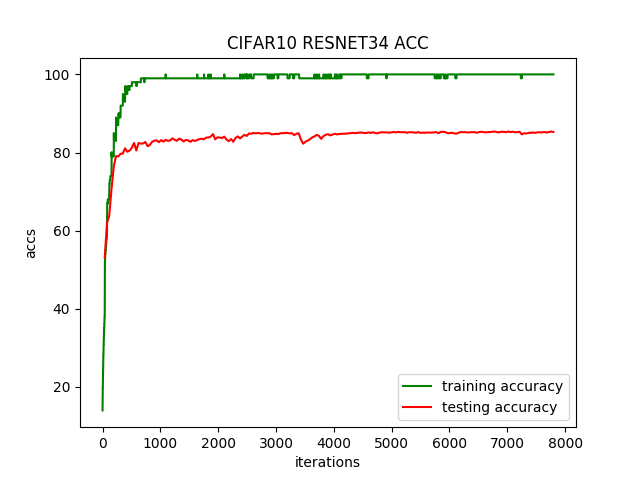
pytorch识别CIFAR10:训练ResNet-34(微调网络,准确率提升到85%)
版权声明:本文为博主原创文章,欢迎转载,并请注明出处。联系方式:460356155@qq.com
在前一篇中的ResNet-34残差网络,经过训练准确率只达到80%。
这里对网络做点小修改,在最开始的卷积层中用更小(3*3)的卷积核,并且不缩小图片尺寸,相应的最后的平均池化的核改为4*4。
具体修改如下:
class ResNet34(nn.Module):
def __init__(self, block):
super(ResNet34, self).__init__() # 初始卷积层核池化层
self.first = nn.Sequential(
# 卷基层1:3*3kernel,1stride,1padding,outmap:32-3+1*2 / 1 + 1,32*32
nn.Conv2d(3, 64, 3, 1, 1),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True), # 最大池化,3*3kernel,1stride(保持尺寸),1padding,
# outmap:32-3+2*1 / 1 + 1,32*32
nn.MaxPool2d(3, 1, 1)
) # 第一层,通道数不变
self.layer1 = self.make_layer(block, 64, 64, 3, 1) # 第2、3、4层,通道数*2,图片尺寸/2
self.layer2 = self.make_layer(block, 64, 128, 4, 2) # 输出16*16
self.layer3 = self.make_layer(block, 128, 256, 6, 2) # 输出8*8
self.layer4 = self.make_layer(block, 256, 512, 3, 2) # 输出4*4 self.avg_pool = nn.AvgPool2d(4) # 输出512*1
self.fc = nn.Linear(512, 10)
运行结果:
Files already downloaded and verified
ResNet34(
(first): Sequential(
(0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace)
(3): MaxPool2d(kernel_size=3, stride=1, padding=1, dilation=1, ceil_mode=False)
)
(layer1): Sequential(
(0): ResBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): ResBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): ResBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer2): Sequential(
(0): ResBlock(
(conv1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2))
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): ResBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): ResBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(3): ResBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer3): Sequential(
(0): ResBlock(
(conv1): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(128, 256, kernel_size=(1, 1), stride=(2, 2))
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): ResBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): ResBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(3): ResBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(4): ResBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(5): ResBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer4): Sequential(
(0): ResBlock(
(conv1): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1))
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2))
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): ResBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): ResBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(avg_pool): AvgPool2d(kernel_size=4, stride=4, padding=0)
(fc): Linear(in_features=512, out_features=10, bias=True)
)
one epoch spend: 0:00:55.832303
EPOCH:1, ACC:53.05
one epoch spend: 0:00:54.158082
EPOCH:2, ACC:61.94
......
one epoch spend: 0:00:54.178677
EPOCH:199, ACC:85.37
one epoch spend: 0:00:53.657917
EPOCH:200, ACC:85.25
CIFAR10 pytorch ResNet34 Train: EPOCH:200, BATCH_SZ:128, LR:0.1, ACC:85.38
train spend time: 3:11:21.618257
运行200个迭代,每个迭代耗时54秒,准确率提升了5%,达到85%。准确率变化曲线如下:
pytorch识别CIFAR10:训练ResNet-34(微调网络,准确率提升到85%)的更多相关文章
- pytorch识别CIFAR10:训练ResNet-34(数据增强,准确率提升到92.6%)
版权声明:本文为博主原创文章,欢迎转载,并请注明出处.联系方式:460356155@qq.com 在前一篇中的ResNet-34残差网络,经过减小卷积核训练准确率提升到85%. 这里对训练数据集做数据 ...
- pytorch识别CIFAR10:训练ResNet-34(准确率80%)
版权声明:本文为博主原创文章,欢迎转载,并请注明出处.联系方式:460356155@qq.com CNN的层数越多,能够提取到的特征越丰富,但是简单地增加卷积层数,训练时会导致梯度弥散或梯度爆炸. 何 ...
