CAN总线学习记录之四:位定时与同步
一、位定时
1.1 比特率和波特率
1)位速率:又叫做比特率(bit rata)、信息传输率,表示的是单位时间内,总线上传输的信息量,即每秒能够传输的二进制位的数量,单位是bit per second。
2)波特率:又叫做传码率、信号传输率,表示的是单位时间内传输的码元的数量,当两相调制时,一个码元用一个二进制位表示,此时波特率在数值上和比特率是一样的,CAN总线正是两项调制这种情况。
Tips: 比特率和波特率并不是一回事儿,这一定一定要牢记。
1.2 位时间
1.2.1 位时间的概念
位时间:表示的是一个二进制位在总线上传输时所需要的时间。
所以:
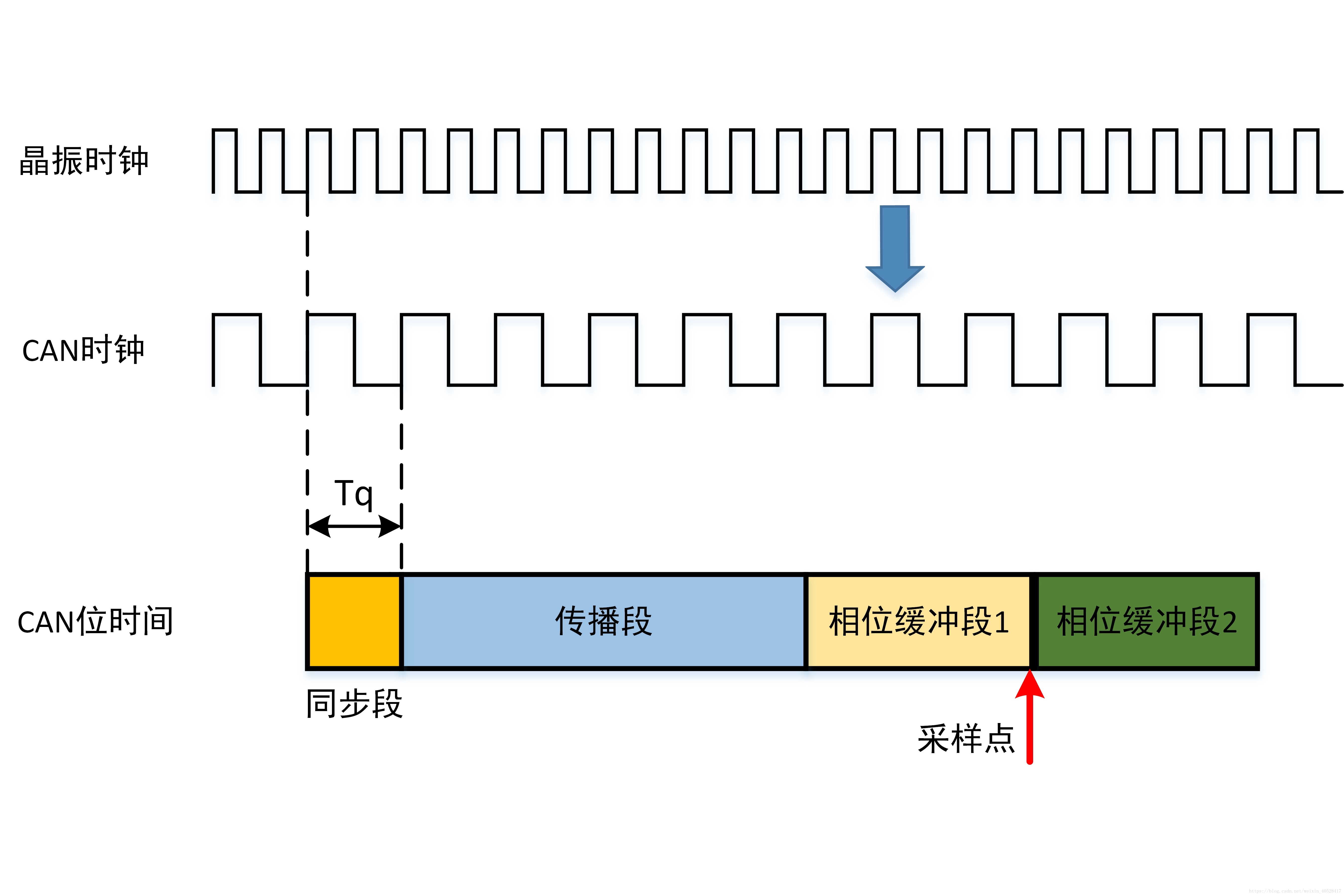
首先了解以下CAN总线系统中的两个时钟:晶振时钟周期和CAN时钟周期
- 晶振时钟周期:是由单片机振荡器的晶振频率决定的,指的是振荡器每震荡一次所消耗的时间长度,也是整个系统中最小的时间单位。
- CAN时钟周期:CAN时钟是由系统时钟分频而来的一个时间长度值,实际上就是一个时间份额Tq。可以按照下面的公式计算:
