4.2 ROS节点运行管理launch文件
4.2 ROS节点运行管理launch文件
关于 launch 文件的使用我们已经不陌生了,在第一章内容中,就曾经介绍到:
一个程序中可能需要启动多个节点,比如:ROS 内置的小乌龟案例,如果要控制乌龟运动,要启动多个窗口,分别启动 roscore、乌龟界面节点、键盘控制节点。如果每次都调用 rosrun 逐一启动,显然效率低下,如何优化?
采用的优化策略便是使用roslaunch 命令集合 launch 文件启动管理节点,并且在后续教程中,也多次使用到了 launch 文件。
概念
launch 文件是一个 XML 格式的文件,可以启动本地和远程的多个节点,还可以在参数服务器中设置参数。
作用
简化节点的配置与启动,提高ROS程序的启动效率。
使用
以 turtlesim 为例演示
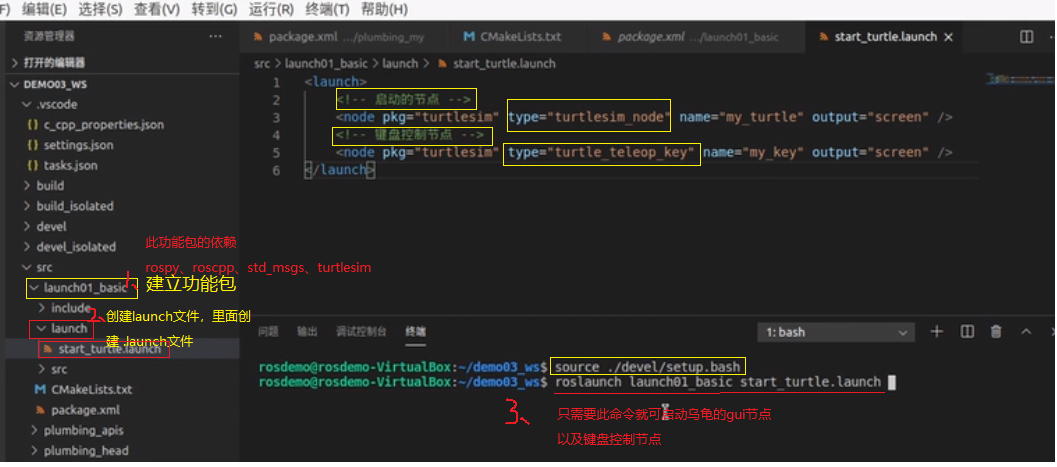
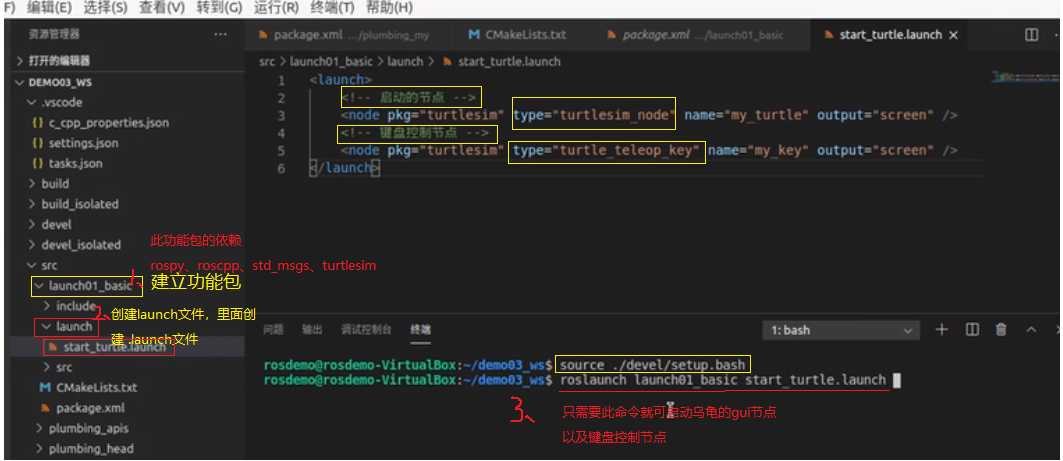
1.新建launch文件
在功能包下添加 launch目录, 目录下新建 xxxx.launch 文件,编辑 launch 文件
<launch>
<node pkg="turtlesim" type="turtlesim_node" name="myTurtle" output="screen" />
