SPL06-001 气压计
歌尔是全球领先的MEMS厂家,最新推出新款气压传感器SPL06-001,定位精度可达5cm
手册地址
https://download.csdn.net/download/zhangxuechao_/10548473
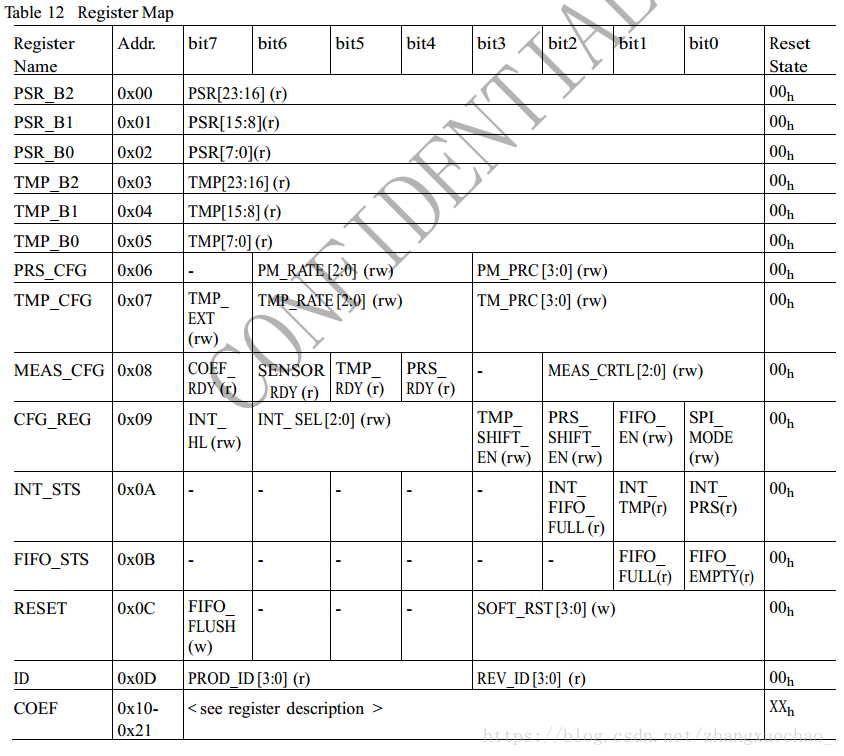
寄存器
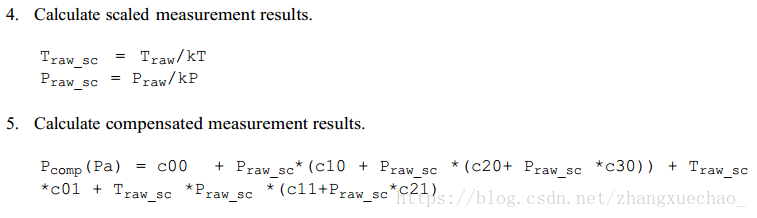
计算方法
举例
//气压测量速率(sample/sec),Background 模式使用
#define PM_RATE_1 (0<<4) //1 measurements pr. sec.
#define PM_RATE_2 (1<<4) //2 measurements pr. sec.
#define PM_RATE_4 (2<<4) //4 measurements pr. sec.
#define PM_RATE_8 (3<<4) //8 measurements pr. sec.
#define PM_RATE_16 (4<<4) //16 measurements pr. sec.
#define PM_RATE_32 (5<<4) //32 measurements pr. sec.
#define PM_RATE_64 (6<<4) //64 measurements pr. sec.
#define PM_RATE_128 (7<<4) //128 measurements pr. sec.
//气压重采样速率(times),Background 模式使用
#define PM_PRC_1 0 //Sigle kP=524288 ,3.6ms
#define PM_PRC_2 1 //2 times kP=1572864 ,5.2ms
#define PM_PRC_4 2 //4 times kP=3670016 ,8.4ms
#define PM_PRC_8 3 //8 times kP=7864320 ,14.8ms
#define PM_PRC_16 4 //16 times kP=253952 ,27.6ms
#define PM_PRC_32 5 //32 times kP=516096 ,53.2ms
#define PM_PRC_64 6 //64 times kP=1040384 ,104.4ms
#define PM_PRC_128 7 //128 times kP=2088960 ,206.8ms
//温度测量速率(sample/sec),Background 模式使用
#define TMP_RATE_1 (0<<4) //1 measurements pr. sec.
#define TMP_RATE_2 (1<<4) //2 measurements pr. sec.
#define TMP_RATE_4 (2<<4) //4 measurements pr. sec.
#define TMP_RATE_8 (3<<4) //8 measurements pr. sec.
