ros中坐标系管理系统
首先安装小海龟实例的功能包ros-melodic-turtle-tf
qqtsj ~ sudo apt install ros-melodic-turtle-tf
[sudo] qqtsj 的密码:
正在读取软件包列表... 完成
正在分析软件包的依赖关系树
正在读取状态信息... 完成
ros-melodic-turtle-tf 已经是最新版 (0.2.2-0bionic.20191008.205941)。
ros-melodic-turtle-tf 已设置为手动安装。
升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软件包,有 111 个软件包未被升级。
我的ros系统已经安装好了
然后在启动launch文件,这个launch文件相当于一个脚本,可以一次性启动很多节点
qqtsj ~ roslaunch turtle_tf turtle_tf_demo.launch
... logging to /home/qqtsj/.ros/log/42e2c96a-42a0-11ea-b4ee-9822efa1466f/roslaunch-qqtsj-Nitro-AN515-51-8424.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB. started roslaunch server http://qqtsj-Nitro-AN515-51:34609/ SUMMARY
======== PARAMETERS
* /rosdistro: melodic
* /rosversion: 1.14.3
* /scale_angular: 2.0
* /scale_linear: 2.0
* /turtle1_tf_broadcaster/turtle: turtle1
* /turtle2_tf_broadcaster/turtle: turtle2 NODES
/
sim (turtlesim/turtlesim_node)
teleop (turtlesim/turtle_teleop_key)
turtle1_tf_broadcaster (turtle_tf/turtle_tf_broadcaster.py)
turtle2_tf_broadcaster (turtle_tf/turtle_tf_broadcaster.py)
turtle_pointer (turtle_tf/turtle_tf_listener.py) auto-starting new master
process[master]: started with pid [8435]
ROS_MASTER_URI=http://localhost:11311 setting /run_id to 42e2c96a-42a0-11ea-b4ee-9822efa1466f