<node pkg="turtlesim" type="turtle_teleop_key" name="myTurtleContro" output="screen" />
</launch>
2.调用 launch 文件
roslaunch 包名 xxx.launch
注意:roslaunch 命令执行launch文件时,首先会判断是否启动了 roscore,如果启动了,则不再启动,否则,会自动调用 roscore
PS:本节主要介绍launch文件的使用语法,launch 文件中的标签,以及不同标签的一些常用属性。
另请参考:
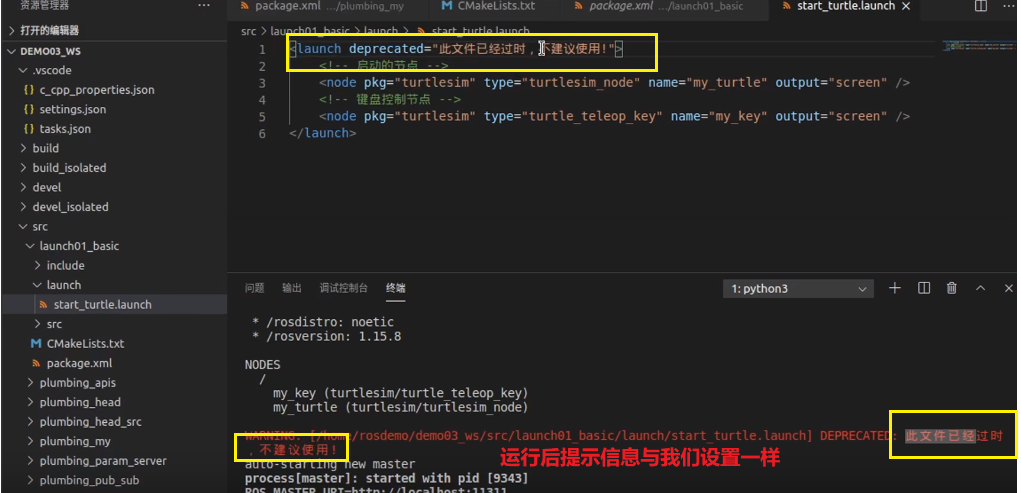
4.2.1 launch文件标签之launch
<launch>标签是所有 launch 文件的根标签,充当其他标签的容器
1.属性
deprecated = "弃用声明"告知用户当前 launch 文件已经弃用
2.子级标签
所有其它标签都是launch的子级
4.2.2 launch文件标签之node
<node>标签用于指定 ROS 节点,是最常见的标签,需要注意的是: roslaunch 命令不能保证按照 node 的声明顺序来启动节点(节点的启动是多进程的)