#define TMP_RATE_16 (4<<4) //16 measurements pr. sec.
#define TMP_RATE_32 (5<<4) //32 measurements pr. sec.
#define TMP_RATE_64 (6<<4) //64 measurements pr. sec.
#define TMP_RATE_128 (7<<4) //128 measurements pr. sec.
//温度重采样速率(times),Background 模式使用
#define TMP_PRC_1 0 //Sigle
#define TMP_PRC_2 1 //2 times
#define TMP_PRC_4 2 //4 times
#define TMP_PRC_8 3 //8 times
#define TMP_PRC_16 4 //16 times
#define TMP_PRC_32 5 //32 times
#define TMP_PRC_64 6 //64 times
#define TMP_PRC_128 7 //128 times
//SPL06_MEAS_CFG
#define MEAS_COEF_RDY 0x80
#define MEAS_SENSOR_RDY 0x40 //传感器初始化完成
#define MEAS_TMP_RDY 0x20 //有新的温度数据
#define MEAS_PRS_RDY 0x10 //有新的气压数据
#define MEAS_CTRL_Standby 0x00 //空闲模式
#define MEAS_CTRL_PressMeasure 0x01 //单次气压测量
#define MEAS_CTRL_TempMeasure 0x02 //单次温度测量
#define MEAS_CTRL_ContinuousPress 0x05 //连续气压测量
#define MEAS_CTRL_ContinuousTemp 0x06 //连续温度测量
#define MEAS_CTRL_ContinuousPressTemp 0x07 //连续气压温度测量
//FIFO_STS
#define SPL06_FIFO_FULL 0x02
#define SPL06_FIFO_EMPTY 0x01
//INT_STS
#define SPL06_INT_FIFO_FULL 0x04
#define SPL06_INT_TMP 0x02
#define SPL06_INT_PRS 0x01
//CFG_REG
#define SPL06_CFG_T_SHIFT 0x08 //oversampling times>8时必须使用
#define SPL06_CFG_P_SHIFT 0x04
#define SP06_PSR_B2 0x00 //气压值
#define SP06_PSR_B1 0x01
#define SP06_PSR_B0 0x02
#define SP06_TMP_B2 0x03 //温度值
#define SP06_TMP_B1 0x04
#define SP06_TMP_B0 0x05
#define SP06_PSR_CFG 0x06 //气压测量配置
#define SP06_TMP_CFG 0x07 //温度测量配置
#define SP06_MEAS_CFG 0x08 //测量模式配置
#define SP06_CFG_REG 0x09
#define SP06_INT_STS 0x0A
#define SP06_FIFO_STS 0x0B
#define SP06_RESET 0x0C
#define SP06_ID 0x0D
#define SP06_COEF 0x10 //-0x21
#define SP06_COEF_SRCE 0x28
static float _kT,_kP;
static float _Temp,_Press;
uint8_t spl06_init(void)
{
uint8_t coef[18];
uint8_t id;
if(spl06_write_reg(SP06_RESET,0x89))
{
puts("spl06 reset fail\r\n");
return 1;
}
id = spl06_read_reg(SP06_ID);
if(id != 0x10)
{
puts("sol06 id error !!!\r\n");
}
//delay_ms(200); //复位后系数准备好需要至少40ms
spl06_read_buffer(SP06_COEF,coef,18);
_C0 = ((int16_t)coef[0]<<4 ) + ((coef[1]&0xF0)>>4);
_C0 = (_C0&0x0800)?(0xF000|_C0):_C0;
_C1 = ((int16_t)(coef[1]&0x0F)<<8 ) + coef[2];
_C1 = (_C1&0x0800)?(0xF000|_C1):_C1;
_C00 = ((int32_t)coef[3]<<12 ) + ((uint32_t)coef[4]<<4 ) + (coef[5]>>4);
_C10 = ((int32_t)(coef[5]&0x0F)<<16 ) + ((uint32_t)coef[6]<<8 ) + coef[7];
_C00 = (_C00&0x080000)?(0xFFF00000|_C00):_C00;
_C10 = (_C10&0x080000)?(0xFFF00000|_C10):_C10;
_C01 = ((int16_t)coef[8]<<8 ) + coef[9];
_C11 = ((int16_t)coef[10]<<8 ) + coef[11];
_C11 = (_C11&0x0800)?(0xF000|_C11):_C11;
_C20 = ((int16_t)coef[12]<<8 ) + coef[13];
_C20 = (_C20&0x0800)?(0xF000|_C20):_C20;
_C21 = ((int16_t)coef[14]<<8 ) + coef[15];
_C21 = (_C21&0x0800)?(0xF000|_C21):_C21;
_C30 = ((int16_t)coef[16]<<8 ) + coef[17];
_C30 = (_C30&0x0800)?(0xF000|_C30):_C30;
spl06_config_pressure(PM_RATE_128,PM_PRC_64);
spl06_config_temperature(PM_RATE_8,TMP_PRC_8);
