ORB-SLAM2初步
一、ORB-SLAM简介
最近开始入坑SLAM,经过简单调研,各位大咖认为,目前最优秀的视觉SLAM系统是ORB-SLAM2,因此对ORB-SLAM2进行了学习。
ORB-SLAM2是2015年提出的支持单目、双目、RGB-D相机三种工作模式的SLAM系统。整个系统基于ORB特征实现,包含了跟踪定位、局部地图构建、回环检测三个主线程。通常认为ORB-SLAM是基于PTAM的而进一步发展的,包含了目前流行SLAM系统的主要模块。整个系统在PC端运行帧率可达30帧,由于使用了自动初始化、重定位、回环检测等,具备较好的鲁棒性和准确性。官网网址为:http://webdiis.unizar.es/~raulmur/orbslam/。
二、ORB-SLAM三线程分析
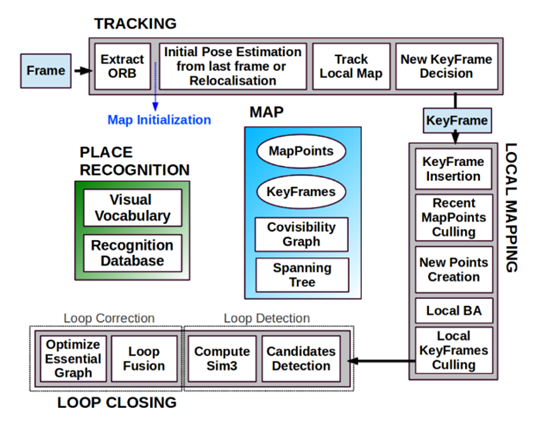
如上图所示,三线程为Tracking、LocalMapping、LoopClosing。
(1)跟踪模块:主要是通过提取每一帧的ORB特征,通过恒速模型、关键帧模型、重定位估计相机初始位姿,然后通过共视关系跟踪局部局部地图来优化相机位姿进行优化,最后确定当前帧是否作为关键帧插入地图中。
(2)局部建图:主要是针对跟踪过程中产生的关键帧进行操作,包括把该关键帧插入到地图中,添加新的地图点,剔除冗余的关键帧、地图点,通过Local BA优化相机位姿和地图点。
(3)回环检测:同样针对关键帧进行操作,主要是通过BoW模型判断当前关键帧是否产生回环,如果产生可能的回环则进行回环一致性检测,通过一致性检测之后认为运动已经产生回环,则计算Sim3变换进行回环矫正,并另起线程进行全局优化。
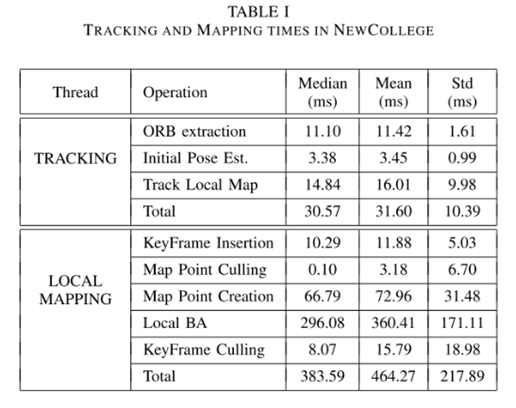
其中跟踪模块需要处理摄像头获取的每一帧图像,从而实时估计相机位姿,而局部建图和回环检测通常只针对关键帧进行操作,因此不需要实时运行。下面贴了作者测试的时间分布情况:
学习ORB-SLAM2过程中参考了很多大咖的博客(都是可以百度出来的):
http://blog.csdn.net/u010128736/article/details/53157605
http://www.cnblogs.com/gaoxiang12/p/5161223.html
。。。。
安装配置的过程网上的教程已经很多了,这里就不在赘述了。上面这些都是网上现成的,后面将给出自己学习过程中理解的具体细节。
ORB-SLAM2初步的更多相关文章
- orb slam2 双目摄像头
主要参考了http://blog.csdn.net/awww797877/article/details/51171099这篇文章,其中需要添加的是:export ROS_PACKAGE_PATH=$ ...
- ORB SLAM2在Ubuntu 16.04上的运行配置
http://www.mamicode.com/info-detail-1773781.html 安装依赖 安装OpenGL 1. 安装opengl Library$sudo apt-get inst ...