process[rosout-1]: started with pid [8446]
started core service [/rosout]
process[sim-2]: started with pid [8449]
process[teleop-3]: started with pid [8450]
process[turtle1_tf_broadcaster-4]: started with pid [8451]
process[turtle2_tf_broadcaster-5]: started with pid [8452]
process[turtle_pointer-6]: started with pid [8453]
Reading from keyboard
---------------------------
Use arrow keys to move the turtle.
INFO: cannot create a symlink to latest log directory: [Errno 2] No such file or directory: '/home/qqtsj/.ros/log/latest'
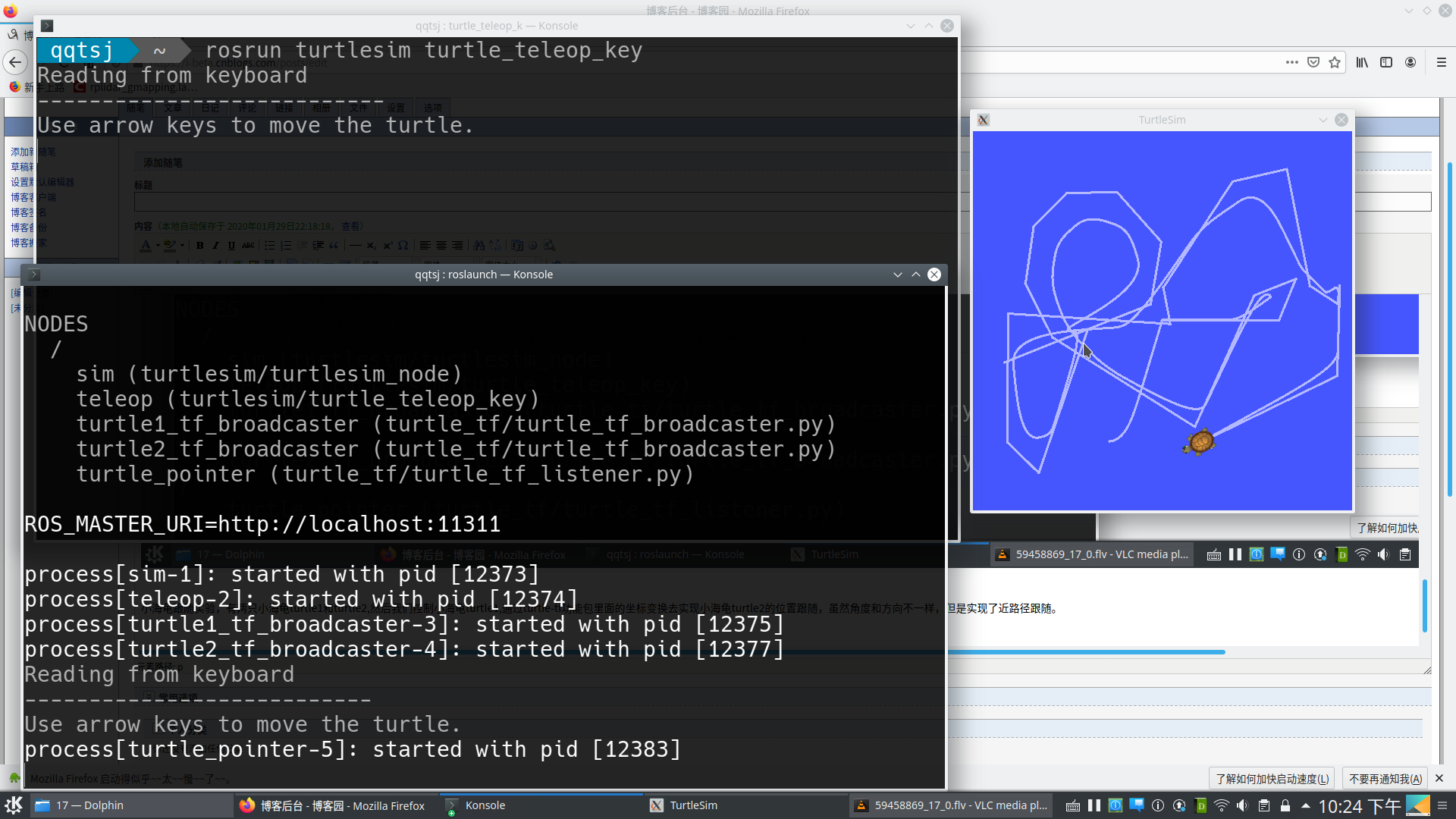
小海龟跟随实验,有两只小海龟turtle1和turtle2,然后我们控制小海龟turtle1,通过turtle-tf功能包里面的坐标变换去实现小海龟turtle2的位置跟随,虽然角度和方向不一样,但是实现了坐标的跟随。
接下来介绍一下跟随的原理,以及一个小工具。
运行$ rosrun tf view_frames 他会先监听5秒钟的时间,然后会生成一个frames.pdf文件
view_frames是tf功能包里面的一个小工具,可以直接可视化看到整个系统中tf之间的关系。
qqtsj ~ rosrun tf view_frames
Listening to /tf for 5.0 seconds
Done Listening
dot - graphviz version 2.40.1 (20161225.0304) Detected dot version 2.40
frames.pdf generated
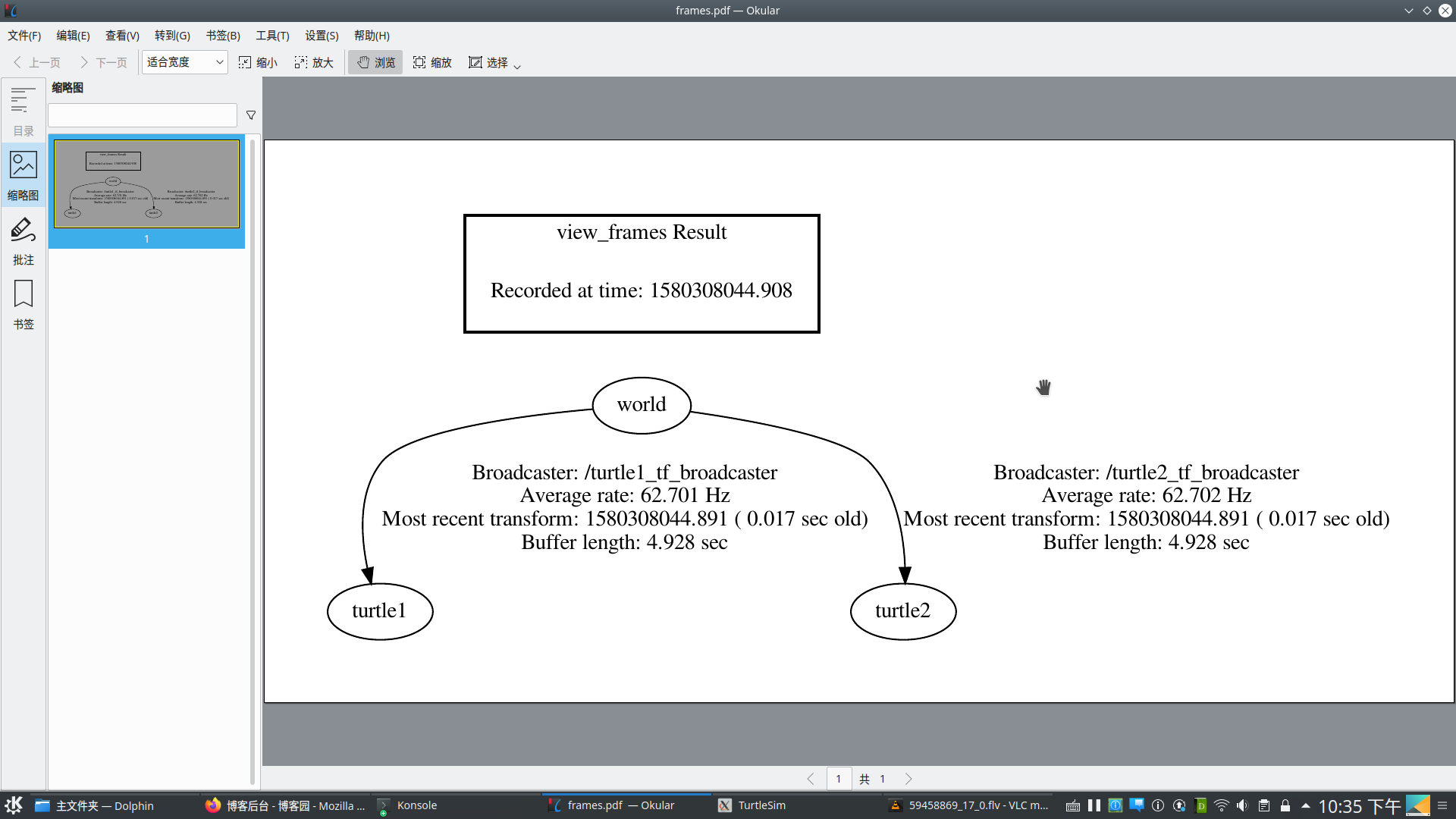
这是当前系统中tf之间的关系, 在当前的两只小海龟的仿真器中有三个坐标系 ,其中word坐标系是全局坐标系,两个小海龟是两个坐标系。
turtle1和turtle2两个坐标系不断的重合到一起,他们相对与word坐标系是不断变化的。
另外还有一个工具更加清楚的观察坐标系之间的关系 tf_echo (可以直接查询坐标系之间的关系)