1.属性
pkg="包名"
节点所属的包
type="nodeType"
节点类型(与之相同名称的可执行文件)
name="nodeName"
节点名称(在 ROS 网络拓扑中节点的名称)
args="xxx xxx xxx" (可选)
将参数传递给节点
machine="机器名"
在指定机器上启动节点
respawn="true | false" (可选)
如果节点退出,是否自动重启
respawn_delay=" N" (可选)
如果 respawn 为 true, 那么延迟 N 秒后启动节点
required="true | false" (可选)
该节点是否必须,如果为 true,那么如果该节点退出,将杀死整个 roslaunch
ns="xxx" (可选)
在指定命名空间 xxx 中启动节点
clear_params="true | false" (可选)
在启动前,删除节点的私有空间的所有参数
output="log | screen" (可选)
日志发送目标,可以设置为 log 日志文件,或 screen 屏幕,默认是 log
2.子级标签
env 环境变量设置
remap 重映射节点名称
rosparam 参数设置
param 参数设置
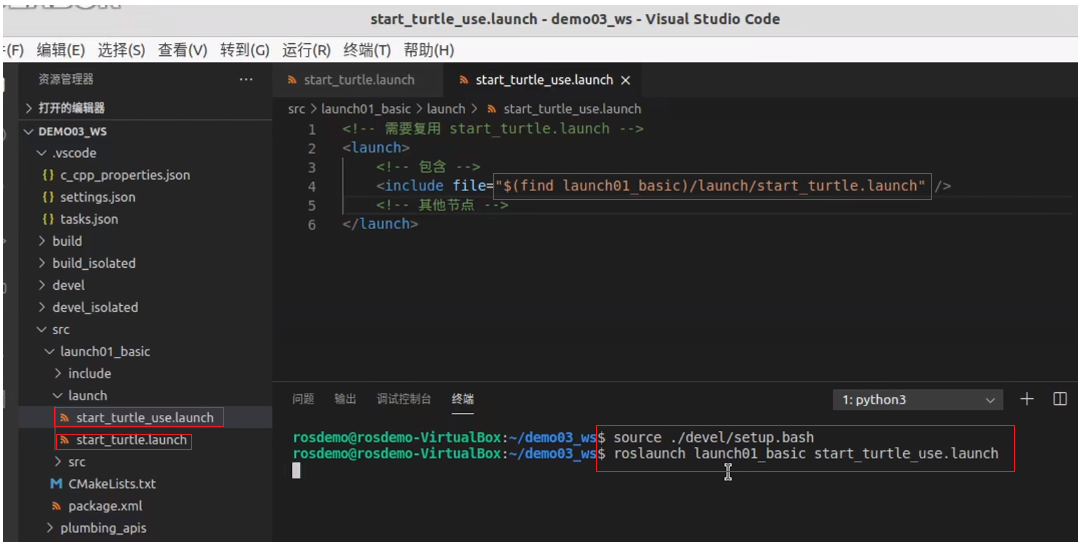