- CANCAN时钟周期=2×晶振时钟周期×BRP
其中BRP叫做波特率预分频值(baudrate prescaler)。
1.2.2 位时间的分段
如上文所述,在CAN的位定时中,一个CAN时钟周期称为一个时间量子 — Tq。
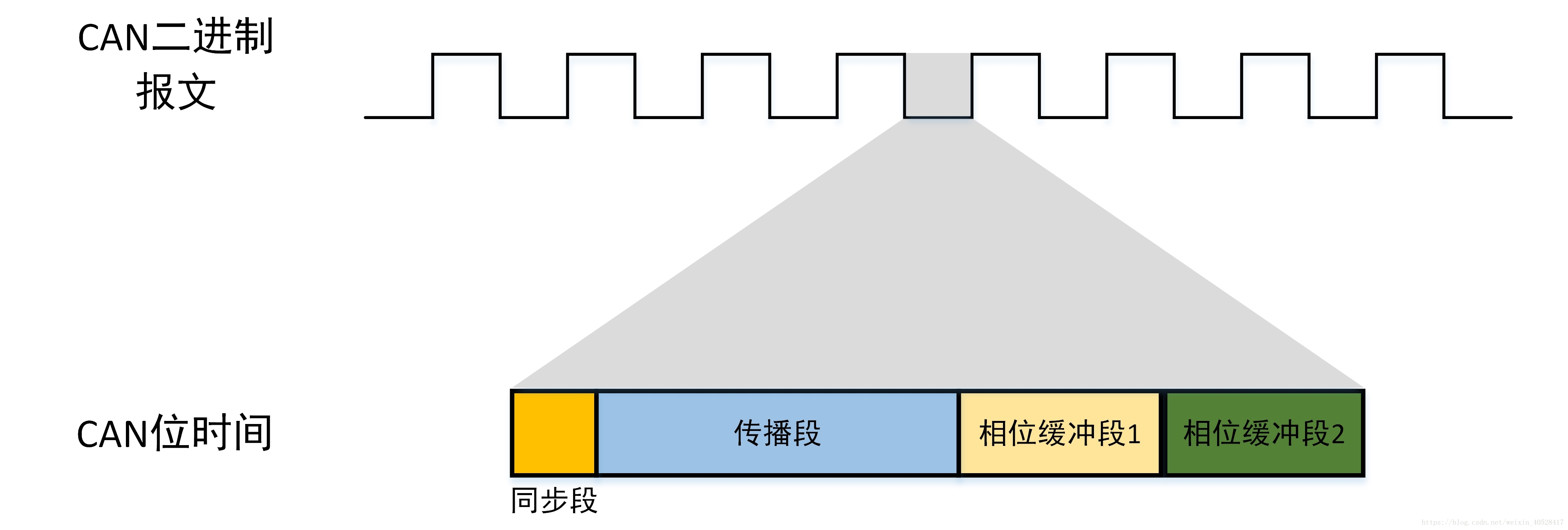
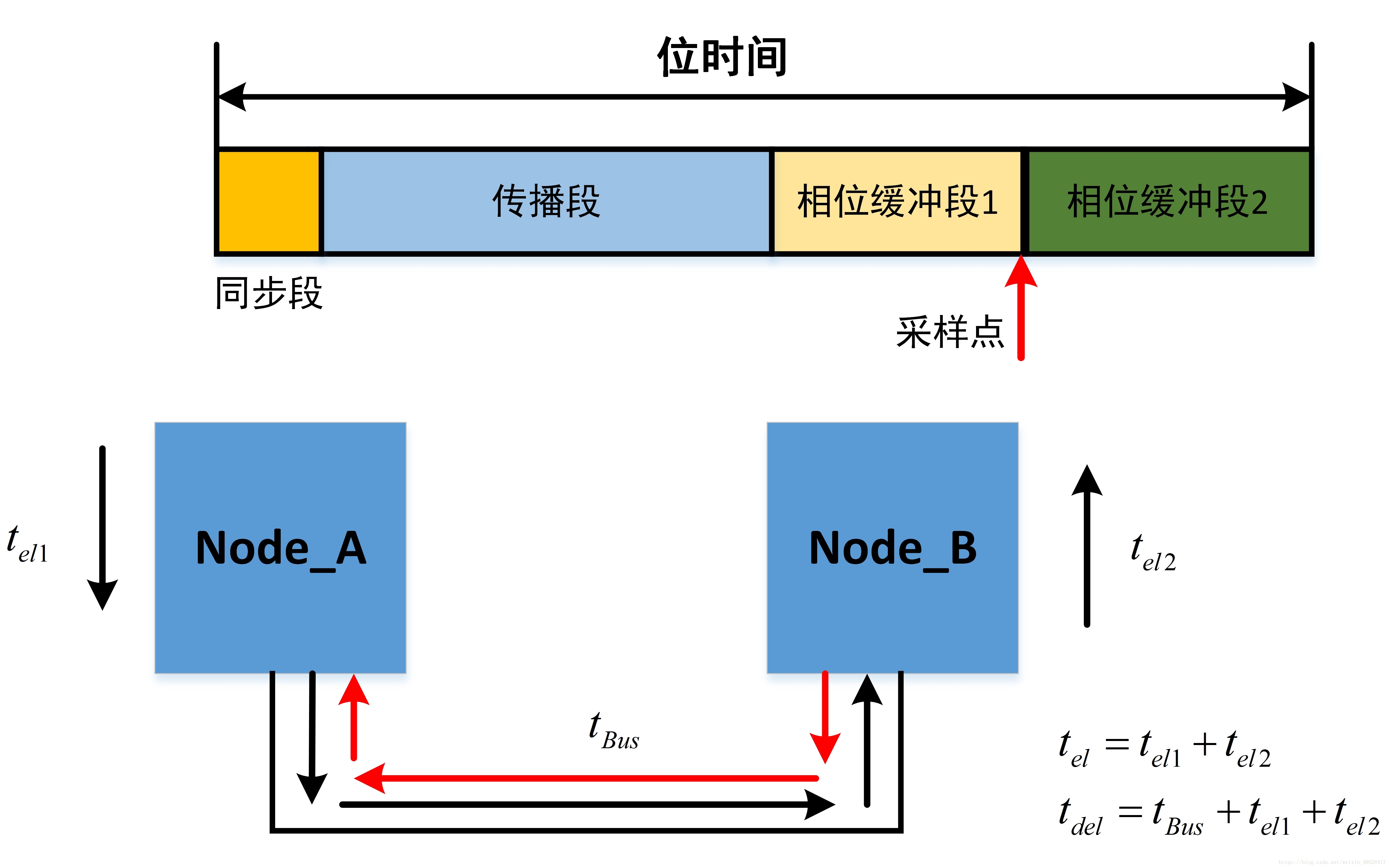
如下图所示:位时间分为四个段:同步段、传播段、相位缓冲段1、相位缓冲段2,总共8~25个时间量子(Tq)。
1)同步段(Synchronization Segment):
- 长度固定,1个时间量子Tq;
- 一个位的传输从同步段开始;
- 同步段用于同步总线上的各个节点,一个位的跳边沿在此时间段内。
2)传播段(Propagation Segment):
- 传播段用于补偿报文在总线和节点上传输时所产生的时间延迟;
- 传播段时长 ≥ 2 × 报文在总线和节点上传输时产生的时间延迟 ;
- 传播段时长可编程(1~8个时间量子Tq)。
3)相位缓冲段1(Phase Buffer Segment1):
- 用于补偿节点间的晶振误差;
