TIM-PWM输出,占空比改变时机对输出波形的影响
一、实验概述
以下说明描述三种改变PWM占空比的方式,对于当前PWM输出波形的影响
1、禁止预装载功能,在PWM某一周期波形输出过程中改变占空比值(ccp)
2、禁止预装载功能,在PWM某周期波形输出完成后改变占空比值(ccp)
3、使能预装载功能,在PWM某一周期波形输出过程中改变占空比值(ccp)
4、使能预装载功能,在PWM某周期波形输出完成后改变占空比值(ccp)
以沁恒CH32V307VCT6芯片测试为基准,测试开发板:CH32V307V-R1-1V0
测试代码:见文章末尾
二、预装载功能解析
- 代码解析
TIM_OC1PreloadConfig ( TIM1, TIM_OCPreload_Enable );
void TIM_OC1PreloadConfig(TIM_TypeDef *TIMx, uint16_t TIM_OCPreload)
{
uint16_t tmpccmr1 = 0;
tmpccmr1 = TIMx->CHCTLR1;
tmpccmr1 &= (uint16_t) ~((uint16_t)TIM_OC1PE);
tmpccmr1 |= TIM_OCPreload;
TIMx->CHCTLR1 = tmpccmr1;
}
#define TIM_OC1PE ((uint16_t)0x0008) /* Output Compare 1 Preload enable */
解析:从代码中可以看出底层代码是对“输出比较寄存器1(TIMx_CHCTLR1)”的
bit3位进行置位和初始化;
- 手册关于此位功能解析
“Bit3:OC1PE-输出比较寄存器1预装载使能位”详细描述如下:
输出比较寄存器1预装载使能位
1:开启输出比较寄存器1(TIMx_CH1CVR)的预装载功能,读写操作仅对预装载寄存器操作,输出比较寄存器1的预装载值在更新事件到来时被加载至当前影子寄存器中;
0:禁止输出比较寄存器1的预装载功能,可随时写入输出比较寄存器1,并且新写入的数值立即起作用
- 预装载功能详细解析
- 首先我们所用的“输出比较寄存器1(TIMx_CH1CVR)”实际上均是由两个寄存器组成的:Preload register(预装载寄存器)+ Shadow register(影子寄存器)
- 如果OC1PE=0,即不使能CH1CVR的预装载功能,则修改TIMx_CH1CVR寄存器的值就是操作影子寄存器,新的CH1CVR的值会立即生效。
- 如果OC1PE=1,即使能CH1CVR的预装载功能,则修改TIMx_CH1CVR 寄存器的值就是操作预装载寄存器,要等到发生更新事件后,TIMx_CH1CVR预装载寄存器的值才会拷贝到影子寄存器中,进而新的CH1CVR的值才会生效。
三、实验代码解析如下
设定系统时钟为SYSCLK_CLOCK=48MHz;
设定定时器1预分频系数PSC=48000-1,即定时器1ms记一个数;
设定定时器1自动重装载值ARR=100-1,即定时器计数到100更新一次,周期为100ms;
设定TIM1_CH1、TIM1_CH2、TIM1_CH3、TIM1_CH4均为输出比较模式,且配置相同。
设定定时器1输出比较寄存器1、2、3、4的值为CH1CVR=CH2CVR=CH3CVR= CH4CVR =CCP=30。
禁止输出比较寄存器1(TIM1_CH1)的预装载功能
使能输出比较寄存器2(TIM1_CH2)的预装载功能。
禁止输出比较寄存器3(TIM1_CH3)的预装载功能。
使能输出比较寄存器4(TIM1_CH4)的预装载功能。
开启定时器1更新中断,500ms后在中断中改变CH1CVR=CH2CVR=90
设定定时器2,每51ms进一次中断,在459ms后在中断中改变CH3CVR=CH4CVR=90
四个通道波形如下所示:
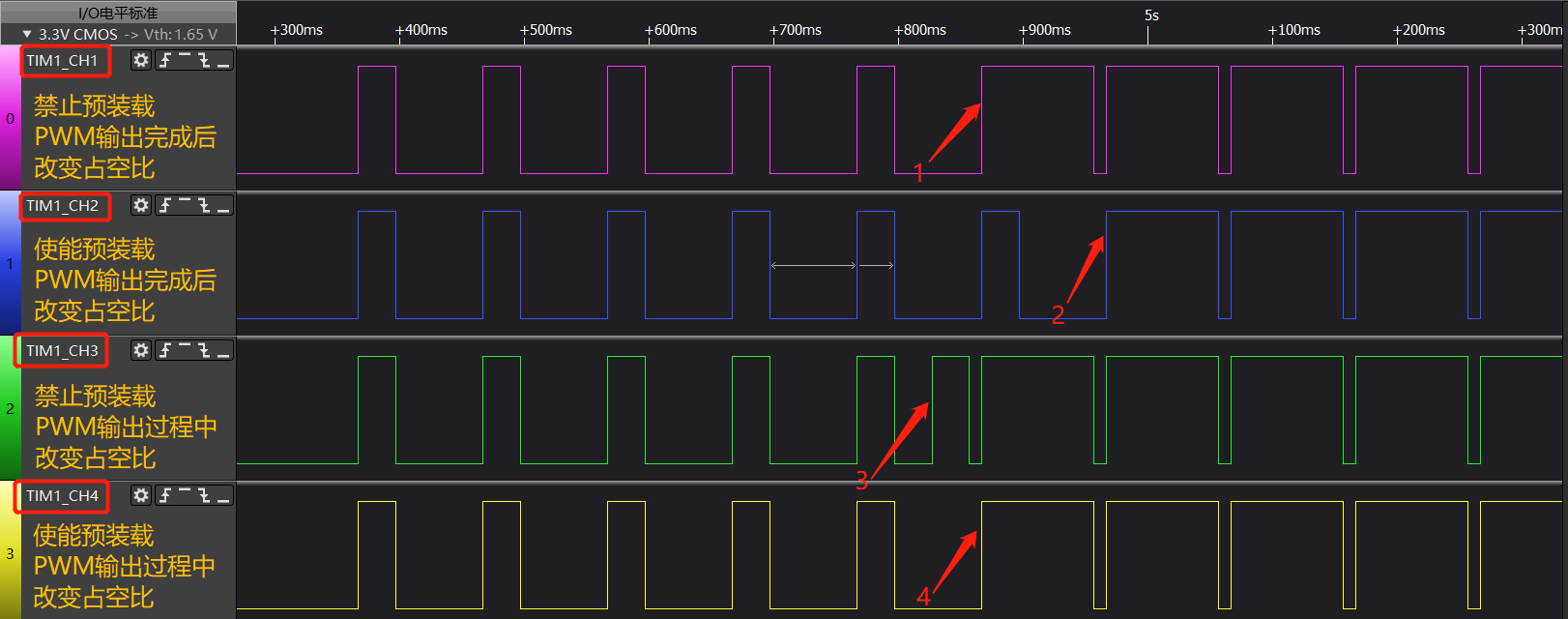
波形图解析:
- 对于TIM1_CH1,禁止输出比较寄存器1(TIM1_CH1)的预装载功能;
在波形图箭头1处TIM1->CH1CVR=90;的操作相当于将值直接存入影子寄存器(波形图箭头1处),新的CH2CVR的值会立刻生效。
