pytorch识别CIFAR10:训练ResNet-34(自定义transform,动态调整学习率,准确率提升到94.33%)
版权声明:本文为博主原创文章,欢迎转载,并请注明出处。联系方式:460356155@qq.com
前面通过数据增强,ResNet-34残差网络识别CIFAR10,准确率达到了92.6。
这里对训练过程增加2个处理:
1、训练数据集做进一步处理:对图片随机加正方形马赛克。
2、每50个epoch,学习率降低0.1倍。
代码具体修改如下:
自定义transform:
class Cutout(object):
def __init__(self, hole_size):
# 正方形马赛克的边长,像素为单位
self.hole_size = hole_size def __call__(self, img):
return cutout(img, self.hole_size) def cutout(img, hole_size):
y = np.random.randint(32)
x = np.random.randint(32) half_size = hole_size // 2 x1 = np.clip(x - half_size, 0, 32)
x2 = np.clip(x + half_size, 0, 32)
y1 = np.clip(y - half_size, 0, 32)
y2 = np.clip(y + half_size, 0, 32) imgnp = np.array(img) imgnp[y1:y2, x1:x2] = 0
img = Image.fromarray(imgnp.astype('uint8')).convert('RGB')
return img
数据集处理修改:
transform_train = transforms.Compose([
# 对原始32*32图像四周各填充4个0像素(40*40),然后随机裁剪成32*32
transforms.RandomCrop(32, padding=4), # 随机马赛克,大小为6*6
Cutout(6), # 按0.5的概率水平翻转图片
transforms.RandomHorizontalFlip(), transforms.ToTensor(),
transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])]) transform_test = tv.transforms.Compose([
transforms.ToTensor(),
transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])]) # 定义数据集
train_data = tv.datasets.CIFAR10(root=ROOT, train=True, download=True, transform=transform_train)
test_data = tv.datasets.CIFAR10(root=ROOT, train=False, download=False, transform=transform_test)
训练过程中调整学习率:
for epoch in range(1, args.epochs + 1):
if epoch % 50 == 0:
lr = args.lr * (0.1 ** (epoch // 50)) for params in optimizer.param_groups:
params['lr'] = lr net_train(net, train_load, optimizer, epoch, args.log_interval) # 每个epoch结束后用测试集检查识别准确度
net_test(net, test_load, epoch)
运行结果如下:
Files already downloaded and verified
ResNet34(
(first): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace)
(3): MaxPool2d(kernel_size=3, stride=1, padding=1, dilation=1, ceil_mode=False)
)
(layer1): Sequential(
(0): ResBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): ResBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): ResBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer2): Sequential(
(0): ResBlock(
(conv1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2))
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): ResBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): ResBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(3): ResBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer3): Sequential(
(0): ResBlock(
(conv1): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(128, 256, kernel_size=(1, 1), stride=(2, 2))
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): ResBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): ResBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(3): ResBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(4): ResBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(5): ResBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer4): Sequential(
(0): ResBlock(
(conv1): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2))
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): ResBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): ResBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(avg_pool): AvgPool2d(kernel_size=4, stride=4, padding=0)
(fc): Linear(in_features=512, out_features=10, bias=True)
)
one epoch spend: 0:01:11.775634
EPOCH:1, ACC:44.28
one epoch spend:
0:01:12.244757
EPOCH:2, ACC:54.46
one epoch spend:
0:01:12.360205
EPOCH:3, ACC:56.84
............
one epoch spend: 0:01:19.172188
EPOCH:198, ACC:94.2
one epoch spend:
0:01:19.213334
EPOCH:199, ACC:94.19
one epoch spend:
0:01:19.222612
EPOCH:200, ACC:94.21
CIFAR10 pytorch
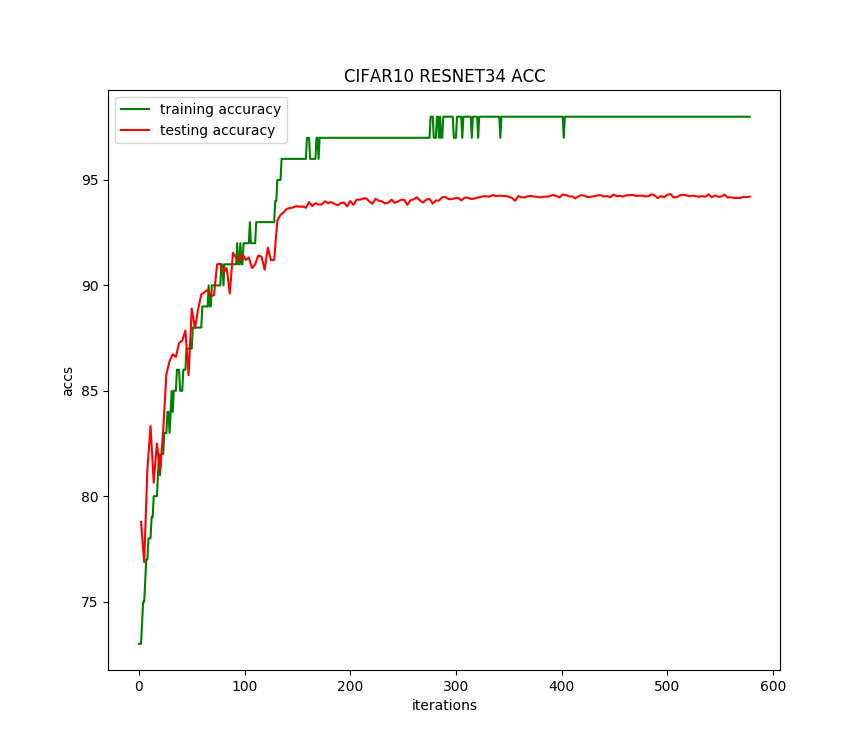
ResNet34 Train: EPOCH:200, BATCH_SZ:128, LR:0.1, ACC:94.33
train spend time:
4:21:32.548834
运行200个迭代,每个迭代耗时80秒,准确率提升了1.73%,达到94.33%。准确率变化曲线如下:
pytorch识别CIFAR10:训练ResNet-34(自定义transform,动态调整学习率,准确率提升到94.33%)的更多相关文章
- pytorch识别CIFAR10:训练ResNet-34(准确率80%)
版权声明:本文为博主原创文章,欢迎转载,并请注明出处.联系方式:460356155@qq.com CNN的层数越多,能够提取到的特征越丰富,但是简单地增加卷积层数,训练时会导致梯度弥散或梯度爆炸. 何 ...
