ros中坐标系管理系统
首先安装小海龟实例的功能包ros-melodic-turtle-tf
qqtsj ~ sudo apt install ros-melodic-turtle-tf
[sudo] qqtsj 的密码:
正在读取软件包列表... 完成
正在分析软件包的依赖关系树
正在读取状态信息... 完成
ros-melodic-turtle-tf 已经是最新版 (0.2.2-0bionic.20191008.205941)。
ros-melodic-turtle-tf 已设置为手动安装。
升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软件包,有 111 个软件包未被升级。
我的ros系统已经安装好了
然后在启动launch文件,这个launch文件相当于一个脚本,可以一次性启动很多节点
qqtsj ~ roslaunch turtle_tf turtle_tf_demo.launch
... logging to /home/qqtsj/.ros/log/42e2c96a-42a0-11ea-b4ee-9822efa1466f/roslaunch-qqtsj-Nitro-AN515-51-8424.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB. started roslaunch server http://qqtsj-Nitro-AN515-51:34609/ SUMMARY
======== PARAMETERS
* /rosdistro: melodic
* /rosversion: 1.14.3
* /scale_angular: 2.0
* /scale_linear: 2.0
* /turtle1_tf_broadcaster/turtle: turtle1
* /turtle2_tf_broadcaster/turtle: turtle2 NODES
/
sim (turtlesim/turtlesim_node)
teleop (turtlesim/turtle_teleop_key)
turtle1_tf_broadcaster (turtle_tf/turtle_tf_broadcaster.py)
turtle2_tf_broadcaster (turtle_tf/turtle_tf_broadcaster.py)
turtle_pointer (turtle_tf/turtle_tf_listener.py) auto-starting new master
process[master]: started with pid [8435]
ROS_MASTER_URI=http://localhost:11311 setting /run_id to 42e2c96a-42a0-11ea-b4ee-9822efa1466f