- 对于TIM1_CH2,开启输出比较寄存器2(TIM1_CH2)的预装载功能
在波形图箭头1处TIM1->CH2CVR=90;的操作相当于将值存入预装载寄存器;
在等待发生更新事件(波形图箭头2处)后,会将值拷贝到影子寄存器;
进而新的CH1CVR的值才会生效。
- 对于TIM1_CH3,禁止输出比较寄存器3(TIM1_CH3)的预装载功能;
在波形图箭头3处TIM1->CH1CVR=90;的操作相当于将值直接存入影子寄存器(波形图箭头3处),新的CH3CVR的值会立刻生效。由于此时的计数值小于90,故而电平会发生翻转为高电平。
- 对于TIM1_CH4,开启输出比较寄存器4(TIM1_CH4)的预装载功能;
在波形图箭头3处TIM1->CH4CVR=90;的操作相当于将值存入预装载寄存器;
在等待发生更新事件(波形图箭头4处)后,会将值拷贝到影子寄存器;进而新的CH4CVR的值才会生效。
实验代码如下:
#include "debug.h"
void TIM1_UP_IRQHandler(void) __attribute__((interrupt("WCH-Interrupt-fast")));
void TIM2_IRQHandler(void) __attribute__((interrupt("WCH-Interrupt-fast")));
u16 i=0;
u16 j=0;
void TIM1_OutCompare_Init( u16 arr, u16 psc, u16 ccp )
{
GPIO_InitTypeDef GPIO_InitStructure={0};
TIM_OCInitTypeDef TIM_OCInitStructure={0};
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure={0};
NVIC_InitTypeDef NVIC_InitStructure = {0};
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_TIM1, ENABLE );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOA, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOA, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOA, &GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOA, &GPIO_InitStructure );
TIM_TimeBaseInitStructure.TIM_Period = arr;
TIM_TimeBaseInitStructure.TIM_Prescaler = psc;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit( TIM1, &TIM_TimeBaseInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = ccp;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init( TIM1, &TIM_OCInitStructure );
TIM_OC2Init( TIM1, &TIM_OCInitStructure );
TIM_OC3Init( TIM1, &TIM_OCInitStructure );
TIM_OC4Init( TIM1, &TIM_OCInitStructure );
NVIC_InitStructure.NVIC_IRQChannel = TIM1_UP_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_CtrlPWMOutputs(TIM1, ENABLE );
TIM_OC1PreloadConfig( TIM1, TIM_OCPreload_Disable );
TIM_OC2PreloadConfig( TIM1, TIM_OCPreload_Enable );
