ROS文件系统级
ROS的安装就不介绍了,官方教程是最好的:点击打开链接
ROS是机器人操作系统,它应该有自己的工程结构,Linux系统的文件系统如下:

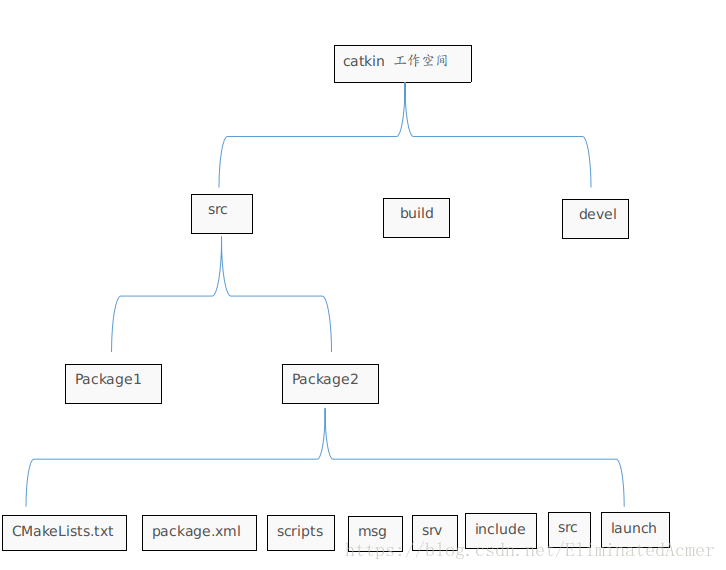
而ROS的文件系统级如下:
接下来逐一介绍它们:
1. catkin 工作空间
工作空间就是管理 ROS 工程和代码的地方,而 catkin 是 ROS 定制的编译构建系统,是对 CMake 的扩展。catkin 工作空间其实就是一个文件夹,用来组织和管理功能包,用 catkin 工具编译。
首先对其进行创建(必须有 src 目录):
mkdir -p ~/catkin_ws/src进入工作空间:
cd ~/catkin_ws/对其进行编译(必须在工作空间进行)
catkin_make如果你的输出像这样:

那就成功了。
这只是完成了编译(编译整个空间),如果要执行某个文件,还需要执行这样一句话:
source ~/catkin_ws/devel/setup.bash刷新环境,这样才不会报错。
2. src,build 和 devel
src 中存放的是 package 源代码,编译完成之后会发现工作空间中多了这两个文件夹,其中 build 中存放的是 cmake 和 catkin 的缓存信息以及中间文件, devel 中存放的则是生成的目标文件,比如头文件,可执行文件,链接库等等。
src 目录下存放着各种各样的功能包,包是 catkin 编译的基本单元。
3.package
又称 功能包,是 ROS 软件的基本组织形式,一个 package 可以包含多个可执行文件(节点),一个最精简的 package,应该如下:

CMakeLists.txt 规定了 catkin 编译的规则,具体写法如下:

package.xml 定义了 package 的属性,例如 包名,版本号,作者等。它的写法如下:

接下来就是将代码放入 package 中,ROS中的代码文件分为 脚本(python,shell) 和 C++(头文件,源文件)。
因此,一般创建 scripts 存放脚本,创建 include 存放 C++ 头文件,src 存放 C++ 源文件。
package 下也可以存放自定义通信格式,分别存放在 srv,msg 和 action 文件夹下。
launch 文件存放在 launch 文件夹下,launch 文件的好处是不用手动编译每一个可执行文件,参数设置文件 yaml 放在 config 文件夹下。
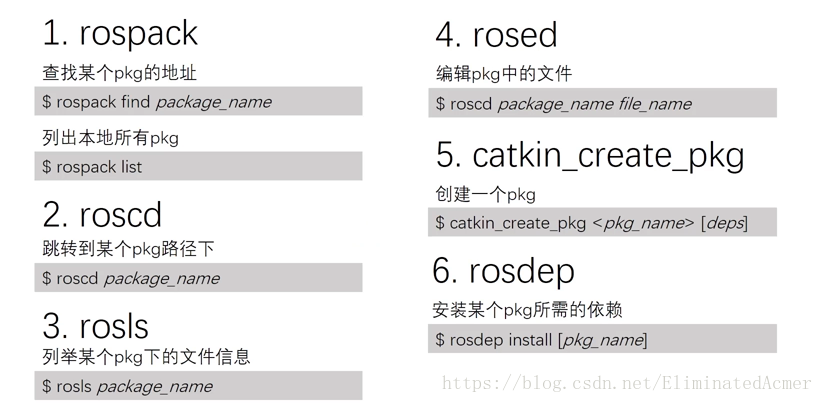
ROS常用命令:
ROS文件系统级的更多相关文章
- ROS学习(三)—— ROS文件系统
一.预备工作 使用ros0tutorials程序包,先下载: sudo apt-get install ros-<distro>-ros-tutorials 其中<distro> ...
- ROS计算图级
上一节说到一个 package 可以包含多个可执行文件(节点),可执行文件需要被运行,就要了解ROS的通信架构,也就是计算图级,例: 小萝卜机器人拥有驱动系统,感知系统,控制系统等,要让它从指定位置到 ...
- 机器人操作系统(ROS)教程4:ROS的框架【转】
转自:http://www.arduino.cn/thread-11351-1-1.html 在进行ROS的代码开发前,有必要了解一些ROS的概念.首先,ROS的系统代码分为两部分:main和univ ...
- Learning ROS for Robotics Programming - Second Edition(《ROS机器人编程学习-第二版》)
Learning ROS for Robotics Programming - Second Edition <ROS机器人编程学习-第二版> ----Your one-stop guid ...
- ROS探索总结(二)——ROS总体框架
个人分类: ROS 所属专栏: ROS探索总结 一. 总体结构 根据ROS系统代码的维护者和分布来标示,主要有两大部分: (1)main:核心部分,主要由Willow G ...
- ROS学习笔记二:ROS系统架构及概念
本文主要是了解ROS的系统架构.文件夹结构以及工作所需的核心文件. ROS系统架构主要被设计和划分为三部分,每一部分代表一个层级的概念:文件系统级(The filesystem level).计算图级 ...
- ROS的文件系统 (二)
ROS的文件系统的基本概念, ROS文件系统中的两个最基本的概念:Package和Manifest,即包和清单文件. Package是组织ROS代码的最基本单位,每一个Package都可以包括库文件, ...
- ROS的文件系统
这篇博客介绍一下ROS的文件系统的基本概念,用户可以直接在官方网站:http://wiki.ros.org/ROS/Tutorials/NavigatingTheFilesystem去查看官方手册. ...
- ROS官网新手级教程总结
第 1 关卡:安装和配置 ROS 环境 目标:在计算机上安装和配置 ROS 环境. 安装 ROS 按照 ROS 安装说明进行安装. 管理环境 确定环境变量 ROS_ROOT 和 ROS_PACKAGE ...
随机推荐
- javascript之typeof
定义和用法
- linux安装imagemagick,centos安装imagemagick方法
1.安装文件格式支持库 yum install tcl-devel libpng-devel libjpeg-devel ghostscript-devel bzip2-devel freetype- ...
- 怎样获取iframe节点的window对象
需要使用iframeElement.contentWindow; var frame = document.getElementById('theFrame'); var frameWindow = ...
- Java开发Hbase示例
Java开发Hbase示例 使用Hbase操作数据 package com.sunteng.clickidc.test; import java.io.IOException; import java ...
- 正确使用SQLCipher来加密Android数据库
Android本身自带有不加密的数据库SQLite,如果要保存密码之类的敏感数据在本地的话方法一是使用字段加密解密算法,方法二是整个数据库都加密掉.如果只是加密解密某个字段(如password)就推荐 ...
- 将网址url中的参数转化为JSON格式的两种方法
在我们进入主题前,我先先看下获取网址URL的方法: window.location.href // 设置或获取整个URL为字符串 window.location.hash // 设置或获取href属性 ...
- jenkins中的流水线( pipeline)的理解(未完)
目录 一.理论概述 Jenkins流水线的发展历程 什么是Jenkins流水线 一.理论概述 pipeline是流水线的英文释义,文档中统一称为流水线 Jenkins流水线的发展历程 在Jenki ...
- HTTP 协议部分常识简介
1.状态码 具体的状态码可以百度查找,但是对于状态码的大致分类有一个清楚的了解 1XX ----信息状态码------接受的请求正在处理 2XX ------成功状态码 ------请求正常处理完 ...
- C++——Inheritence
一种错误的观念: 子类继承父类,只把父类的公有成员继承下来,私有的不会继承. 事实上无论是如何继承,都会把父类的所有成员继承下来. #include<iostream> using nam ...
- python requests包的基本使用
Requests 安装requests模块: D:\Install\Python36>pip3 install requests 请求方式 #coding:utf-8 import reques ...