OpenCV图像处理中“找圆技术”的使用
一、为什么“找圆”

代码:
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
#include <math.h>
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
Mat img, gray;
if( argc != 2 || !(img=imread(argv[1], 1)).data)
return -1;
cvtColor(img, gray, COLOR_BGR2GRAY);
// smooth it, otherwise a lot of false circles may be detected
GaussianBlur( gray, gray, Size(9, 9), 2, 2 );
vector<Vec3f> circles;
HoughCircles(gray, circles, HOUGH_GRADIENT,2, gray.rows/4, 200, 100 );
for( size_t i = 0; i < circles.size(); i++ )
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
// draw the circle center
circle( img, center, 3, Scalar(0,255,0), -1, 8, 0 );
// draw the circle outline
circle( img, center, radius, Scalar(0,0,255), 3, 8, 0 );
}
namedWindow( "circles", 1 );
imshow( "circles", img );
waitKey(0);
return 0;
}
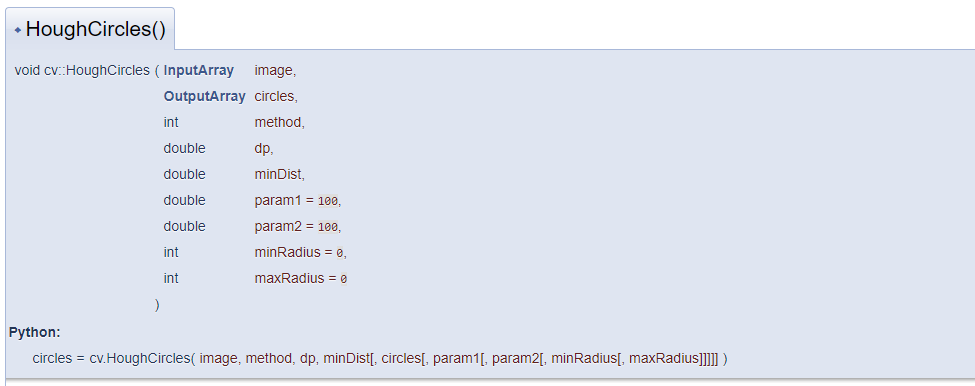
- 特别需要注意的是,目前版本出现新参数“HOUGH_GRADIENT_ALT”,在默认参数下比以前有很大程度的精度提升:
代码:
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
#include <math.h>
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
Mat img, gray;
if( argc != 2 || !(img=imread(argv[1], 1)).data)
return -1;
cvtColor(img, gray, COLOR_BGR2GRAY);
// smooth it, otherwise a lot of false circles may be detected
GaussianBlur( gray, gray, Size(9, 9), 2, 2 );
vector<Vec3f> circles;
HoughCircles(gray, circles, HOUGH_GRADIENT,2, gray.rows/4, 200, 100 );
for( size_t i = 0; i < circles.size(); i++ )
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
int radius = cvRound(circles[i][2]);
// draw the circle center
circle( img, center, 3, Scalar(0,255,0), -1, 8, 0 );
// draw the circle outline
circle( img, center, radius, Scalar(0,0,255), 3, 8, 0 );
}
namedWindow( "circles", 1 );
imshow( "circles", img );
waitKey(0);
return 0;
}- 特别需要注意的是,目前版本出现新参数“HOUGH_GRADIENT_ALT”,在默认参数下比以前有很大程度的精度提升:
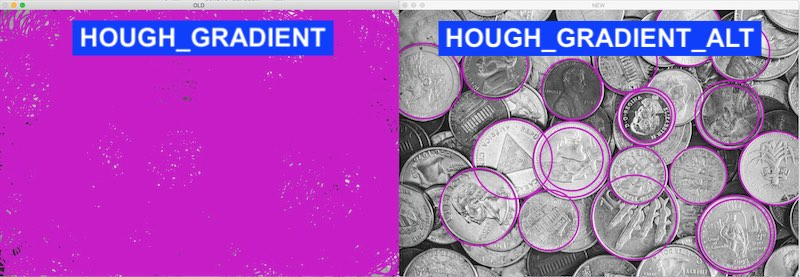
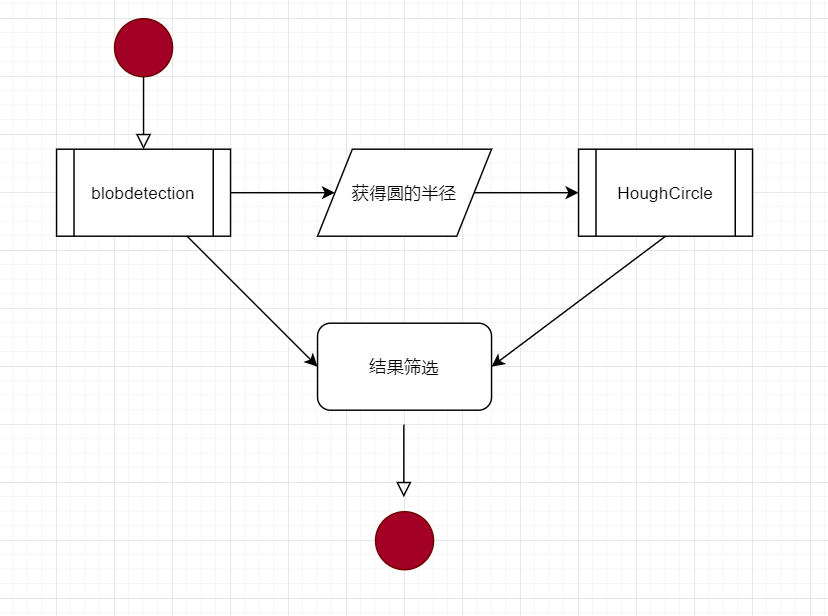
但是HoughCircle的缺点也是显而易见的,简单来说,在默认参数下,它非常容易丢目标。
2.2BlobDetector
所谓Blob就是图像中一组具有某些共同属性(例如,灰度值)的连接像素。OpenCV提供了一种方便的方法来检测斑点并根据不同的特征对其进行过滤。
// Setup SimpleBlobDetector parameters.