TIM_OC3PreloadConfig( TIM1, TIM_OCPreload_Disable );
TIM_OC4PreloadConfig( TIM1, TIM_OCPreload_Enable );
TIM_ARRPreloadConfig( TIM1, ENABLE );
TIM_ClearITPendingBit(TIM1,TIM_IT_Update);
TIM_ITConfig(TIM1,TIM_IT_Update,ENABLE);
TIM_Cmd( TIM1, ENABLE );
}
void TIM2_CNT_Init(u16 arr, u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure={0};
NVIC_InitTypeDef NVIC_InitStructure = {0};
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE );
TIM_TimeBaseInitStructure.TIM_Period = arr;
TIM_TimeBaseInitStructure.TIM_Prescaler = psc;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit( TIM2, &TIM_TimeBaseInitStructure);
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_ARRPreloadConfig( TIM2, ENABLE );
TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);
TIM_Cmd( TIM2, ENABLE );
}
void TIM1_UP_IRQHandler(void)
{
if(TIM_GetITStatus(TIM1,TIM_IT_Update) == SET)
{
i++;
if(i==5)
{
TIM1->CH1CVR=90;
TIM1->CH2CVR=90;
}
TIM_ClearFlag(TIM1,TIM_IT_Update);
}
}
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2,TIM_IT_Update) == SET)
{
j++;
if(j==9)
{
TIM1->CH3CVR=90;
TIM1->CH4CVR=90;
}
TIM_ClearFlag(TIM2,TIM_IT_Update);
}
}
int main(void)
{
TIM1_OutCompare_Init( 100-1, 48000-1, 30 );//1ms记一个数
TIM2_CNT_Init(51-1, 48000-1);//51ms
while(1);
}
TIM-PWM输出,占空比改变时机对输出波形的影响的更多相关文章
- STM32 HAL库学习系列第4篇 定时器TIM----- 开始定时器与PWM输出配置
基本流程: 1.配置定时器 2.开启定时器 3.动态改变pwm输出,改变值 HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_1); 函数总结: __HAL_TIM ...
- NUCLEO-L053R8 TIM定时器 PWM输出
TIM2 PWM输出测试 今天给大伙分享一个TIM2 PWM输出小实验. 实验开发板:Nucleo-L053R8,即STM32L053R8T6. 开发环境:MDK5 图1 - 工程界面 本次实验测试的 ...
- (五)转载:通用定时器PWM输出
1. TIMER输出PWM基本概念 脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有 ...
- STM32(7)——通用定时器PWM输出
1.TIMER输出PWM基本概念 脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种 ...