spl06_start(MEAS_CTRL_ContinuousPressTemp); //启动连续的气压温度测量
delay_ms(20);
return 0;
}
void spl06_start(uint8_t mode)
{
spl06_write_reg(SP06_MEAS_CFG, mode);
}
void spl06_config_temperature(uint8_t rate,uint8_t oversampling)
{
switch(oversampling)
{
case TMP_PRC_1:
_kT = 524288;
break;
case TMP_PRC_2:
_kT = 1572864;
break;
case TMP_PRC_4:
_kT = 3670016;
break;
case TMP_PRC_8:
_kT = 7864320;
break;
case TMP_PRC_16:
_kT = 253952;
break;
case TMP_PRC_32:
_kT = 516096;
break;
case TMP_PRC_64:
_kT = 1040384;
break;
case TMP_PRC_128:
_kT = 2088960;
break;
}
spl06_write_reg(SP06_TMP_CFG,rate|oversampling|0x80); //温度每秒128次测量一次
if(oversampling > TMP_PRC_8)
{
uint8_t temp = spl06_read_reg(SP06_CFG_REG);
spl06_write_reg(SP06_CFG_REG,temp|SPL06_CFG_T_SHIFT);
}
}
void spl06_config_pressure(uint8_t rate,uint8_t oversampling)
{
switch(oversampling)
{
case PM_PRC_1:
_kP = 524288;
break;
case PM_PRC_2:
_kP = 1572864;
break;
case PM_PRC_4:
_kP = 3670016;
break;
case PM_PRC_8:
_kP = 7864320;
break;
case PM_PRC_16:
_kP = 253952;
break;
case PM_PRC_32:
_kP = 516096;
break;
case PM_PRC_64:
_kP = 1040384;
break;
case PM_PRC_128:
_kP = 2088960;
break;
}
spl06_write_reg(SP06_PSR_CFG,rate|oversampling);
if(oversampling > PM_PRC_8)
{
uint8_t temp = spl06_read_reg(SP06_CFG_REG);
spl06_write_reg(SP06_CFG_REG,temp|SPL06_CFG_P_SHIFT);
}
}
int32_t spl06_get_pressure_adc()
{
uint8_t buf[3];
int32_t adc;
spl06_read_buffer(SP06_PSR_B2,buf,3);
adc = (int32_t)(buf[0]<<16) + (buf[1]<<8) + buf[2];
adc = (adc&0x800000)?(0xFF000000|adc):adc;
return adc;
}
int32_t spl06_get_temperature_adc()
{
uint8_t buf[3];
int32_t adc;
spl06_read_buffer(SP06_TMP_B2,buf,3);
adc = (int32_t)(buf[0]<<16) + (buf[1]<<8) + buf[2];
return adc;
}
void spl06_update_pressure()
{
float Traw_src, Praw_src;
float qua2, qua3;
Traw_src = _kT * _raw_temp;
Praw_src = _kP * _raw_press;
//计算温度
_Temp = 0.5f*_C0 + Traw_src * _C1;
//计算气压
qua2 = _C10 + Praw_src * (_C20 + Praw_src* _C30);
qua3 = Traw_src * Praw_src * (_C11 + Praw_src * _C21);
_Press = _C00 + Praw_src * qua2 + Traw_src * _C01 + qua3;
}
void spl06_update()
{
_raw_temp = spl06_get_temperature_adc();
_raw_press = spl06_get_pressure_adc();
spl06_update_pressure();
}
float spl06_get_temperature()
{
return _Temp;
}
float spl06_get_pressure()
{
return _Press;
}
uint8_t spi2_write_reg(uint8_t reg_addr,uint8_t reg_val)
{
spi2_read_write_byte(reg_addr&0x7f);
spi2_read_write_byte(reg_val);
return 0;
}
uint8_t spi2_read_reg(uint8_t reg_addr)
{
spi2_read_write_byte(reg_addr|0x80);
return spi2_read_write_byte(0xff);
}
uint8_t spi2_read_reg_buffer(uint8_t reg_addr,void *buffer,uint16_t len)
{
uint8_t *p = buffer;
uint16_t i;
spi2_read_write_byte(reg_addr|0x80);
for(i=0;i<len;i++)
{
*p++= spi2_read_write_byte(0xff);
}
return 0;
}SPL06-001 气压计的更多相关文章
- swift 001
swift 001 = 赋值是没有返回值的 所以 int a=10; int b=20; if(a=b){ printf("这个是错误的"); } swift 中的模运算 是支 ...