- 允许通过重同步对该段加长;
- 在这个时间段的末端进行总线状态的采样;
- 长度可编程(1~8个时间量子Tq)
4)相位缓冲段2(Phase Buffer Segment2):
- 用于补偿节点间的晶振误差;
- 允许通过重同步对该段缩短;
- 长度可编程(1~8个时间量子Tq)
于是
tBit:位时间
tSS:同步段时间
tPS:传播段时间
tPBS1:时间段1
tPBS2:时间段2
二、CAN的同步机制
在CAN通信中,有两种同步机制:硬同步与重同步。
2.1 同步的规则
☆ 一个位时间内只允许一种同步方式,要么硬同步要么重同步;
☆ 任何一个从“隐性”到“显性”的下降沿 都可以用于同步;
☆ 硬同步发生在报文的SOF位,所有接收节点调整各自当前位的同步段,使其位于发送的SOF位内;
☆ 重同步发生在一个报文SOF位之外的其它段,当下降沿落在了同步段之外时发生重同步;
☆ 在SOF到仲裁场发送的时间段内,如果有多个节点同时发送报文,那么这些发送节点对跳变沿不进行重同步
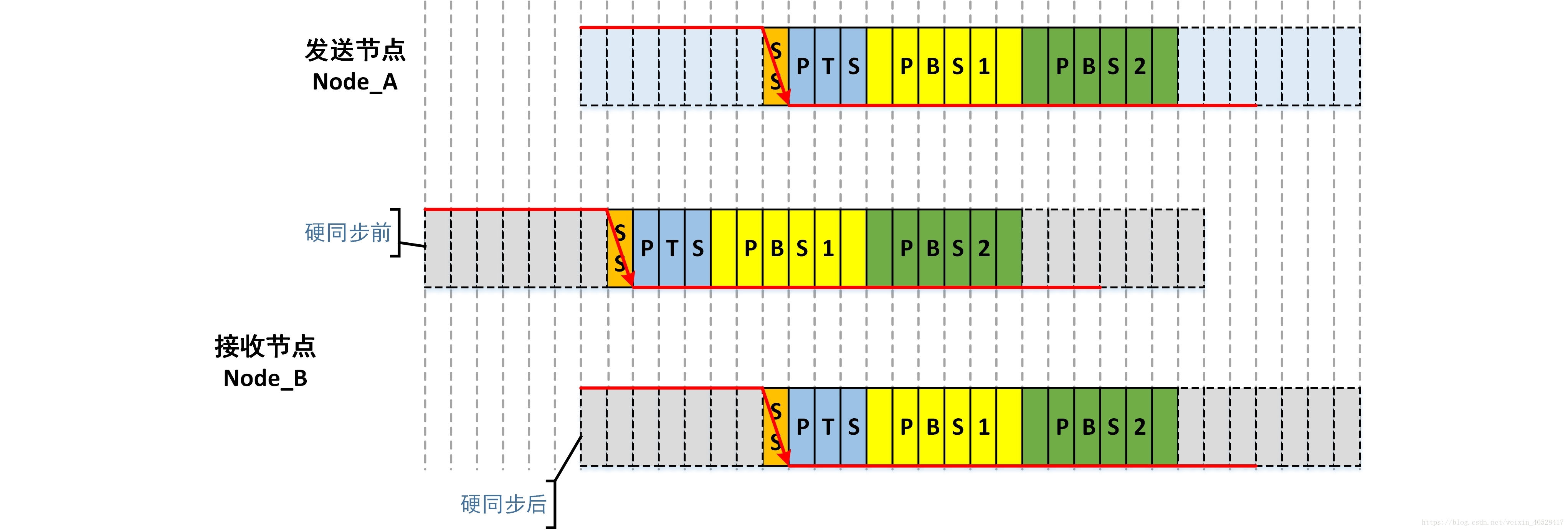
2.2 硬同步
硬同步发生在SOF位,所有接收节点调整各自当前位的同步段,调整宽度不限