- 16路PWM输出的pca9685模块
今天要介绍的就是该模块,该模块是16路pwm模块,使用I2C总线可以控制16路舵机(led). 接线OE空着就可以,其他VCC是芯片供电+5,SCL时钟线,SDA信号线,GND地线. 芯片介绍可以看: ...
- 关于STM32CubeMX使用LL库设置PWM输出
HAL和LL库 HAL是ST为了实现代码在ST家族的MCU上的移植性,推出的一个库,称为硬件抽象层,很明显,这样做将会牺牲存储资源,所以项目最后的代码比较冗余,且运行效率大大降低,运行速度受制于fla ...
- TIMER门控模式控制PWM输出长度
TIMER门控模式控制PWM输出长度 参照一些网友代码做了些修改,由TIM4来控制TIM2的PWM输出长度, 采用主从的门控模式,即TIM4输出高时候TIM2使能输出 //TIM2 PWM输出,由TI ...
- STM32: TIMER门控模式控制PWM输出长度
搞了两天单脉冲没搞定,无意中发现,这个利用主从模式的门控方式来控制一路PWM的输出长度很有效. //TIM2 PWM输出,由TIM4来控制其输出与停止 //frequency_tim2:TIM2 PW ...
- STM32F103ZET6 PWM输出
1.通用定时器的PWM功能 STM32F103ZET6有4个通用定时器,分别是TIM2.TIM3.TIM4.TIM5. 通用定时器由一个可编程预分频器驱动的16位自动装载计数器构成. 通用定时器的很多 ...
- 合宙AIR105(三): 定时器, 定时器中断和PWM输出
目录 合宙AIR105(一): Keil MDK开发环境, DAP-Link 烧录和调试 合宙AIR105(二): 时钟设置和延迟函数 合宙AIR105(三): 定时器, 定时器中断和PWM输出 Ai ...
随机推荐
- c# iis网站发布
c# iis网站发布 问题一: 有很多人在用服务器发布网站的时候,一直出现 "HTTP 错误 403.14 - Forbidden Web 服务器被配置为不列出此目录的内容",那么 ...
- Zookeeper分布式服务
Zookeeper(CP) 以集群的方式[leader和follower]为分布式应用提供协调服务.负责存储和管理大家都关系的数据,接受观察者注册.消息分发等服务 特点: 只要有半数以上的节点存活就能 ...
- 什么是DI
属性的依赖注入,spring在通过IOC创建对象的时候,如果对象还有属性,就一并给赋值进去DI是在IOC的基础上进行对象的属性注入
- QT网络编程【一】
1.QUdpSocket头文件无法识别怎么解决? 问题原因:qmake没有添加network的模块.在工程配置文件中添加配置即可. 2.选择c++的socket库还是QUdpSocket? 3.同样的 ...
- JSP环境搭建及入门 和 虚拟路径和虚拟主机
Jsp:是一个动态网页,而不是静态网页 html,css,js,Jquery:是静态网页 动态网页是随着,时间,地点,用户操作,而改变 静态不需要jsp 动态是需要的 BS 可以通过浏览器直接访问浏览 ...
- Class 'dmstr\web\AdminLteAsset' not found
Yii2出现 Class 'dmstr\web\AdminLteAsset' not found 报错 1.检查下是不是vendor从其他地方复制过来的 2.检查根目录composer.json 中 ...
- For循环用法-打印乘法表
for循环可以遍历某一对象(遍历:通俗点说,就是把这个循环中的第一个元素到最后一个元素依次访问一次).for循环的结构如下 具体例子打印乘法表: #打印乘法表: for i in range(1, ...
- java获取前端的token并验证与拦截器
请求时获取token并验证 public class MyInterceptor implements HandlerInterceptor { //方法执行前进行拦截 @Override publi ...
- Kotlin 基础
Kotlinbase.kt @file:JvmName("kotlinbaseTest") import kotlin.math.roundToInt as atoInt fun ...
- 详解AQS的7个同步组件
摘要:AQS的全称为Abstract Queued Synchronizer,是在J.U.C(java.util.concurrent)下子包中的类. 本文分享自华为云社区<[高并发]AQS案例 ...