SimpleBlobDetector::Params params;
// Change thresholds
params.minThreshold = 10;
params.maxThreshold = 200;
// Filter by Area.
params.filterByArea = true;
params.minArea = 1500;
// Filter by Circularity
params.filterByCircularity = true;
params.minCircularity = 0.1;
// Filter by Convexity
params.filterByConvexity = true;
params.minConvexity = 0.87;
// Filter by Inertia
params.filterByInertia = true;
params.minInertiaRatio = 0.01;
#if CV_MAJOR_VERSION < 3 // If you are using OpenCV 2
// Set up detector with params
SimpleBlobDetector detector(params);
// You can use the detector this way
// detector.detect( im, keypoints);
#else
// Set up detector with params
cv::Ptr<cv::SimpleBlobDetector> detector = cv::SimpleBlobDetector::create(params);
vector<KeyPoint> keypoints;
detector->detect(screw1, keypoints);
#endif
在OpenCV中实现的叫做SimpleBlobDetector,它基于以下描述的相当简单的算法,并且进一步由参数控制,具有以下步骤。
SimpleBlobDetector::Params::Params()
{
thresholdStep = 10; //二值化的阈值步长,即公式1的t
minThreshold = 50; //二值化的起始阈值,即公式1的T1
maxThreshold = 220; //二值化的终止阈值,即公式1的T2
//重复的最小次数,只有属于灰度图像斑点的那些二值图像斑点数量大于该值时,该灰度图像斑点才被认为是特征点
minRepeatability = 2;
//最小的斑点距离,不同二值图像的斑点间距离小于该值时,被认为是同一个位置的斑点,否则是不同位置上的斑点
minDistBetweenBlobs = 10;
filterByColor = true; //斑点颜色的限制变量
blobColor = 0; //表示只提取黑色斑点;如果该变量为255,表示只提取白色斑点
filterByArea = true; //斑点面积的限制变量
minArea = 25; //斑点的最小面积
maxArea = 5000; //斑点的最大面积
filterByCircularity = false; //斑点圆度的限制变量,默认是不限制
minCircularity = 0.8f; //斑点的最小圆度
//斑点的最大圆度,所能表示的float类型的最大值
maxCircularity = std::numeric_limits<float>::max();
filterByInertia = true; //斑点惯性率的限制变量
minInertiaRatio = 0.1f; //斑点的最小惯性率
maxInertiaRatio = std::numeric_limits<float>::max(); //斑点的最大惯性率
filterByConvexity = true; //斑点凸度的限制变量
minConvexity = 0.95f; //斑点的最小凸度
maxConvexity = std::numeric_limits<float>::max(); //斑点的最大凸度
}
{
thresholdStep = 10; //二值化的阈值步长,即公式1的t
minThreshold = 50; //二值化的起始阈值,即公式1的T1
maxThreshold = 220; //二值化的终止阈值,即公式1的T2
//重复的最小次数,只有属于灰度图像斑点的那些二值图像斑点数量大于该值时,该灰度图像斑点才被认为是特征点
minRepeatability = 2;
//最小的斑点距离,不同二值图像的斑点间距离小于该值时,被认为是同一个位置的斑点,否则是不同位置上的斑点
minDistBetweenBlobs = 10;
filterByColor = true; //斑点颜色的限制变量