(1)发送节点Node_A在发送SOF位时,SOF位的下降沿在SS段;
(2)这个时候接收节点Node_B发现自己当前位的SS段和发送节点SOF位的SS段不同步。也就是说当Node_A产生SOF位SS段时,Node_B的当前位的SS段已经在5个Tq之前产生了;
(3)于是接收节点Node_B强行将自己当前位的SS段拉到与SOF位的SS段同步。
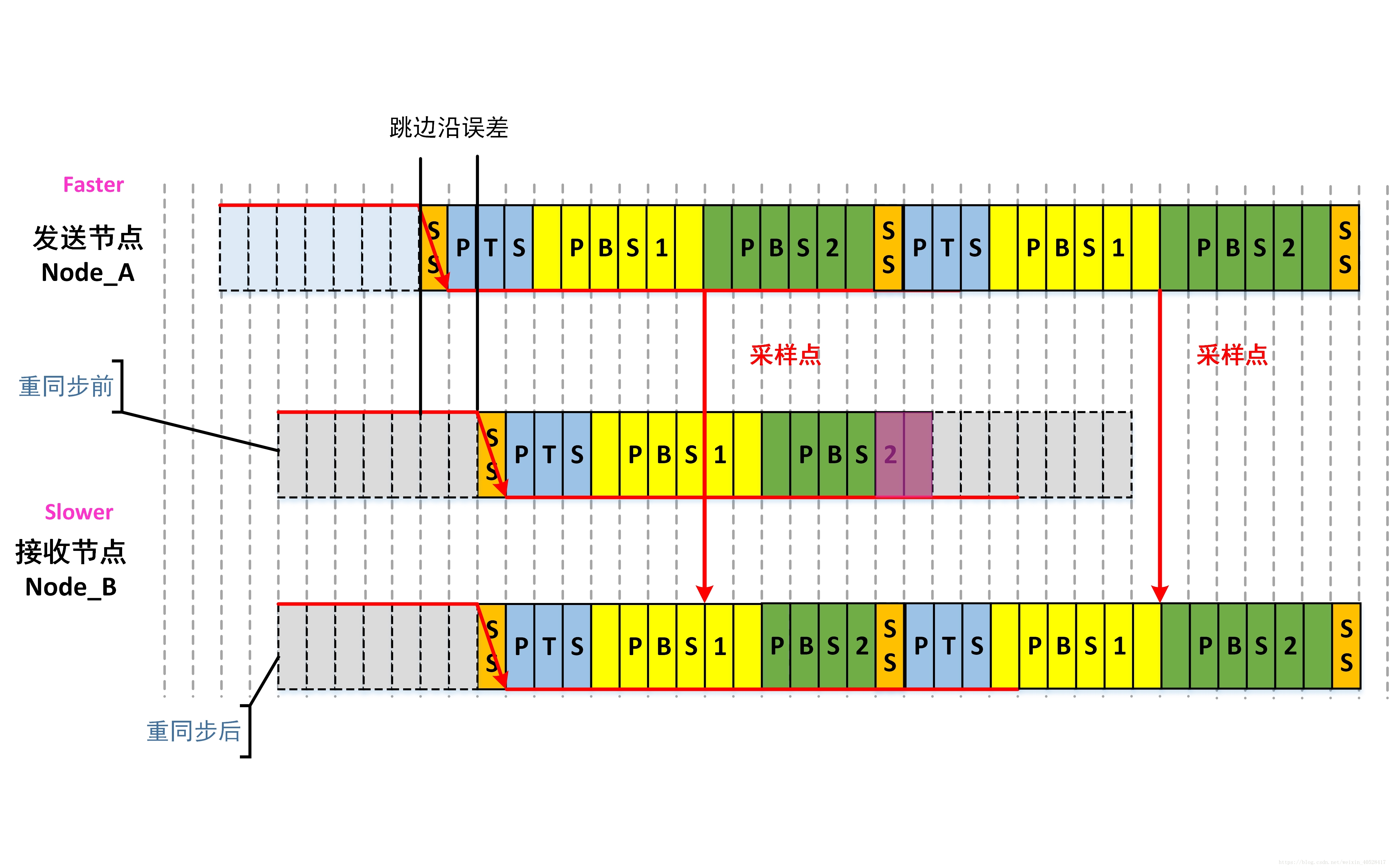
2.3 重同步
重同步发生在一个报文SOF位之外的其它位场内,当接收节点Node_B当前位的下降沿落在了发送节点Node_A当前位的同步段之外时发生重同步。
重同步会导致相位缓冲段1的延长或者相位缓冲段2的缩短,从而保证采样点的准确。
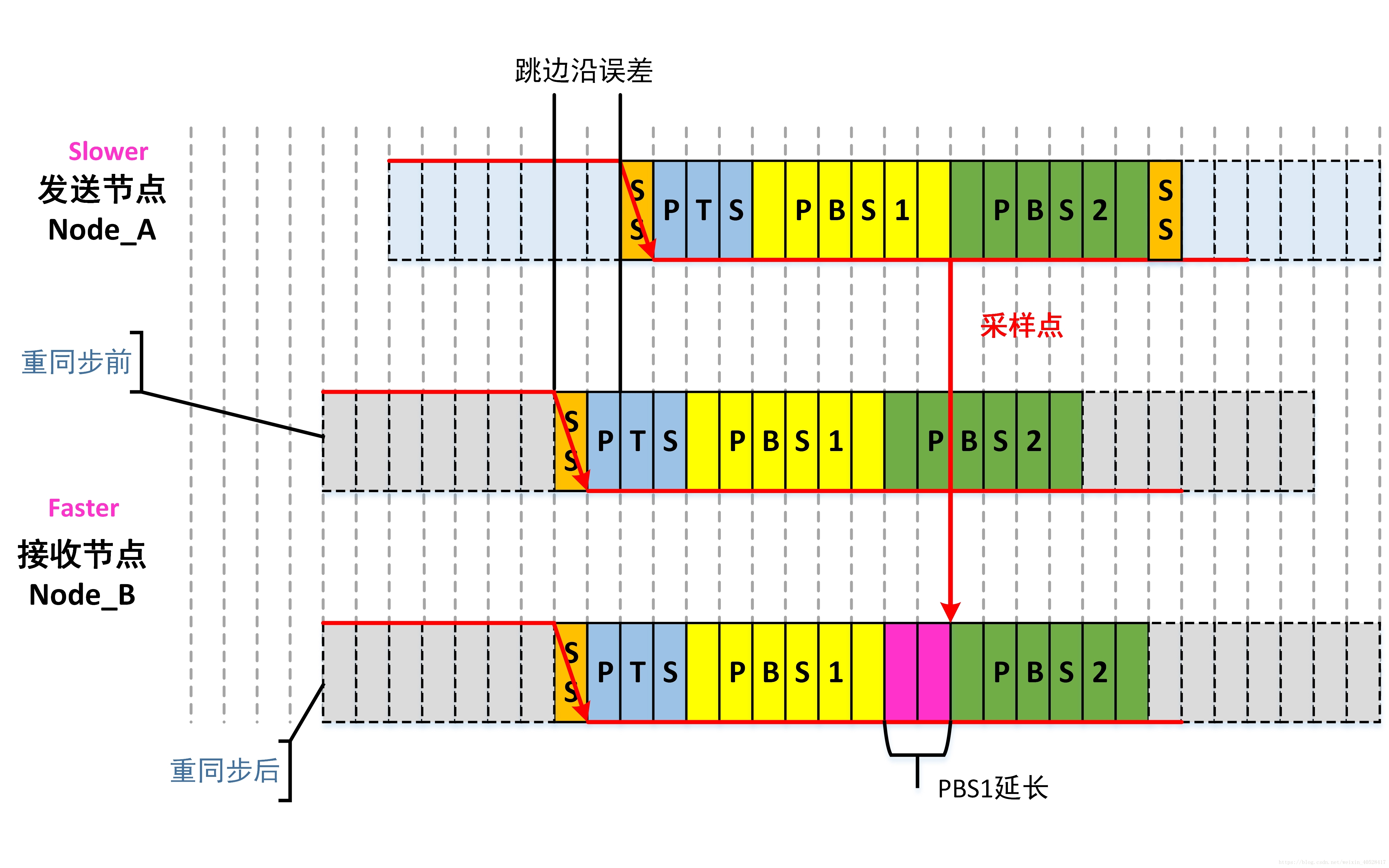
2.3.1 PBS1 延长
发的晚(慢),收的早(块),导致PBS1延长。
如上图所示:
(1)发送节点Node_A比接收节点Node_B的时间慢了,也就是说Node_A当前位的ss段产生的时候,Node_B 当前位的ss段已经在2个Tq之前产生了;