4.2.3 launch文件标签之include
include标签用于将另一个 xml 格式的 launch 文件导入到当前文件
1.属性
file="$(find 包名)/xxx/xxx.launch"
要包含的文件路径
ns="xxx" (可选)
在指定命名空间导入文件
2.子级标签
env 环境变量设置
arg 将参数传递给被包含的文件
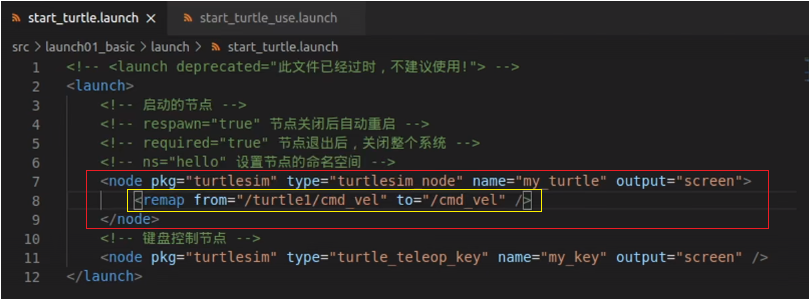
4.2.4 launch文件标签之remap
用于话题重命名
1.属性
from="xxx"
原始话题名称
to="yyy"
目标名称
2.子级标签
- 无
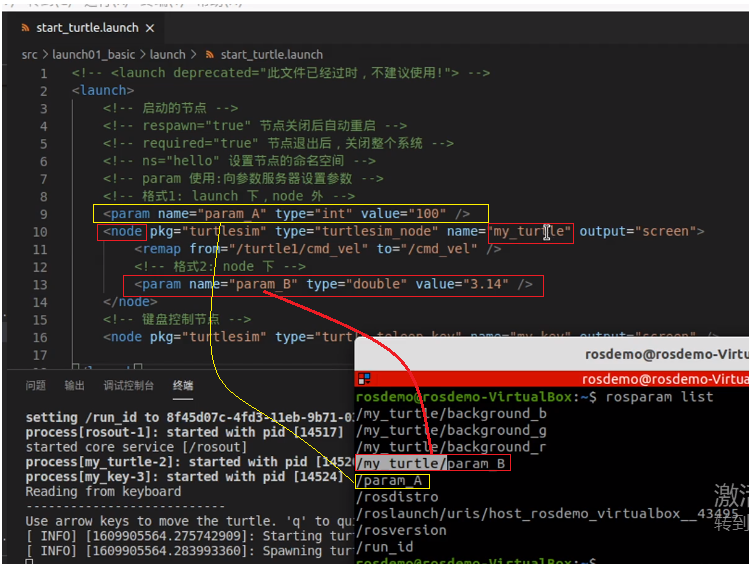
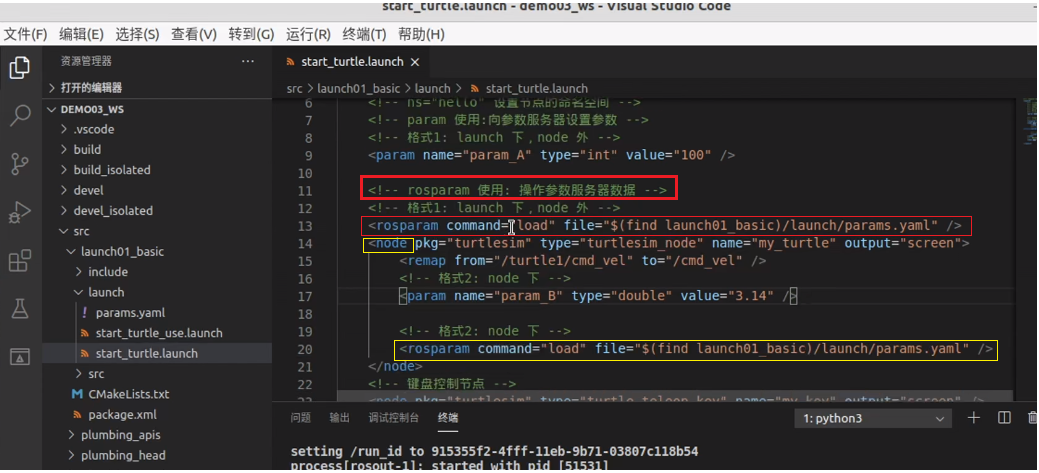
4.2.5 launch文件标签之param
<param>标签主要用于在参数服务器上设置参数,参数源可以在标签中通过 value 指定,也可以通过外部文件加载,在<node>标签中时,相当于私有命名空间。
1.属性
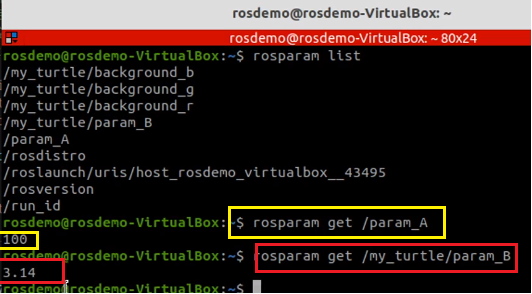
name="命名空间/参数名"
参数名称,可以包含命名空间