blobColor = 0; //表示只提取黑色斑点;如果该变量为255,表示只提取白色斑点
filterByArea = true; //斑点面积的限制变量
minArea = 25; //斑点的最小面积
maxArea = 5000; //斑点的最大面积
filterByCircularity = false; //斑点圆度的限制变量,默认是不限制
minCircularity = 0.8f; //斑点的最小圆度
//斑点的最大圆度,所能表示的float类型的最大值
maxCircularity = std::numeric_limits<float>::max();
filterByInertia = true; //斑点惯性率的限制变量
minInertiaRatio = 0.1f; //斑点的最小惯性率
maxInertiaRatio = std::numeric_limits<float>::max(); //斑点的最大惯性率
filterByConvexity = true; //斑点凸度的限制变量
minConvexity = 0.95f; //斑点的最小凸度
maxConvexity = std::numeric_limits<float>::max(); //斑点的最大凸度
}
- 阈值:通过使用以minThreshold开始的阈值对源图像进行阈值处理,将源图像转换为多个二进制图像。这些阈值以thresholdStep递增,直到maxThreshold。因此,第一个阈值为minThreshold,第二个阈值为minThreshold + thresholdStep,第三个阈值为minThreshold + 2 x thresholdStep,依此类推;
- 分组:在每个二进制图像中,连接的白色像素被分组在一起。我们称这些二进制blob;
- 合并:计算二进制图像中二进制斑点的中心,并合并比minDistBetweenBlob更近的斑点;
- 中心和半径计算:计算并返回新合并的Blob的中心和半径。
并且可以进一步设置SimpleBlobDetector的参数来过滤所需的Blob类型。
- 按颜色:首先需要设置filterByColor =True。设置blobColor = 0可选择较暗的blob,blobColor = 255可以选择较浅的blob。
- 按大小:可以通过设置参数filterByArea = 1以及minArea和maxArea的适当值来基于大小过滤blob。例如。设置minArea = 100将滤除所有少于100个像素的斑点。
- 按圆度:这只是测量斑点距圆的距离。例如。正六边形的圆度比正方形高。要按圆度过滤,请设置filterByCircularity =1。然后为minCircularity和maxCircularity设置适当的值。圆度定义为(
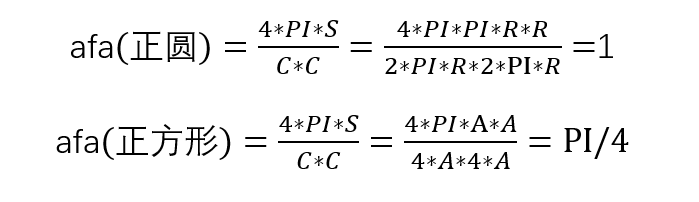
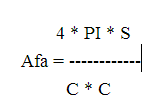 )。圆的为圆度为1,正方形的圆度为PI/4,依此类推。
)。圆的为圆度为1,正方形的圆度为PI/4,依此类推。
- 按凸性:凸度定义为(斑点的面积/凸包的面积)。现在,形状的“凸包”是最紧密的凸形,它完全包围了该形状,用不严谨的话来讲,给定二维平面上的点集,凸包就是将最外层的点连接起来构成的凸多边形,它能包含点集中所有的点。直观感受上,凸性越高则里面“奇怪的部分”越少。要按凸度过滤,需设置filterByConvexity = true,minConvexity、maxConvexity应该属于[0,1],而且maxConvexity> minConvexity。
- 按惯性比:这个词汇比较抽象。我们需要知道Ratio可以衡量形状的伸长程度。简单来说。对于圆,此值是1,对于椭圆,它在0到1之间,对于直线,它是0。按惯性比过滤,设置filterByInertia = true,并设置minInertiaRatio、maxInertiaRatio同样属于[0,1]并且maxConvexity> minConvexity。
按凸性(左低右高)
按惯性比(左低右高)

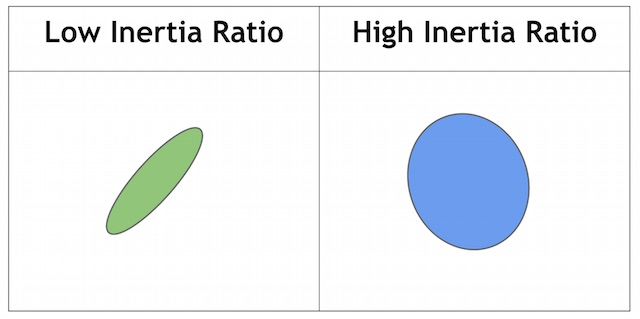
)。圆的为圆度为1,正方形的圆度为PI/4,依此类推。| 按凸性(左低右高) | 按惯性比(左低右高) |
| |
|
cv::Ptr<cv::SimpleBlobDetector> detector = cv::SimpleBlobDetector::create();

OpenCV图像处理中“找圆技术”的使用的更多相关文章
- OpenCV图像处理中的“机器学习"技术的使用
注意,本文中所指"机器学习"(ML)技术,特指SVM.随机森林等"传统"技术. 一.应用场景 相比较当下发展迅速的各路"端到端" ...