(2)所以这个时候接收节点Node_B就将PBS1延长2个Tq的时间;
(3)于是这个时候Node_A当前位的采样点就和Node_B的采样点同步了。
2.3.2 PBS2 缩短
发的早(快),收的晚(慢),导致PBS2缩短。
如上图所示:
(1)发送节点Node_A当前位的SS段诞生2Tq时长之后,接收节点Node_B的当前位才产生SS段;
(2)于是,接收节点Node_B当前位的PBS2段缩短,
(3)这样就会导致接收节点Node_B的下一位能够提前2个Tq,从而Node_B的下一位采样点和Node_A下一位的采样点能够同步。
2.3.3 同步跳转宽度
在重同步时,有个同步跳转宽度(SJW,Synchro Jump Width)的概念,表示的是PBS1和PBS2重同步时允许跳转的最大宽度。
同步跳转宽度必须满足以下几个条件:
- SJW必须小于PBS1和PBS2的最小值
- SJW最大值不能超过4
三、位定时参数的确定
位定时的参数主要涉及以下几个:
(1)位速率:单位为bps、Kbps、Mbps
(2)位时间:tBit,单位一般为纳秒(ns)
tBit=1位速率
(3)时间量子Tq:
Tq=1NBT
NBT 表示的是一个位时间tBit内包含Tq的个数。
(4)传输延迟时间tPTS
CAN报文在CAN总线上的传输时,物理延迟包含两个部分:
- 在CAN-BUS上传输造成的延迟
- 在节点上传输造成延迟
按照CAN通信协议的规定,补偿给传播延迟的时间长度要至少等于实际实际传播延迟时长的2被,即:tPTS≥2×ttPTS≥2×tdel=2×(tdel+tBus)
需要注意的是:
Tips: 在CAN总线通信系统中是以时间量子Tq来度量时间的,所以如果延迟补偿时间tPTS = 3.1Tq,那么这个时候要取:tPTS = 4Tq。
(5)相位缓冲段
相位缓冲段的时间长度分为两种情况:
if (NBT-1-tPTS_Tq)/2==偶数 PBS1_Tq = PBS2_Tq = (NBT-1-tPTS_Tq)/2else PBS1_Tq = (NBT-1-tPTS_Tq)/2 PBS2_Tq = PBS1_Tq +1(6) 同步跳转宽度
SJW=min(PBS1_Tq,4)
(7) 验证晶振误差Df
CAN总线的晶振误差必须同时满足下面三个条件:
- Df<=
Df<=SJW(2×10×NBT) - Df<=Df<=min(PBS1_Tq,PBS2_Tq)2×(13×NBT−PBS2_Tq)
- Df≤1.58
Df≤1.58%
本篇随笔转自: blog.csdn.net/weixin_40528417/article/details/79936476,感谢博主!
CAN总线学习记录之四:位定时与同步的更多相关文章
- Lua和C++交互 学习记录之四:全局table交互
主要内容转载自:子龙山人博客(强烈建议去子龙山人博客完全学习一遍) 部分内容查阅自:<Lua 5.3 参考手册>中文版 译者 云风 制作 Kavcc vs2013+lua-5.3.3 1 ...
- CAN总线学习记录之三:总线中主动错误和被动错误的通俗解释
首先建议把广泛使用的"主动错误"和"被动错误"概念换成"主动报错"和"被动报错". 1. 主动报错站点 只要检查到错误, ...
- CAN总线学习记录之一:CAN简介
CAN 是 Controller Area Net 的缩写,即控制器局部网,是一种有效支持分布控制或实时控制的串行通信网络.CAN 是德国 Bosch 公司为汽车的监测.控制系统而设计的,如控制发动机 ...