qqtsj ~ rosrun tf tf_echo turtle1 turtle2
At time 1580309473.964
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
At time 1580309474.700
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
At time 1580309475.691
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
At time 1580309476.699
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
At time 1580309477.692
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
At time 1580309478.700
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
At time 1580309479.691
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
At time 1580309480.699
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
At time 1580309481.691
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
At time 1580309482.700
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
通过控制小海龟,会观察到数据在不断地变化。
ros中坐标系管理系统的更多相关文章
- ROS中利用V-rep进行地图构建仿真
V-rep中显示激光扫描点 在VREP自带的场景中找到practicalPathPlanningDemo.ttt文件,删除场景中多余的物体只保留静态的地图.然后在Model browser→comp ...
- ROS中发布激光扫描消息
激光雷达工作时会先在当前位置发出激光并接收反射光束,解析得到距离信息,而后激光发射器会转过一个角度分辨率对应的角度再次重复这个过程.限于物理及机械方面的限制,激光雷达通常会有一部分“盲区”.使用激光雷 ...
- ROS中msg和srv文件的区别
1.msg和srv究竟有什么区别?? msg只是单向的发送和接受. srv包含两个部分:请求和响应. 2.msg和srv简介 msg:msg文件是描述ROS消息字段的简单文本文件.它们用于为不同语言( ...