value="xxx" (可选)
定义参数值,如果此处省略,必须指定外部文件作为参数源
type="str | int | double | bool | yaml" (可选)
指定参数类型,如果未指定,roslaunch 会尝试确定参数类型,规则如下:
如果包含 '.' 的数字解析未浮点型,否则为整型
"true" 和 "false" 是 bool 值(不区分大小写)
其他是字符串
2.子级标签
- 无
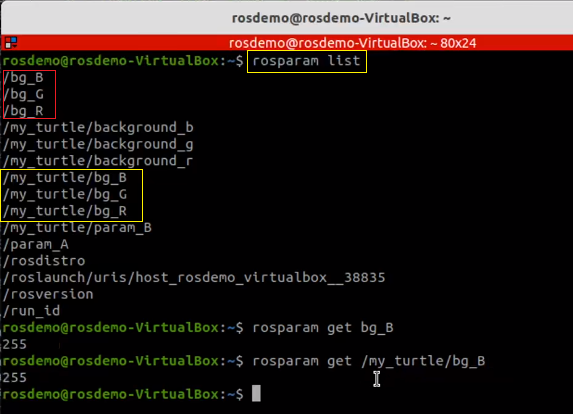
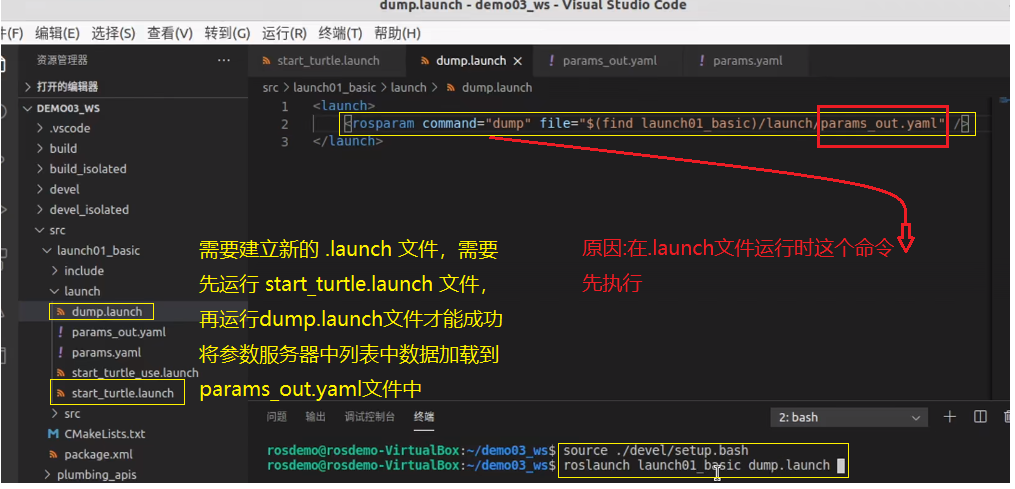
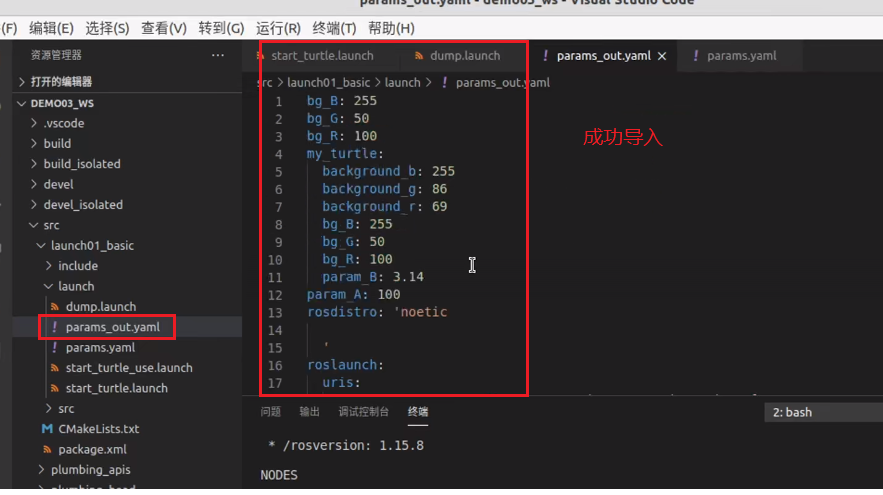
4.2.6 launch文件标签之rosparam
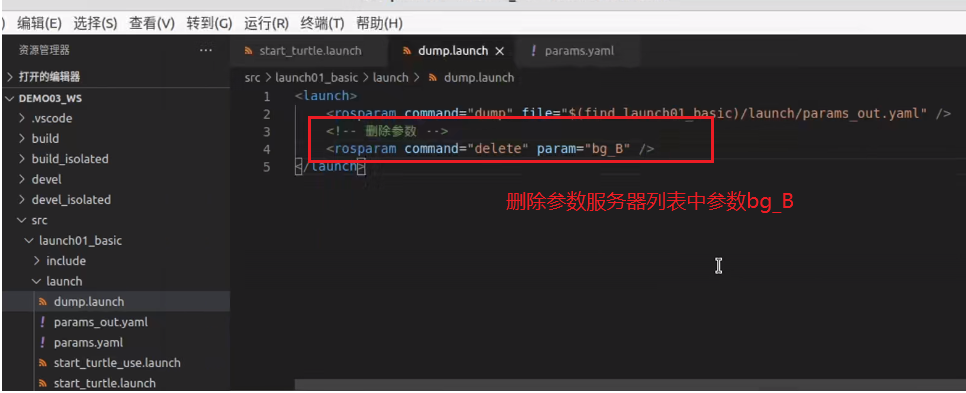
<rosparam>标签可以从 YAML 文件导入参数,或将参数导出到 YAML 文件,也可以用来删除参数,<rosparam>标签在<node>标签中时被视为私有。
1.属性
command="load | dump | delete" (可选,默认 load)
加载、导出或删除参数
file="$(find xxxxx)/xxx/yyy...."