process[rosout-1]: started with pid [8446]
started core service [/rosout]
process[sim-2]: started with pid [8449]
process[teleop-3]: started with pid [8450]
process[turtle1_tf_broadcaster-4]: started with pid [8451]
process[turtle2_tf_broadcaster-5]: started with pid [8452]
process[turtle_pointer-6]: started with pid [8453]
Reading from keyboard
---------------------------
Use arrow keys to move the turtle.
INFO: cannot create a symlink to latest log directory: [Errno 2] No such file or directory: '/home/qqtsj/.ros/log/latest'
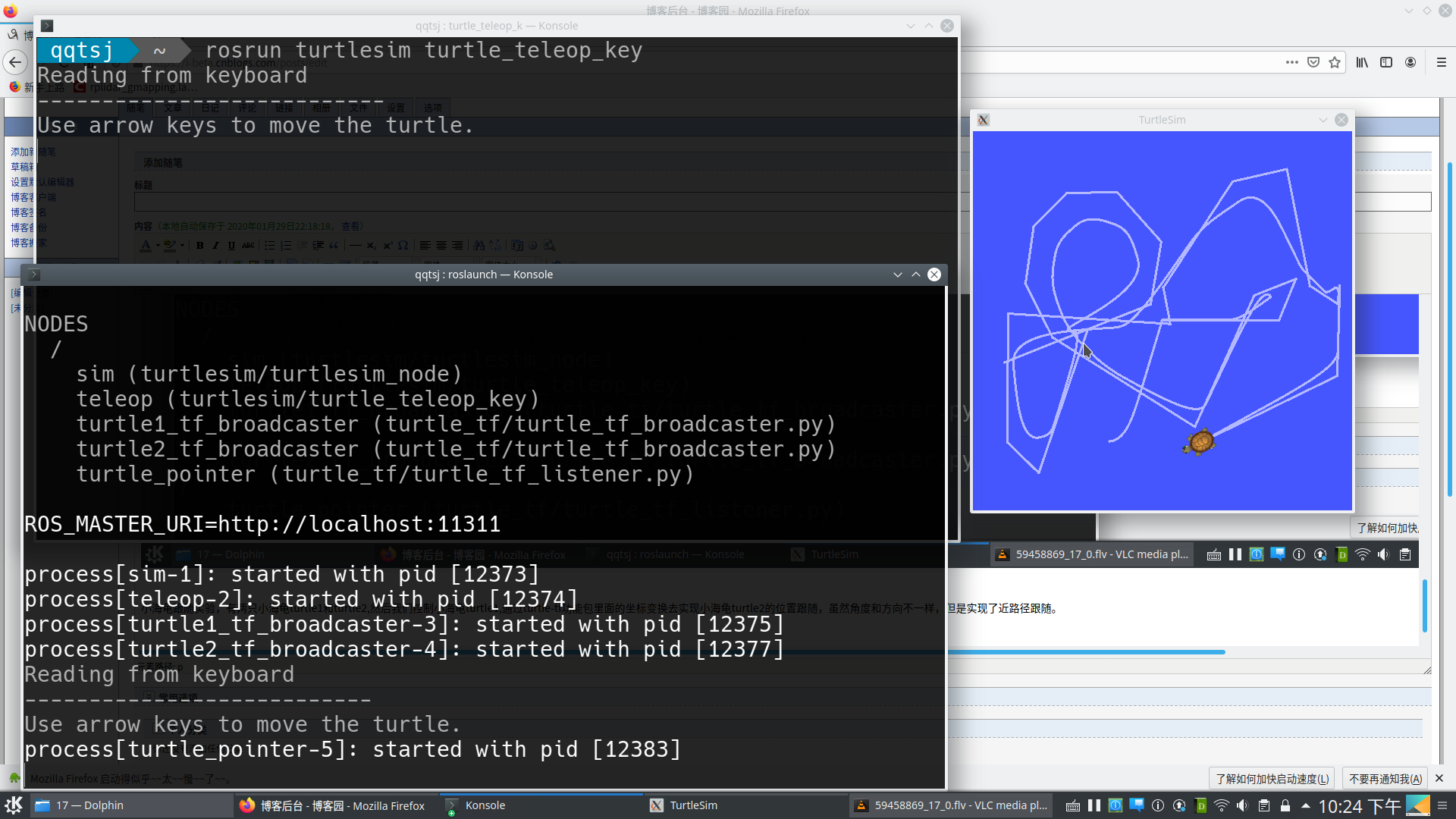
小海龟跟随实验,有两只小海龟turtle1和turtle2,然后我们控制小海龟turtle1,通过turtle-tf功能包里面的坐标变换去实现小海龟turtle2的位置跟随,虽然角度和方向不一样,但是实现了坐标的跟随。
接下来介绍一下跟随的原理,以及一个小工具。
运行$ rosrun tf view_frames 他会先监听5秒钟的时间,然后会生成一个frames.pdf文件
view_frames是tf功能包里面的一个小工具,可以直接可视化看到整个系统中tf之间的关系。
qqtsj ~ rosrun tf view_frames
Listening to /tf for 5.0 seconds
Done Listening
dot - graphviz version 2.40.1 (20161225.0304) Detected dot version 2.40
frames.pdf generated
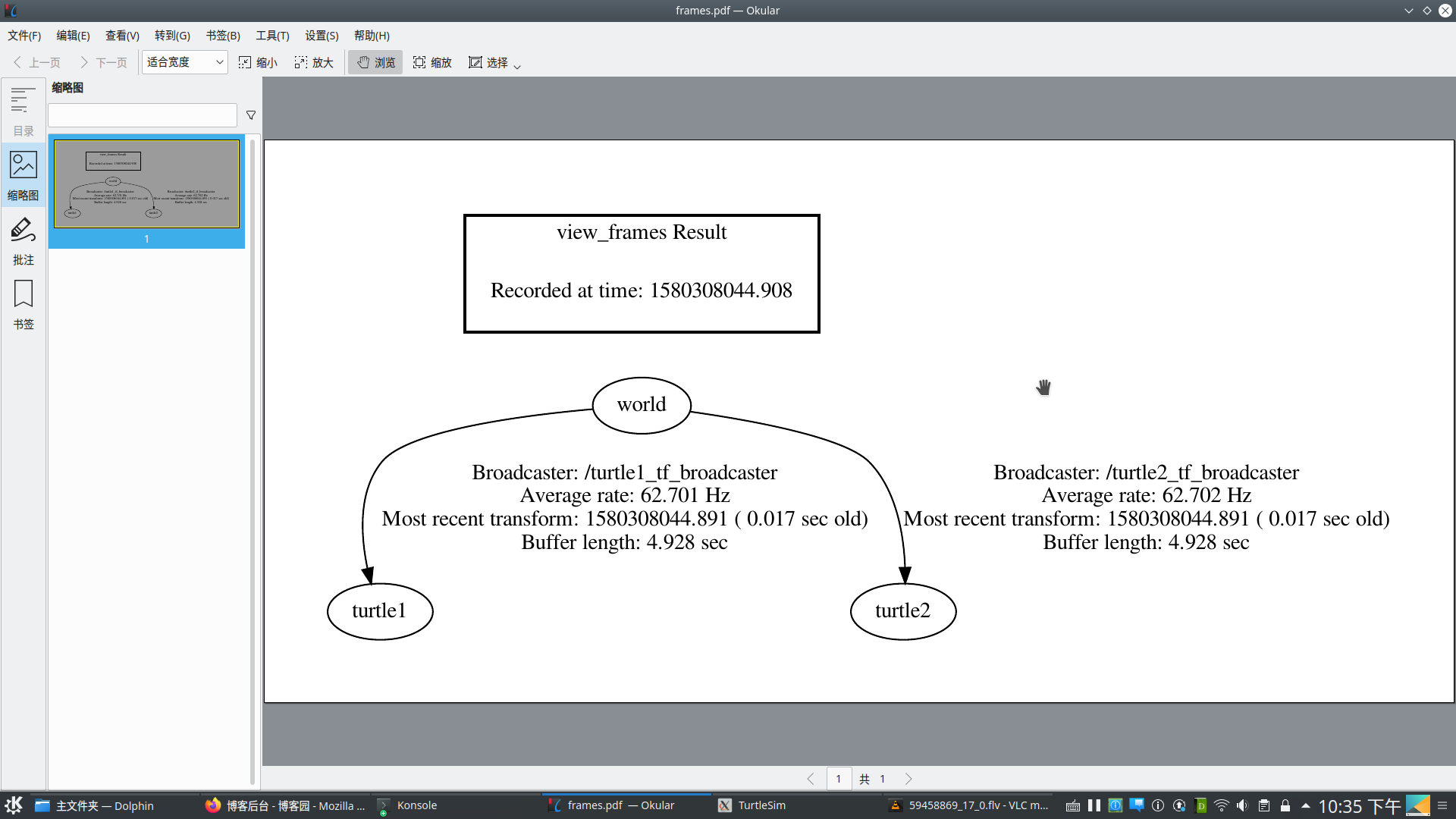
这是当前系统中tf之间的关系, 在当前的两只小海龟的仿真器中有三个坐标系 ,其中word坐标系是全局坐标系,两个小海龟是两个坐标系。
turtle1和turtle2两个坐标系不断的重合到一起,他们相对与word坐标系是不断变化的。
另外还有一个工具更加清楚的观察坐标系之间的关系 tf_echo (可以直接查询坐标系之间的关系)
qqtsj ~ rosrun tf tf_echo turtle1 turtle2
At time 1580309473.964