- pytorch识别CIFAR10:训练ResNet-34(数据增强,准确率提升到92.6%)
版权声明:本文为博主原创文章,欢迎转载,并请注明出处.联系方式:460356155@qq.com 在前一篇中的ResNet-34残差网络,经过减小卷积核训练准确率提升到85%. 这里对训练数据集做数据 ...
- pytorch识别CIFAR10:训练ResNet-34(微调网络,准确率提升到85%)
版权声明:本文为博主原创文章,欢迎转载,并请注明出处.联系方式:460356155@qq.com 在前一篇中的ResNet-34残差网络,经过训练准确率只达到80%. 这里对网络做点小修改,在最开始的 ...
- pytorch 动态调整学习率 重点
深度炼丹如同炖排骨一般,需要先大火全局加热,紧接着中火炖出营养,最后转小火收汁.本文给出炼丹中的 “火候控制器”-- 学习率的几种调节方法,框架基于 pytorch 1. 自定义根据 epoch 改变 ...
- 深度学习识别CIFAR10:pytorch训练LeNet、AlexNet、VGG19实现及比较(二)
版权声明:本文为博主原创文章,欢迎转载,并请注明出处.联系方式:460356155@qq.com AlexNet在2012年ImageNet图像分类任务竞赛中获得冠军.网络结构如下图所示: 对CIFA ...
- 深度学习识别CIFAR10:pytorch训练LeNet、AlexNet、VGG19实现及比较(三)
版权声明:本文为博主原创文章,欢迎转载,并请注明出处.联系方式:460356155@qq.com VGGNet在2014年ImageNet图像分类任务竞赛中有出色的表现.网络结构如下图所示: 同样的, ...
- PyTorch Tutorials 4 训练一个分类器
%matplotlib inline 训练一个分类器 上一讲中已经看到如何去定义一个神经网络,计算损失值和更新网络的权重. 你现在可能在想下一步. 关于数据? 一般情况下处理图像.文本.音频和视频数据 ...
- Pytorch多GPU训练
Pytorch多GPU训练 临近放假, 服务器上的GPU好多空闲, 博主顺便研究了一下如何用多卡同时训练 原理 多卡训练的基本过程 首先把模型加载到一个主设备 把模型只读复制到多个设备 把大的batc ...
- CNN+BLSTM+CTC的验证码识别从训练到部署
项目地址:https://github.com/kerlomz/captcha_trainer 1. 前言 本项目适用于Python3.6,GPU>=NVIDIA GTX1050Ti,原mast ...
随机推荐
- DataIntegrityViolationException
今天出现了这个问题: org.springframework.dao.DataIntegrityViolationException: Could not execute JDBC batch upd ...
- ubuntu上配置nginx实现反向代理
反向代理 反向代理(Reverse Proxy)方式是指以代理服务器来接受internet上的连接请求,然后将请求转发给内部网络上的服务器,并将从服务器上得到的结果返回给internet上请求连接的客 ...
- Docker进阶之七:管理应用程序数据
管理应用程序数据:Volume Docker提供三种不同的方式将数据从宿主机挂载到容器中:volumes,bind mounts和tmpfs. volumes:Docker管理宿主机文件系统的一部分( ...
- 从QA到工程能效团队
Engineering Productivity Productivity is our job; testing and quality are the job of everyone involv ...
- c# 解决Randoms伪随机重复问题
/// <summary> /// 解决伪随机问题 /// </summary> public static void Random() { ; ; i < ; i++) ...
- 筛选出和该元素相交的元素之BoundingBoxIntersectsFilter
//假设元素为ee BoundingBoxXYZ box = ee.get_BoundingBox(doc.ActiveView); //创建outline,通过boundingboxintersec ...
- LeetCode_406. Queue Reconstruction by Height解题思路
题目如下: Suppose you have a random list of people standing in a queue. Each person is described by a pa ...
- 可以让你神操作的手机APP推荐 个个都是爆款系列
手机在我们的生活中显得日益重要,根据手机依赖度调查显示,69%的人出门时必带手机,20%的人经常在吃饭睡觉.上卫生间时使用手机:43%的人早上起床第一件事就是查看手机,不用多说,我们对于手机的依赖性越 ...
- python内存回收的问题
python实际上,对于占用很大内存的对象,并不会马上释放. 举例,a=range(10000*10000),会发现内存飙升一个多G,del a 或者a=[]都不能将内存降下来.. del 可以删除多 ...
- Window10上安装Redis及其客户端
资源下载地址 Redis安装包:https://github.com/MicrosoftArchive/redis/releases Redis客户端: 链接:https://pan.baidu.co ...