- [SDK2.2]Windows Azure Virtual Network (4) 创建Web Server 001并添加至Virtual Network
<Windows Azure Platform 系列文章目录> 在上一章内容中,笔者已经介绍了以下两个内容: 1.创建Virtual Network,并且设置了IP range 2.创建A ...
- 《zw版·Halcon-delphi系列原创教程》 Halcon分类函数001·3D函数
<zw版·Halcon-delphi系列原创教程> Halcon分类函数001·3D函数 为方便阅读,在不影响说明的前提下,笔者对函数进行了简化: :: 用符号“**”,替换:“proce ...
- Android 开发错误信息001
Error:Execution failed for task ':app:dexDebug'. > com.android.ide.common.process.ProcessExceptio ...
- python解无忧公主的数学时间编程题001.py
python解无忧公主的数学时间编程题001.py """ python解无忧公主的数学时间编程题001.py http://mp.weixin.qq.com/s?__b ...
- php大力力 [005节] php大力力简单计算器001
2015-08-22 php大力力005. php大力力简单计算器001: 上网看视频,看了半天,敲击代码,如下: <html> <head> <title>简单计 ...
- php大力力 [001节]2015-08-21.php在百度文库的几个基础教程新手上路日记 大力力php 大力同学 2015-08-21 15:28
php大力力 [001节]2015-08-21.php在百度文库的几个基础教程新手上路日记 大力力php 大力同学 2015-08-21 15:28 话说,嗯嗯,就是我自己说,做事认真要用表格,学习技 ...
- Web前端学习笔记(001)
....编号 ........类别 ............条目 ................明细....................时间 一.Web前端学习笔记 ...
- 001 The Hello World In Csharp
C#是面向对象编程语言,语法和JAVA非常相似.接下来让我们看一下C#的Hello world. //001.cs using System; public class Hello { public ...
- nexus-2.13.0-01.war
https://sonatype-download.global.ssl.fastly.net/nexus/oss/nexus-2.13.0-01.war
随机推荐
- Socket-window通讯
#define _WINSOCK_DEPRECATED_NO_WARNINGS #include<WINSOCK2.H> #include<STDIO.H> #include& ...
- USACO Stamps
洛谷 P2725 邮票 Stamps https://www.luogu.org/problem/P2725 JDOJ 1797: Stamps 邮票 https://neooj.com:8082/o ...
- RSA介绍
RSA加密算法是一种非对称加密算法.在公开密钥加密和电子商业中RSA被广泛使用. 公钥(Public Key)与私钥(Private Key)是通过一种算法得到的一个密钥对(即一个公钥和一个私钥),公 ...
- Leetcode142 环形链表
很多题解没有讲清楚非环部分的长度与相遇点到环起点那部分环之间为何是相等的这个数学关系.这里我就补充下为何他们是相等的.假设非环部分的长度是x,从环起点到相遇点的长度是y.环的长度是c.现在走的慢的那个 ...
- BZOJ练习记
决定从头到尾干一波BZOJ!可能会写没几题就停下吧,但还是想学学新姿势啦. 1001. [BeiJing2006]狼抓兔子 即求 $(1, 1)$ 到 $(n, m)$ 的最小割.跑 dinic 即可 ...
- springboot模板(Freemarker与Thymeleaf)
Thymeleaf模板 Thymeleaf就是html页面 导入pom依赖 <dependency> <groupId>org.springframework.boot< ...
- PKUSC2018题解
PKUSC2018题解 真实排名 分别考虑第\(i\)个人翻倍和不翻倍的情况,组合数算一下即可,务必注意实现细节. 代码 最大前缀和 设\(sum_s\)表示集合\(\sum_{i\in s} a_i ...
- [LeetCode] 287. Find the Duplicate Number 寻找重复数
Given an array nums containing n + 1 integers where each integer is between 1 and n (inclusive), pro ...
- C语言实现五子棋
可以称得上史上最简单的五子棋版本了. 可以使用curses库来改进页面和下棋方式. 并且对于输入的坐标没有进行鉴别,如果输入的坐标超过棋盘大小,就会段错误退出. 我改进了一点,但是还是没有完全避免这个 ...
- 远程文件传输命令•RHEL8/CentOS8文件上传下载-用例
scp协议 scp [options] [本地用户名@IP地址:]file1 [远程用户名 @IP 地址 :] file2 options: -v 用来显示进度,可以用来查看连接,认证,或是配置错误. ...