- pytorch识别CIFAR10:训练ResNet-34(自定义transform,动态调整学习率,准确率提升到94.33%)
版权声明:本文为博主原创文章,欢迎转载,并请注明出处.联系方式:460356155@qq.com 前面通过数据增强,ResNet-34残差网络识别CIFAR10,准确率达到了92.6. 这里对训练过程 ...
- 深度学习识别CIFAR10:pytorch训练LeNet、AlexNet、VGG19实现及比较(二)
版权声明:本文为博主原创文章,欢迎转载,并请注明出处.联系方式:460356155@qq.com AlexNet在2012年ImageNet图像分类任务竞赛中获得冠军.网络结构如下图所示: 对CIFA ...
- 深度学习识别CIFAR10:pytorch训练LeNet、AlexNet、VGG19实现及比较(三)
版权声明:本文为博主原创文章,欢迎转载,并请注明出处.联系方式:460356155@qq.com VGGNet在2014年ImageNet图像分类任务竞赛中有出色的表现.网络结构如下图所示: 同样的, ...
- PyTorch Tutorials 4 训练一个分类器
%matplotlib inline 训练一个分类器 上一讲中已经看到如何去定义一个神经网络,计算损失值和更新网络的权重. 你现在可能在想下一步. 关于数据? 一般情况下处理图像.文本.音频和视频数据 ...
- Caffe fine-tuning 微调网络
转载请注明出处,楼燚(yì)航的blog,http://www.cnblogs.com/louyihang-loves-baiyan/ 目前呢,caffe,theano,torch是当下比较流行的De ...
- 用pytorch进行CIFAR-10数据集分类
CIFAR-10.(Canadian Institute for Advanced Research)是由 Alex Krizhevsky.Vinod Nair 与 Geoffrey Hinton 收 ...
- 【转】CNN+BLSTM+CTC的验证码识别从训练到部署
[转]CNN+BLSTM+CTC的验证码识别从训练到部署 转载地址:https://www.jianshu.com/p/80ef04b16efc 项目地址:https://github.com/ker ...
随机推荐
- 【重学计算机】计组D1章:计算机系统概论
1.冯诺依曼计算机组成 主机(cpu+内存),外设(输入设备+输出设备+外存),总线(地址总线+数据总线+控制总线) 2.计算机层次结构 应用程序-高级语言-汇编语言-操作系统-指令集架构层-微代码层 ...
- C++ 编译期封装-Pimpl技术
Pimpl技术——编译期封装 Pimpl 意思为“具体实现的指针”(Pointer to Implementation), 它通过一个私有的成员指针,将指针所指向的类的内部实现数据进行隐藏, 是隐藏实 ...
- 深入浅出NIO Socket实现机制
前言 Java NIO 由以下几个核心部分组成: Buffer Channel Selector 以前基于net包进行socket编程时,accept方法会一直阻塞,直到有客户端请求的到来,并返回so ...
- 要搞刷机!从它的尸体上踏过去!钢板云路由!WPR003N复活!成功启动OPENWRT
这是一个很鼓舞人心的标题,自从上一篇Aria2序之导言 00,成功的贴出两张开场图片,本来计划写它的开场引言 01,正好cp一个合格的导引(引导读起来有些奇怪),连续懒惰了好几天,突然想起了WPR00 ...
- 数据结构——Java实现链栈
一.分析 栈是限定仅在表的一端进行插入或删除操作的线性表,对于栈来说,操作端称为栈顶,另一端则称为栈底,栈的修改是按照后进先出的原则进行的,因此又称为后进先出的线性表. 链栈是指采用链式存储结构实现的 ...
- [Java] 为什么字符串比较不能用两个等号(==)
Java中,使用"=="比较字符串时,判断的是两个字符串是否存放在相同的位置.如果两个字符串存放在相同的位置,那么它们就是相同的,使用"=="比较的结果也就是T ...
- git push完代码 想撤回 并保留之前修改的代码 / 修改完代码 发现分支不对 想切换分支 /恢复已修改的文件
git reset --soft xxxx // xxxx是版本号 回退 git stash //保留当前分支修改的代码 git checkout xxx //切换到xxx分支 git stash l ...
- Docker-compose command 有多个命令例子
cat docker-compose.yml version: '3.4' services: klvchen: image: python_django:19.03.0 ports: - 8000: ...
- 【土旦】在vue filters中 优雅的使用对象的key、value来替换 if switch多重判断简化流程
前言 之前写过滤器的时候都是 用 if switch 来进行值的判断 返回对应的值, 在没去百度搜索之前都是都是这样写的 ) { return "支付成功"; } ) { retu ...
- Dotspatial 要素重叠分析
private void toolStripButton30_Click(object sender, EventArgs e) { //面状重叠分析 if (mapMain.Layers.Count ...