- OpenCV图像处理中常用函数汇总(2)
// 霍夫线变换 hough vector<Vec2f> lines;//定义一个矢量结构lines用于存放得到的线段矢量集合 HoughLines(dstImage,lines,,CV_ ...
- OpenCV图像处理中常用函数汇总(1)
//俗话说:好记性不如烂笔头 //用到opencv 中的函数时往往会一时记不起这个函数的具体参数怎么设置,故在此将常用函数做一汇总: Mat srcImage = imread("C:/Us ...
- opencv——pcb上找圆mark点(模板匹配)
#include "stdafx.h" #include <cv.h> #include <highgui.h> #include <cxcore.h ...
- Android技术——在Android中的随意视图中找控件
1.在非常多情况下,我们可能不知道控件的id,可是我们却希望在包括这个控件的视图中找到它,能够採用例如以下做法: 例:在Activity的根视图中找出当中全部的Button控件 private voi ...
- Zedboard甲诊opencv图像处理(三)
整个工程进展到这一步也算是不容易吧,但技术含量也不怎么高,中间乱起八糟的错误太烦人了,不管怎么样,现在面临了最大的困难吧,图像处理算法.算法确实不好弄啊,虽然以前整过,但都不是针对图像的. 现在的图像 ...
- Python+OpenCV图像处理(十四)—— 直线检测
简介: 1.霍夫变换(Hough Transform) 霍夫变换是图像处理中从图像中识别几何形状的基本方法之一,应用很广泛,也有很多改进算法.主要用来从图像中分离出具有某种相同特征的几何形状(如,直线 ...
- 【python+opencv】直线检测+圆检测
Python+OpenCV图像处理—— 直线检测 直线检测理论知识: 1.霍夫变换(Hough Transform) 霍夫变换是图像处理中从图像中识别几何形状的基本方法之一,应用很广泛,也有很多改进 ...
- (转载)找圆算法((HoughCircles)总结与优化
Opencv内部提供了一个基于Hough变换理论的找圆算法,HoughCircle与一般的拟合圆算法比起来,各有优势:优势:HoughCircle对噪声点不怎么敏感,并且可以在同一个图中找出多个圆 ...
随机推荐
- SwiftUI & Compose View
SwiftUI & Compose View OK // // ContentView.swift // Landmarks // // Created by 夏凌晨 on 2020/10/2 ...
- gradient text & gradient background
gradient text & gradient background -webkit-text-fill-color & -webkit-gradient https://wesbo ...
- taro 三端开发
taro 三端开发 wx 小程序, alipay 小程序,H5 https://taro-docs.jd.com/taro/docs/GETTING-STARTED.html#h5 https://t ...
- ES2020 All in One
ES2020 All in One ES2020 new features / ES11 ES2020 中的10个新功能 1. BigInt BigInt是JavaScript中最令人期待的功能之一, ...
- 华盛顿邮报专访:SPC能否再掀起币圈新浪潮?
近日,美国知名媒体华盛顿邮报对话NGK灵石团队技术副总裁Daphne Patel女士,对话主题为"SPC能否再掀起币圈新浪潮".此次对话以问答的形式展开,将SPC的最新情况呈现在你 ...
- 阿里面试这样问:redis 为什么把简单的字符串设计成 SDS?
2021开工第一天,就有小伙伴私信我,还给我分享了一道他面阿里的redis题(这家伙绝比已经拿到年终奖了),我看了以后觉得挺有意思,题目很简单,是那种典型的似懂非懂,常常容易被大家忽略的问题.这里整理 ...
- ASP.NET Core中如何对不同类型的用户进行区别限流
老板提出了一个新需求,从某某天起,免费用户每天只能查询100次,收费用户100W次. 这是一个限流问题,聪明的你也一定想到了如何去做:记录用户每一天的查询次数,然后根据当前用户的类型使用不同的数字做比 ...
- Go的函数
目录 Go的函数 一.函数的定义 1.函数的基本格式 2.函数的参数 2.1 函数传参的特点:copy传值 3.函数的返回值 4.可变长参数 二.函数的类型 1.给函数的类型重命名 三.匿名函数 1. ...
- 一文了解python的 @property
参考自: https://www.programiz.com/python-programming/property Python为我们提供了一个内置装饰器@property,此方法使得getter和 ...
- 大话Spark(5)-三图详述Spark Standalone/Client/Cluster运行模式
之前在 大话Spark(2)里讲过Spark Yarn-Client的运行模式,有同学反馈与Cluster模式没有对比, 这里我重新整理了三张图分别看下Standalone,Yarn-Client 和 ...