加载或导出到的 yaml 文件
param="参数名称"
ns="命名空间" (可选)
2.子级标签
- 无
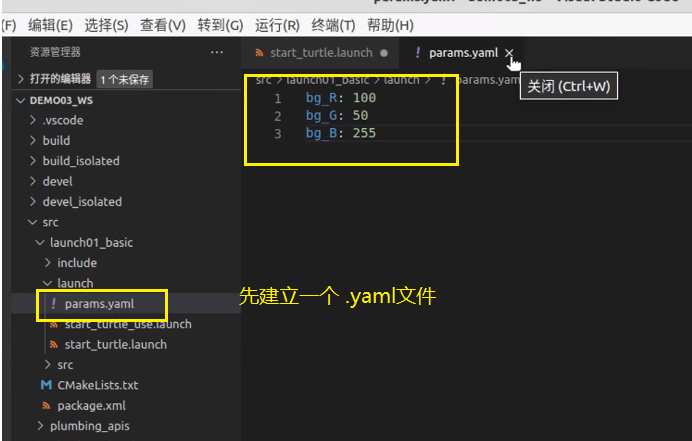
加载操作
导出操作
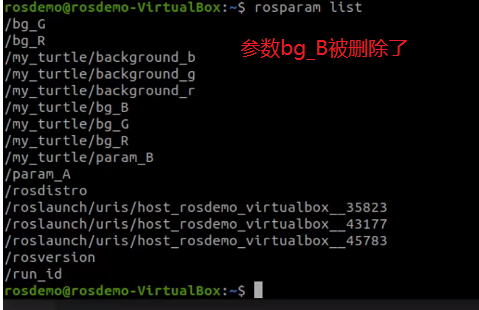
删除操作
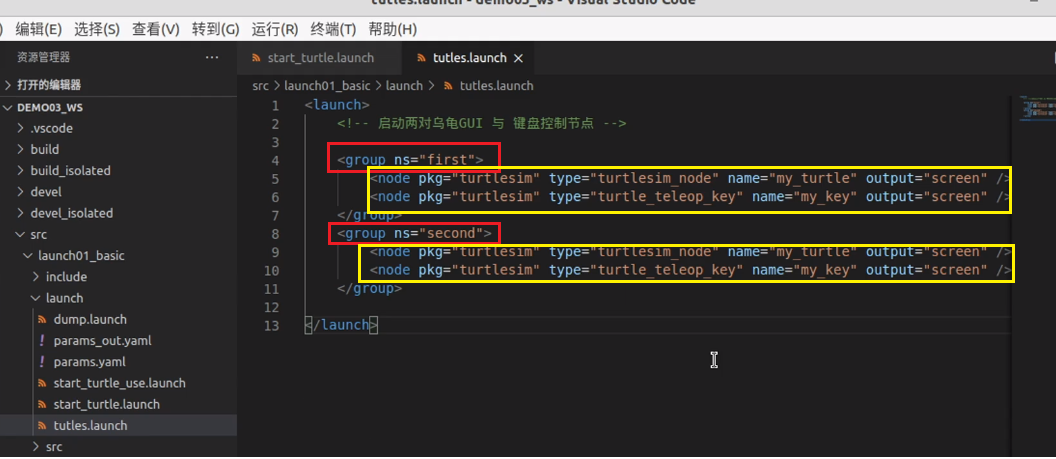
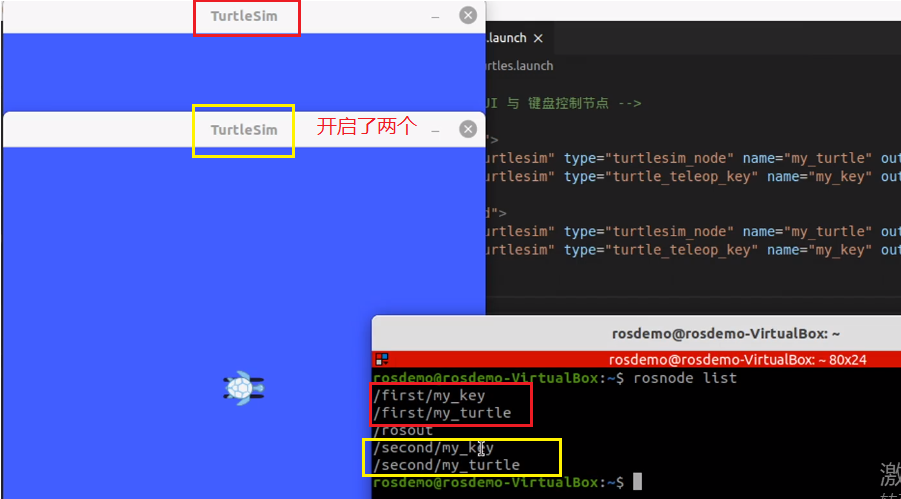
4.2.7 launch文件标签之group
<group>标签可以对节点分组,具有 ns 属性,可以让节点归属某个命名空间
1.属性
ns="名称空间" (可选)
clear_params="true | false" (可选)
启动前,是否删除组名称空间的所有参数(慎用....此功能危险)
2.子级标签
- 除了launch 标签外的其他标
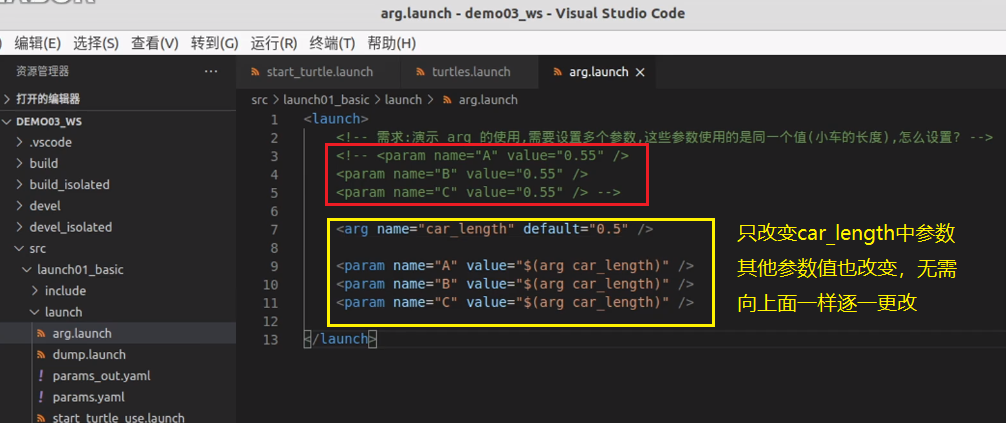
4.2.8 launch文件标签之arg
<arg>标签是用于动态传参,类似于函数的参数,可以增强launch文件的灵活性
1.属性
name="参数名称"
default="默认值" (可选)
value="数值" (可选)
不可以与 default 并存
doc="描述"
参数说明
2.子级标签
- 无
3.示例
launch文件传参语法实现,hello.lcaunch
<launch>
<arg name="xxx" />
<param name="param" value="$(arg xxx)" />
</launch>
命令行调用launch传参
roslaunch hello.launch xxx:=值
4.2 ROS节点运行管理launch文件的更多相关文章
- ROS Learning-010 beginner_Tutorials 编写简单的启动脚本文件(.launch 文件)
ROS Indigo beginner_Tutorials-09 编写简单的启动脚本文件 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.0 ...
- launch文件
launch在ROS应用中,每个节点通常有许多参数需要设置,为了方便高效操作多个节点,可以编写launch文件,然后用roslaunch命令运行roslaunch: roslaunch [option ...
- (八) .launch文件 ---编写简单的启动脚本文件
下面我们将介绍,如何编写一个启动脚本程序:(.launch文件) 还记得我们在 创建ROS软件包教程 中创建的第一个程序包(beginner_tutorials)吗,现在我们要使用它. 在 begin ...
