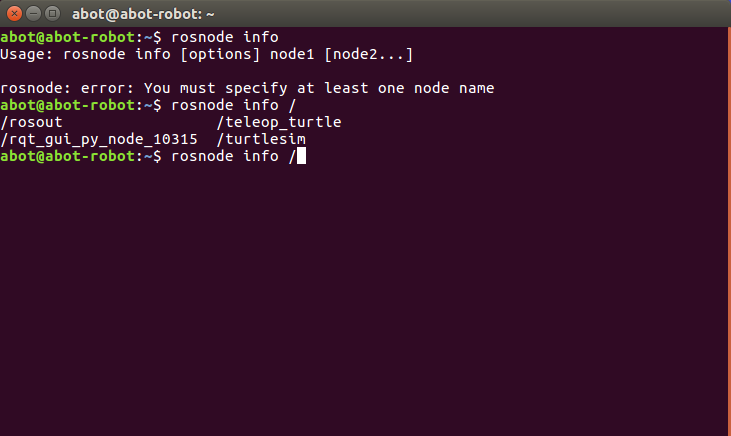
或者rosnode list命令也可以看到当前系统中重要的节点。
想看某一个节点的具体参数,可以输入rosnode info命令再按tab键,可以选择具体的节点。如下:
查看系统当前有哪些话题在发布和订阅,可以使用rostopic list命令,同样,要是想知道某一个具体话题的参数,可以使用rostopic info命令。
要想监听命令信息,可以输入rostopic echo /(something)/,就可以实时看到这个话题具体发布了哪些信息。
可以手动输入信息,让小海龟动起来,打开终端输入rostopic pub-r /turtlet1/cmd_ve geometry_msgs/Twist"linear:

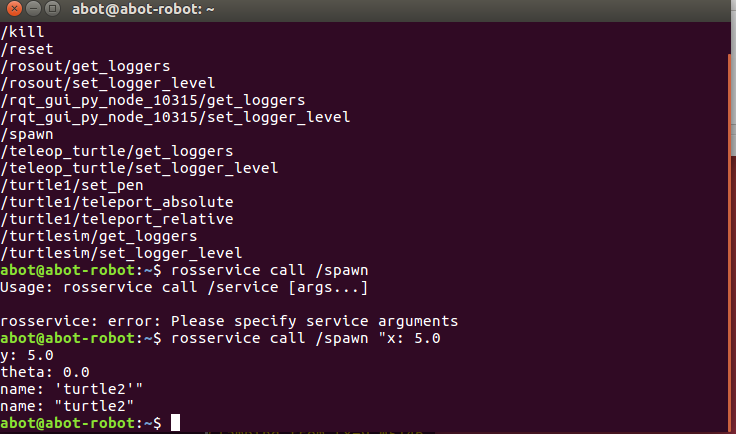
查看系统当前有哪些服务,可以使用rosservice list命令,同样,要是想知道某一个具体话题的参数,可以使用rosservice info命令。
要是想要再生成一个海龟,使用 rosservice call/spawn 利用tab键补充
输入rqt_plot,就可以将海龟的行动通过曲线描绘出来,在topic中选择小海龟的节点
ros系统(1)的更多相关文章
- ROS系统python代码测试之rostest
ROS系统中提供了测试框架,可以实现python/c++代码的单元测试,python和C++通过不同的方式实现, 之后的两篇文档分别详细介绍各自的实现步骤,以及测试结果和覆盖率的获取. ROS系统中p ...
- ROS系统MoveIt玩转双臂机器人系列(一)
一.ROS系统的MoveIt模块简介 机器人操作系统ROS目前最受关注的两个模块是导航(Navigation)和机械臂控制(MoveIt!),其中,机械臂控制模块(后面简称MoveIt)可以让用户快速 ...
- (二)ROS系统架构及概念 ROS Architecture and Concepts 以Kinetic为主更新 附课件PPT
第2章 ROS系统架构及概念 ROS Architecture and Concepts PPT说明: 正文用白色,命令或代码用黄色,右下角为对应中文译著页码. 这一章需要掌握ROS文件系统,运行图级 ...