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
At time 1580309474.700
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
At time 1580309475.691
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
At time 1580309476.699
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
At time 1580309477.692
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
At time 1580309478.700
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
At time 1580309479.691
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
At time 1580309480.699
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
At time 1580309481.691
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
At time 1580309482.700
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.999, -0.035]
in RPY (radian) [0.000, -0.000, -3.072]
in RPY (degree) [0.000, -0.000, -176.021]
通过控制小海龟,会观察到数据在不断地变化。
ros中坐标系管理系统的更多相关文章
- ROS中利用V-rep进行地图构建仿真
V-rep中显示激光扫描点 在VREP自带的场景中找到practicalPathPlanningDemo.ttt文件,删除场景中多余的物体只保留静态的地图.然后在Model browser→comp ...
- ROS中发布激光扫描消息
激光雷达工作时会先在当前位置发出激光并接收反射光束,解析得到距离信息,而后激光发射器会转过一个角度分辨率对应的角度再次重复这个过程.限于物理及机械方面的限制,激光雷达通常会有一部分“盲区”.使用激光雷 ...
- ROS中msg和srv文件的区别
1.msg和srv究竟有什么区别?? msg只是单向的发送和接受. srv包含两个部分:请求和响应. 2.msg和srv简介 msg:msg文件是描述ROS消息字段的简单文本文件.它们用于为不同语言( ...