- 将ROS中的/sensor_msgs/NavSatFix数据导入google earth显示轨迹
将ros中的gps_msg数据导入google earth显示轨迹 [TOC] 1. 获取GPS数据 将ros中发布的gps topic输出到文本中 rostopic echo -p /gpsData ...
- ROS_Kinetic_27 在ROS中使用Cartographer进行SLAM
ROS_Kinetic_27 在ROS中使用Cartographer进行SLAM Cartographer是谷歌新開源的通用的2D和3D定位與構圖同步的SLAM工具,並提供ROS接口. 论文Real- ...
- ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0
ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0 ROS kinetic中的gazebo版本是7.0,有很多新的特性. 首先,启动gazebo: ~$ gaz ...
- ROS中的CMakeLists.txt
在ROS的编程过程中,如果CMakeLists.txt如果写不好,编译就很难成功.如果看不懂CMakeLists.txt那么很多错误你也不知道时什么回事.所以深入了解它是很有必要的.现在我们就来看看它 ...
- 对比几种在ROS中常用的几种SLAM算法
在此因为要总结写一个文档,所以查阅资料,将总结的内容记录下来,欢迎大家指正! 文章将介绍使用的基于机器人操作系统(ROS)框架工作的SLAM算法. 在ROS中提供的五种基于2D激光的SLAM算法分别是 ...
- 如何在ROS中使用PCL(2)
记录关于我们运行roslaunch openni_launch openni.launch 命令时生成的话题以及这些话题的数据类型便于后期的处理,只有知道它们的数据结构,才能很好的对数据进行处理,我 ...
随机推荐
- $cometoj\#4\ D\ $求和 不是$dp$
\(Des\) \(Sol\) \(upd:\)以下两段是错误做法,但我不想删掉\(.jpg\) -----------------------以下是错误部分--------------------- ...
- Google 开源的 Python 命令行库:深入 fire(二)
作者:HelloGitHub-Prodesire HelloGitHub 的<讲解开源项目>系列,项目地址:https://github.com/HelloGitHub-Team/Arti ...
- 解决springmvc报错,java.lang.IllegalArgumentException:No converter found for return value of type: class .......
1.背景 最近在自学java中的三大框架 ssm,在 springmvc 与 mybatis 整合过程中用到 json 数据交互.因为看的视频的是比较早的嘛,一些配置.jar包什么的,要么跟 jdk ...
- css label两端对齐
上面这种效果很常见,实现的代码如下: html部分 <ul> <li class="detail_item"> <span class="d ...
- 【转】利用Eclipse编辑中文资源文件(application_zh_CN.properties )
既然生为中国人,就没有什么好抱怨的了,遇到编码的问题,那只有解决它了. 如果经常使用Struts,并做过国际化操作的人来说,对于中文资源文件的处理应该不会感到陌生的.比如下面两个文件,一个是英文的,一 ...
- 你知道Java中的CopyOnWriteArrayList吗?
CopyOnWrite CopyOnWrite是什么? CopyOnWriteArrayList源码分享? CopyOnWriteArrayList使用场景? CopyOnWriteArrayList ...
- 贪心 park
来总结一道非常经典的好题 这一道题是通过贪心实现的 首先看到这一题的时间复杂度 n<=100000 需要一个比较玄学的做法 我们先假设把题干改成这个样子 一圈n个车位 停在每个车位都有一定的代价 ...
- [工具] 利用setuptools打包python程序
一.准备工程文件 1.创建工程leeoo 2.在工程根目录下创建setup.py文件 3.在工程根目录下创建同名package 二.编辑setup.py 1.编辑setup.py文件 from set ...
- python 枚举类型
在python中枚举是一种类(Enum,IntEnum),存放在enum模块中.枚举类型可以给一组标签赋予一组特定的值. 枚举的特点: 枚举类中不能存在相同的标签名 枚举是可迭代的 不同的枚举标签可以 ...
- SliverAppBar 介绍及使用
SliverAppBar控件可以实现页面头部区域展开.折叠的效果,类似于Android中的CollapsingToolbarLayout.先看下SliverAppBar实现的效果,效果图如下: Sli ...