ros系统(1)
在虚拟机上安装好ros系统之后,打开终端,启动ROS Master,输入roscore命令,结果如下:
再启动小海龟仿真器,输入命令:rosrun turtlesim turtlesim_node,结果如下:
会跳出一个小海龟,再打开一个终端,输入:rosrun turtlesim turtle_teleop_key,启动海龟控制节点,结果如下:
就能用上下左右键来控制小海龟。
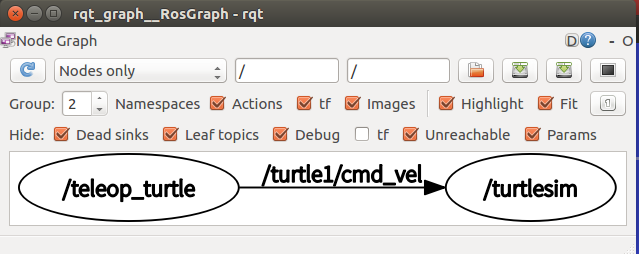
再输入rqt_graph命令,就能打开计算图
勾上Debug/就可以看到当前系统中重要的节点。
或者rosnode list命令也可以看到当前系统中重要的节点。
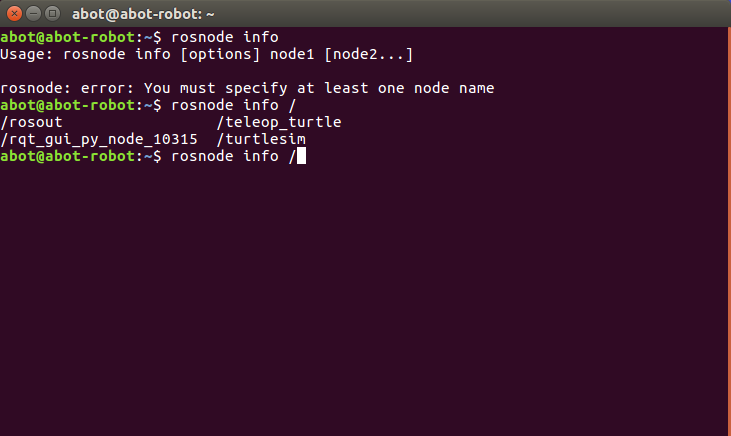
想看某一个节点的具体参数,可以输入rosnode info命令再按tab键,可以选择具体的节点。如下:
查看系统当前有哪些话题在发布和订阅,可以使用rostopic list命令,同样,要是想知道某一个具体话题的参数,可以使用rostopic info命令。
要想监听命令信息,可以输入rostopic echo /(something)/,就可以实时看到这个话题具体发布了哪些信息。
可以手动输入信息,让小海龟动起来,打开终端输入rostopic pub-r /turtlet1/cmd_ve geometry_msgs/Twist"linear:

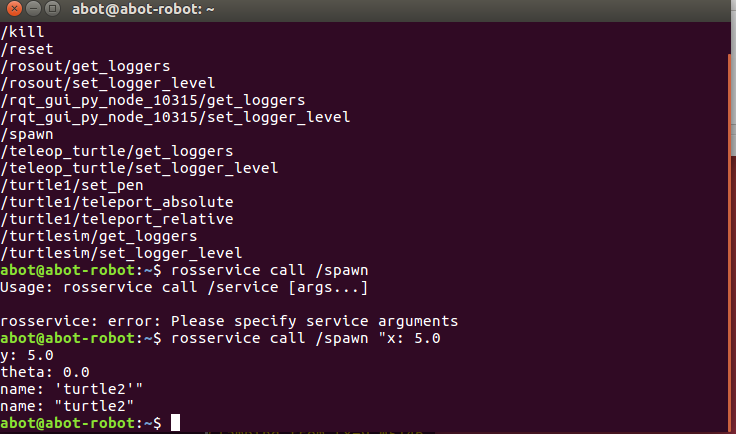
查看系统当前有哪些服务,可以使用rosservice list命令,同样,要是想知道某一个具体话题的参数,可以使用rosservice info命令。
要是想要再生成一个海龟,使用 rosservice call/spawn 利用tab键补充
输入rqt_plot,就可以将海龟的行动通过曲线描绘出来,在topic中选择小海龟的节点
ros系统(1)的更多相关文章
- ROS系统python代码测试之rostest
ROS系统中提供了测试框架,可以实现python/c++代码的单元测试,python和C++通过不同的方式实现, 之后的两篇文档分别详细介绍各自的实现步骤,以及测试结果和覆盖率的获取. ROS系统中p ...