- 关于ORB SLAM2资源整理(持续更新)
ORB SLAM2源码讲解(吴博) https://www.youtube.com/watch?v=2GVE7FTW7AU 泡泡机器人视频整理: http://space.bilibili.com/3 ...
- ORB SLAM2 学习笔记
cd ~/Documents/demos/ORB_SLAM2 ./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.y ...
- Ubuntu14.04 使用本地摄像头跑ORB SLAM2(暂未完成)
嗯 这个方法我暂时弄不出来,用了另外一个方法:SLAM14讲 第一次课 使用摄像头或视频运行 ORB-SLAM2 前面的准备: Ubuntu14.04安装 ROS 安装步骤和问题总结 Ubuntu14 ...
- orb slam2
- 使用 evo 工具评测 VI ORB SLAM2 在 EuRoC 上的结果
http://www.liuxiao.org/2017/11/%E4%BD%BF%E7%94%A8-evo-%E5%B7%A5%E5%85%B7%E8%AF%84%E6%B5%8B-vi-orb-sl ...
- Ubuntu16.04+Ros+Usb_Cam ORB SLAM2
转载自:https://www.jianshu.com/p/dbf39b9e4617亲测可用 1.其中编译ORB_SLAM2的 ./build.sh 和 ./build_ros.sh之前需要修改文 ...
- 最近一年语义SLAM有哪些代表性工作?
点击"计算机视觉life"关注,置顶更快接收消息! 本文由作者刘骁授权发布,转载请联系原作者,个人主页http://www.liuxiao.org 目前 Semantic SLAM ...
- SLAM学习笔记 - ORB_SLAM2源码运行及分析
参考资料: DBow2的理解 单目跑TUM数据集的运行和函数调用过程 跑数据集不需要ros和相机标定,进入ORB_SLAM目录,执行以下命令: ./Examples/Monocluar/mono_tu ...
随机推荐
- springboot项目POM文件第一行报错 Unknown Error
改成 war 不错了,但是打包麻烦 pom 文件报错 UnKnown Error第一次碰到这个问题,花了几个小时才解决,除了UnKnown 没有任何提示.网上搜的大部分情况都不是我遇到的. 还是没有解 ...
- SqlHelper发布——比你期望的还要多的多(例如比MyBatis-Pagehelper性能更高)
SqlHelper发布——比Mybatis-PageHelper性能更高 起源 前段时间开启了一个新的项目,在选择分页插件时,发现github上很流行的一个是pagehelper,在百度上搜索了一下, ...
- 知识图谱与Bert结合
论文题目: ERNIE: Enhanced Language Representation with Informative Entities(THU/ACL2019) 本文的工作也是属于对BERT锦 ...
- 如何当上Leader和六千个bug的系统
在昨天的读书会上我分享了我是如何当上leader以及当上leader之后的体会.然后今天Sophie总结了我的发言,大家对此有些反馈.我根据大家的反馈写了这篇文章,主要针对几点: 大家如何当上lead ...
- kali渗透综合靶机(十六)--evilscience靶机
kali渗透综合靶机(十六)--evilscience靶机 一.主机发现 1.netdiscover -i eth0 -r 192.168.10.0/24 二.端口扫描 1. masscan --ra ...
- net core中引用GDAL
<Project Sdk="Microsoft.NET.Sdk"> <PropertyGroup> <OutputType>Exe</Ou ...
- web api 记录部署IIS获取服务器地址的类型
获取服务器地址类型分多种,以下记录 1.HttpContext.Current.Server.MapPath("~/File") 返回的值为 D:\3Project\Code\Mo ...
- 对象数组自定义排序--System.Collections.ArrayList.Sort()
使用System.Collections.ArrayList.Sort()对象数组自定义排序 其核心为比较器的实现,比较器为一个类,继承了IComparer接口并实现int IComparer.Com ...
- Activex在没有电子秤api的情况下获取串口数据
大二做B/S架构的项目使用了安衡电子秤CHS-D+R和一款扫码枪,两个设备的串口使用一样,这款电子秤是相当的坑,没有开发的api,无奈只能自己开发Activex了,在B/S架构中进行引用Activex ...
- 基于OpenCV.Net投影法进行文本分块切割
假设有如下一张图,如何把其中的文本分块切割出来,比如“华普超市朝阳门店”.“2015-07-26”就是两个文本块. 做图像切割有很多种方法,本文描述一种最直观的投影检测法.先来看看什么是投影,简单来说 ...