- ROS学习笔记六:xxx.launch文件详解
每当我们需要运行一个ROS节点或工具时,都需要打开一个新的终端运行一个命令.当系统中的节点数量不断增加时,每个节点一个终端的模式会变得非常麻烦.那么有没有一种方式可以一次性启动所有节点呢?答案当然是肯 ...
- 第 4 章 ROS运行管理
第 4 章 ROS运行管理 ROS是多进程(节点)的分布式框架,一个完整的ROS系统实现: 可能包含多台主机:每台主机上又有多个工作空间(workspace):每个的工作空间中又包含多个功能包(pac ...
- ROS启动多launch文件
在ROS工程中经常需要启动好几个launch文件,比较不方便,有下面两种方法可以更高效些: 重写一个大型的launch文件,将所有的节点的启动配置信息都包含进去. 通过bash写一个xxx.sh文件, ...
- Ros学习——launch文件解析
launch文件的重点是:节点(node)元素的集合. roslaunch 则是让所有的节点共享同一个终端. 1.标签(元素)说明 1. group标签 2. node标签 <group ns= ...
- ROS节点分布式运行方法
一. 主机Master设置 1.安装ssh客服端和服务器(ubuntu已默认安装了) 2.机器名与ip绑定 由于/etc/hosts中需要将计算机名和IP绑定,所有最好设置IP地址为静态地址 sudo ...
- 第三课3、ROS的launch文件
1.launch 参数说明: pkg为节点的功能包,type为需要运行的那个节点,name为节点的名字,后面的参数可选 举个例子: 在工作空间中新建一个包: 然后再回到工作空间中去编译: 再在包目录下 ...
随机推荐
- 第九周shell脚本编程练习
转至:http://www.178linux.com/88838 1.写一个脚本,判断当前系统上所有用户的shell是否为可登录shell(即用户的shell不是/sbin/nologin):分别这两 ...
- base64学习笔记
关于是什么: 定义 8Bits字节编码方式之一 应用 传输8Bit字节代码 特性 Base64编码具有不可读性 描述 Base64可以成为密码学的基石,非常重要. 特点 可以将任意的二进制数据进行Ba ...
- laravel7 微信小程序获取openid
l 通过微信公众号获取appid和appsecret l 在小程序页面中编写代码获取code l 在后端编写方法,换取openid l 添加一个按钮,给按钮一个开放能力 open-type=" ...
- [翻译] TensorFlow 分布式之论文篇 "Implementation of Control Flow in TensorFlow"
[翻译] TensorFlow 分布式之论文篇 "Implementation of Control Flow in TensorFlow" 目录 [翻译] TensorFlow ...
- 1251-Client does not support authentication protocol requested by server; consider upgrading MySQL client。
三:出现的一个错误在安装完MySQL的时候,我们现在一般都使用Navicat来连接数据库,可惜出现下面的错误:1251-Client does not support authentication p ...
- ElasticSearch7.3 学习之Mapping核心数据类型及dynamic mapping
1.mapping的核心数据类型以及dynamic mapping 1.1 核心的数据类型 string :text and keyword,byte,short,integer,long,float ...
- Net6 Configuration & Options 源码分析 Part2 Options
Net6 Configuration & Options 源码分析 Part2 Options 第二部分主要记录Options 模型 OptionsConfigurationServiceCo ...
- 2022 年最受瞩目的新特性 CSS @layer 到底是个啥?
步入 2022,CSS 的新特性层出不穷,而最近在 CSS 圈最受瞩目的新特性,非 CSS @layer 莫属. 本文,将用最简洁的语言,快速让读者们搞懂,到底什么是 CSS @layer 新规范. ...
- 全面解析UNIX缓冲区溢出 深度防御体系
首先简要回顾一下缓冲区溢出的攻击大系: ◆栈溢出(stack smashing) 未检查输入缓冲区长度,导致数组越界,覆盖栈中局部变量空间之上的栈桢指针%ebp以及函数返回地址retaddr,当函数返 ...
- Mybatis——一级缓存与二级缓存
关于Mybatis的学习主要参考了狂神的视频 一级缓存 (1).使用范围:从sqlSession会话开始到结束 (2).使用:默认打开,无法关闭 (3).测试使用(需要打开日志观察数据库的连接情况): ...