- CAN总线学习记录之二:系统结构与帧结构
CAN总线系统结构 CAN 控制器 接收控制单元中微处理器发出的数据,处理数据并传给 CAN 收发器 CAN 收发器 将数据传到总线 or 从总线接收数据给 CAN 控制器 CAN 数据传递终端 避 ...
- python2.7学习记录之四
1.从raw_input()读取的内容永远以字符串的形式返回,把字符串和整数比较就不会得到期待的结果,必须先用int()把字符串转换为我们想要的整型 2.list增加元素 为 append() 3.d ...
- Lua和C++交互 学习记录之九:在Lua中以面向对象的方式使用C++注册的类
主要内容转载自:子龙山人博客(强烈建议去子龙山人博客完全学习一遍) 部分内容查阅自:<Lua 5.3 参考手册>中文版 译者 云风 制作 Kavcc vs2013+lua-5.3.3 在 ...
- Lua和C++交互 学习记录之八:C++类注册为Lua模块
主要内容转载自:子龙山人博客(强烈建议去子龙山人博客完全学习一遍) 部分内容查阅自:<Lua 5.3 参考手册>中文版 译者 云风 制作 Kavcc vs2013+lua-5.3.3 1 ...
- Lua和C++交互 学习记录之七:C++全局函数注册为Lua模块
主要内容转载自:子龙山人博客(强烈建议去子龙山人博客完全学习一遍) 部分内容查阅自:<Lua 5.3 参考手册>中文版 译者 云风 制作 Kavcc vs2013+lua-5.3.3 1 ...
- Lua和C++交互 学习记录之六:全局函数交互
主要内容转载自:子龙山人博客(强烈建议去子龙山人博客完全学习一遍) 部分内容查阅自:<Lua 5.3 参考手册>中文版 译者 云风 制作 Kavcc vs2013+lua-5.3.3 1 ...
随机推荐
- ionic-基于angularjs实现的多级城市选择组件
大家都知道在移动端的选择地区组件,大部分都是模拟IOS选择器做的城市三级联动,但是在IOS上比较好,在Android上因为有的不支持ion-scroll.所以就会出现滚动不会自动回滚到某一个的正中间. ...
- sqlserver 评估过期
解决:重新打开安装中心->维护-->版本升级 ,重新输入序列号 即可 sqlserver2008企业级序列号:JD8Y6-HQG69-P9H84-XDTPG-34MBB
- JS中[object object]怎么取值
错误信息:本来是要显示JSON对象的 结果控制台打印了[object object] 需要做一个简单的转换,如下: var jsonData = JSON.stringify(data);// 转成 ...
- [LeetCode] Flipping an Image 翻转图像
Given a binary matrix A, we want to flip the image horizontally, then invert it, and return the resu ...
- ES 6 proimse &&iterator &&Generator函数 &&async
1.proimse 异步调用function getData(){ let promise =new Promise((resolve,reject)); let xmlHttp =new XMLHt ...
- unittest中的Empty suite错误
import unittest from selenium import webdriver class ibdata(unittest.TestCase): @classmethod def set ...
- Spring源码工程导入Eclsipse缺少两个jar文件
按照<Spring源码深度解析>所述,使用gradle cleanidea eclipse将Spring源码转为eclipse工程后,导入eclipse,最后发现还是缺少spring-cg ...
- java内存分页计算
介绍三个最常用的分页算法 First(感觉这个最简单实用) //总记录数int rows=21; //每页显示的记录数int pageSize=5; //页数int pageSum=(rows-1)/ ...
- 惊奇!用Java也能实现比特币系统
最近区块链技术突然爆火,身边做技术的朋友茶余饭后不谈点区块链什么的都被认为是跟不上时代了,为啥会这样了? 这其实跟比特币价格去年的突飞猛进是分不开的,比特币价格从去年初不到一千美金到今年初最高接近两万 ...
- Java语言
Java语言基础教程 本文将放入菜单栏中方便学习,记得点赞哦! Java分为3个体系,为JavaSE,JavaEE,JavaME,是一种面向对象的程序设计语言,记住Oracle公司收购了 Sum公司, ...