- ROS机器人程序设计(原书第2版)补充资料 (贰) 第二章 ROS系统架构及概念
ROS机器人程序设计(原书第2版)补充资料 (贰) 第二章 ROS系统架构及概念 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. 由于工作事 ...
- ROS机器人程序设计(原书第2版)补充资料 (壹) 第一章 ROS系统入门
ROS机器人程序设计(原书第2版)补充资料 (壹) 第一章 ROS系统入门 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. 第一章主要包括R ...
- SLAM+语音机器人DIY系列:(二)ROS入门——2.ROS系统整体架构
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- 熟悉ROS系统中的话题
描述:这篇教程主要讲解ROS系统中的话题及rostopic和rqt_plot等命令工具: 1. Setup安装1.1 roscore 首先确保roscore已经启动运行,打开一个新的命令终端,输入如下 ...
- ROS学习笔记二:ROS系统架构及概念
本文主要是了解ROS的系统架构.文件夹结构以及工作所需的核心文件. ROS系统架构主要被设计和划分为三部分,每一部分代表一个层级的概念:文件系统级(The filesystem level).计算图级 ...
- 奥比中光Astra Pro在ROS系统中的使用
奥比中光Astra Pro在ROS系统中的使用 上一次介绍了Astra Pro在ubuntu中的使用,由于Astra Pro使用uvc传输彩色图像,所以当用rqt_image_view窗口 时,看不到 ...
- ROS系统的安装以及卸载
ROS系统的安装 ROS系统的安装方式有两种,通过软件源和源码编译安装.软件源安装只需要通过简单的命令,因此,我们使用软件源来安装ROS 配置系统软件源 打开Ubuntu软件中心的软件源配置界面,勾选 ...
随机推荐
- [2002年NOIP提高组] 均分纸牌
有 N 堆纸牌,编号分别为 1,2,-, N.每堆上有若干张,但纸牌总数必为 N 的倍数.可以在任一堆上取若于张纸牌,然后移动.移牌规则为:在编号为 1 堆上取的纸牌,只能移到编号为 2 的堆上:在编 ...
- [530] C3 Rise Of Darkness Opcodez
[530] C3 Rise Of Darkness Client 00 SendProtocolVersion 01 MoveBackwardToLocation 02 Say 03 RequestE ...
- Samsung Wlan AP 默认口令
网络资产搜索: FoFa 进入页面 输入该产品账户密码 在github上面寻找 End!!!
- rabbitMq安装 - docker
安装rabbitmq 参考网站:https://www.rabbitmq.com/download.html 方式一: 获取rabbit镜像: docker pull rabbitmq:managem ...
- Python基础数据类型-Tuple(元组)
a = () b = (1) # 不是元组类型,是int型 c = (1,) # 只有一个元素的时候,要加逗号才能表示是元组 d = (1, 2, 3, 4, 5, 6, 1) print(type( ...
- 「AutoCAD2022」
「AutoCAD2022」https://www.aliyundrive.com/s/rxktpNqtHC5点击链接保存,或者复制本段内容,打开「阿里云盘」APP ,无需下载极速在线查看,视频原画倍速 ...
- P1413 坚果保龄球
P1413 坚果保龄球 - 洛谷 | 计算机科学教育新生态 (luogu.com.cn) 大家可以发现这里的坚果其实是火爆辣椒2333,那么我们要尽量多消灭僵尸,就需要在僵尸位于1列时在放置(ans+ ...
- 网易面经-hashmap是否能存null(debug源码)
面试时一定要坚持自己的认知,不要让面试官两三下pua了. 结果是可以的 null作为key时被放在了tab下标为0的位置,只能有一个null null作为value时不受限制 虽然说value为nul ...
- docker安装nginx挂载启动
docker pull nginx 命令安装 查找 Docker Hub 上的 nginx 镜像: docker search nginx 这里我们拉取官方的镜像 docker pull nginx ...
- linux-usermod
添加组成员 sudo usermod -aG <targetgroup> <selfuser>