- ROS系统MoveIt玩转双臂机器人系列(一)
一.ROS系统的MoveIt模块简介 机器人操作系统ROS目前最受关注的两个模块是导航(Navigation)和机械臂控制(MoveIt!),其中,机械臂控制模块(后面简称MoveIt)可以让用户快速 ...
- (二)ROS系统架构及概念 ROS Architecture and Concepts 以Kinetic为主更新 附课件PPT
第2章 ROS系统架构及概念 ROS Architecture and Concepts PPT说明: 正文用白色,命令或代码用黄色,右下角为对应中文译著页码. 这一章需要掌握ROS文件系统,运行图级 ...
- ROS机器人程序设计(原书第2版)补充资料 (贰) 第二章 ROS系统架构及概念
ROS机器人程序设计(原书第2版)补充资料 (贰) 第二章 ROS系统架构及概念 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. 由于工作事 ...
- ROS机器人程序设计(原书第2版)补充资料 (壹) 第一章 ROS系统入门
ROS机器人程序设计(原书第2版)补充资料 (壹) 第一章 ROS系统入门 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中使用. 第一章主要包括R ...
- SLAM+语音机器人DIY系列:(二)ROS入门——2.ROS系统整体架构
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- 熟悉ROS系统中的话题
描述:这篇教程主要讲解ROS系统中的话题及rostopic和rqt_plot等命令工具: 1. Setup安装1.1 roscore 首先确保roscore已经启动运行,打开一个新的命令终端,输入如下 ...
- ROS学习笔记二:ROS系统架构及概念
本文主要是了解ROS的系统架构.文件夹结构以及工作所需的核心文件. ROS系统架构主要被设计和划分为三部分,每一部分代表一个层级的概念:文件系统级(The filesystem level).计算图级 ...
- 奥比中光Astra Pro在ROS系统中的使用
奥比中光Astra Pro在ROS系统中的使用 上一次介绍了Astra Pro在ubuntu中的使用,由于Astra Pro使用uvc传输彩色图像,所以当用rqt_image_view窗口 时,看不到 ...
- ROS系统的安装以及卸载
ROS系统的安装 ROS系统的安装方式有两种,通过软件源和源码编译安装.软件源安装只需要通过简单的命令,因此,我们使用软件源来安装ROS 配置系统软件源 打开Ubuntu软件中心的软件源配置界面,勾选 ...
随机推荐
- POJ--2386题C++实现
本题利用深度遍历的穷竭搜索法进行解题,即对每一个元素都对其进行各个方向的深度遍历,穷尽其周围 #include<iostream>#include<cstdio>using n ...
- 将map转为Bean的工具类 BeanUtil
Map<String,Object> pbclwhMainMap = (Map<String,Object>)param.get("pbclwhMain") ...
- LeetCode系列之 (JavaScript) => 53. 最大子数组和
题目描述: leetcode 题目链接: 53. 最大子数组和 - 力扣(LeetCode) (leetcode-cn.com) 解题思路分析: 题干最终的输出是连续子数组的最大和:1. 贪心算法: ...
- backward函数中gradient参数的一些理解
当标量对向量求导时不需要该参数,但当向量对向量求导时,若不加上该参数则会报错,显示"grad can be implicitly created only for scalar output ...
- Docker基本命令之 镜像管理
镜像管理 docker常用基础命令: 查看docker版本信息:docker version 查看docker系统信息:docker info docker服务相关: 查看docker服务:syste ...
- java为什么要使用静态内部类
参考:https://blog.csdn.net/fengyuyeguirenenen/article/details/122696650 static内部类意味着: (1) 为创建一个static内 ...
- python3 文件上传
1 # 文件上传方法 2 def upload_files(filepath, url, headers, data): 3 filename = filepath.split('\\')[-1] 4 ...
- Idea提交文件时,添加不需要提交的文件至.gitignore文件中
1.在Idea中,依次打开File ---->Setting ---> Editor --->File Types 2.在当前编辑栏下方找到Ignore files and fold ...
- uniapp 模拟器的使用
uniapp 模拟器的使用 下载夜深模拟器 uniapp - 工具-设置 adb路径 模拟器路径 模拟器端口号 :26944
- iOS学习十二之选择器控件UIPickerView
UIPickerView是一个简易的列表控件,用于提供有限个数的选项供用户选择. 它是通过代理和数据源的方法对其进行设置和数据源填充的,这种控件的设计模式也是代理模式的应用之一. 添加下面的代码即可实 ...