- 将ROS中的/sensor_msgs/NavSatFix数据导入google earth显示轨迹
将ros中的gps_msg数据导入google earth显示轨迹 [TOC] 1. 获取GPS数据 将ros中发布的gps topic输出到文本中 rostopic echo -p /gpsData ...
- ROS_Kinetic_27 在ROS中使用Cartographer进行SLAM
ROS_Kinetic_27 在ROS中使用Cartographer进行SLAM Cartographer是谷歌新開源的通用的2D和3D定位與構圖同步的SLAM工具,並提供ROS接口. 论文Real- ...
- ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0
ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0 ROS kinetic中的gazebo版本是7.0,有很多新的特性. 首先,启动gazebo: ~$ gaz ...
- ROS中的CMakeLists.txt
在ROS的编程过程中,如果CMakeLists.txt如果写不好,编译就很难成功.如果看不懂CMakeLists.txt那么很多错误你也不知道时什么回事.所以深入了解它是很有必要的.现在我们就来看看它 ...
- 对比几种在ROS中常用的几种SLAM算法
在此因为要总结写一个文档,所以查阅资料,将总结的内容记录下来,欢迎大家指正! 文章将介绍使用的基于机器人操作系统(ROS)框架工作的SLAM算法. 在ROS中提供的五种基于2D激光的SLAM算法分别是 ...
- 如何在ROS中使用PCL(2)
记录关于我们运行roslaunch openni_launch openni.launch 命令时生成的话题以及这些话题的数据类型便于后期的处理,只有知道它们的数据结构,才能很好的对数据进行处理,我 ...
随机推荐
- cocos2dx Vec2
//SE是坐标重叠部分 // returns true if segment A-B intersects with segment C-D. S->E is the overlap part ...
- 【题解】AcWing 110. 防晒(普及题)
[题解]AcWing 110. 防晒(普及题) AcWing 110. 防晒 你没有用过的全新OJ 嘿嘿水水题. 题目就是一维坐标轴上给定多个线段,给定多个点,点在线段上造成贡献,点可以重复,问最大贡 ...
- 洛谷$P$2235 $Kathy$函数 $[HNOI2002]$ 数位$dp$
正解:数位$dp$ 解题报告: 传送门$qwq$ $HNOI$的题从02年就这么神了嘛$QAQ$,,, 嗷对了这题如果看出了一个结论就是个数位$dp$板子,,,?但是结论很神我$jio$得挺难看出来的 ...
- 「SP25784」BUBBLESORT - Bubble Sort 解题报告
SP25784 BUBBLESORT - Bubble Sort 题目描述 One of the simplest sorting algorithms, the Bubble Sort, can b ...
- 「洛谷P3931」 SAC E#1 - 一道难题 Tree
P3931 SAC E#1 - 一道难题 Tree 题目背景 冴月麟和魏潇承是好朋友. 题目描述 冴月麟为了守护幻想乡,而制造了幻想乡的倒影,将真实的幻想乡封印了.任何人都无法进入真实的幻想乡了,但是 ...
- Spring Security 实战干货: 简单的认识 OAuth2.0 协议
1.前言 欢迎阅读 Spring Security 实战干货 系列文章 .OAuth2.0 是近几年比较流行的授权机制,对于普通用户来说可能每天你都在用它,我们经常使用的第三方登录大都基于 OAuth ...
- 基于GMC/umat的复合材料宏细观渐近损伤分析(二)
采用GMC/umat进行缠绕复合材料力学性能分析,将一些细节分享如下: 1.纤维缠绕复合材料内部交叉及波动分布受缠绕角度.缠绕线形的影响而不同,任意一种纤维缠绕结构其都存在层合区域.螺旋波动区域和环向 ...
- file_get_contents函数获取不到数据的一种情况
问题: file_get_contents($url) 获取不到数据,尽管URL地址正确,函数使用正确.如下代码 $url = "https://www.baidu.com"; ...
- VS2019菜单栏没有团队选项解决方法
新安装了Visual Studio 2019结果菜单栏没有“团队”菜单,导致没办法连接TFS服务器,查了下网上也并没有对应解决方法(甚至遇见这个问题的都没有/笑哭,所以这个方法写出来也大概没什么用) ...
- python爬虫——requests库使用代理
在看这篇文章之前,需要大家掌握的知识技能: python基础 html基础 http状态码 让我们看看这篇文章中有哪些知识点: get方法 post方法 header参数,模拟用户 data参数,提交 ...