使用VTK与Python实现机械臂三维模型可视化
三维可视化系统的建立依赖于三维图形平台, 如 OpenGL、VTK、OGRE、OSG等, 传统的方法多采用OpenGL进行底层编程,即对其特有的函数进行定量操作, 需要开发人员熟悉相关函数, 从而造成了开发难度大、 周期长等问题。VTK、 ORGE、OSG等平台使用封装更好的函数简化了开发过程。下面将使用Python与VTK进行机器人上位机监控界面的快速原型开发。
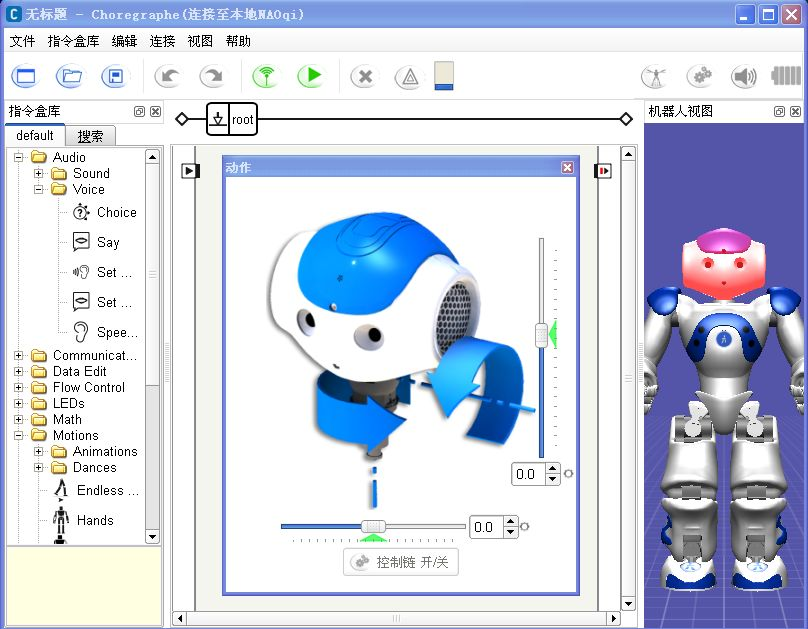
完整的上位机程序需要有三维显示模块、机器人信息监测模块(位置/角度/速度/电量/温度/错误信息...)、通信模块(串口/USB/WIFI/蓝牙...)、控制模块等功能模块。三维显示模块主要用于实时显示机器人的姿态(或位置)信息。比如机器人上肢手臂抬起,程序界面中的虚拟机器人也会同时进行同样的动作。三维显示模块也可以用于对机器人进行控制,实现良好的人机交互。比如在三维图像界面中可以点击拾取机器人某一关节,拖拽部件(肢体)控制真实的机器人完成同样的运动。Aldebaran Robotics的图形化编程软件Choregraphe可以完成上述的一些功能对NAO机器人进行控制。
对于简单的模型可以自己编写函数进行创建,但这种方法做出来的模型过于简单不够逼真。因此可以先在SolidWorks、Blender、3DMax、Maya、Rhino等三维设计软件中建立好模型,然后导出为通用的三维文件格式,再使用VTK将其读入并进行渲染。
在SolidWorks等三维设计软件中设计好机器人的大臂(upperarm)和小臂(forearm),然后创建装配体如下图所示。在将装配体导出为STL文件前需要注意几点:
1. 当从外界读入STL类型的模型时,其会按照它内部的坐标位置进行显示,因此它的位置和大小是确定的。为了以后的定位以及移动、旋转等操作的方便,需要先在SolidWorks中创建一个坐标系。如下图所示,坐标系建立在大臂关节中心点。
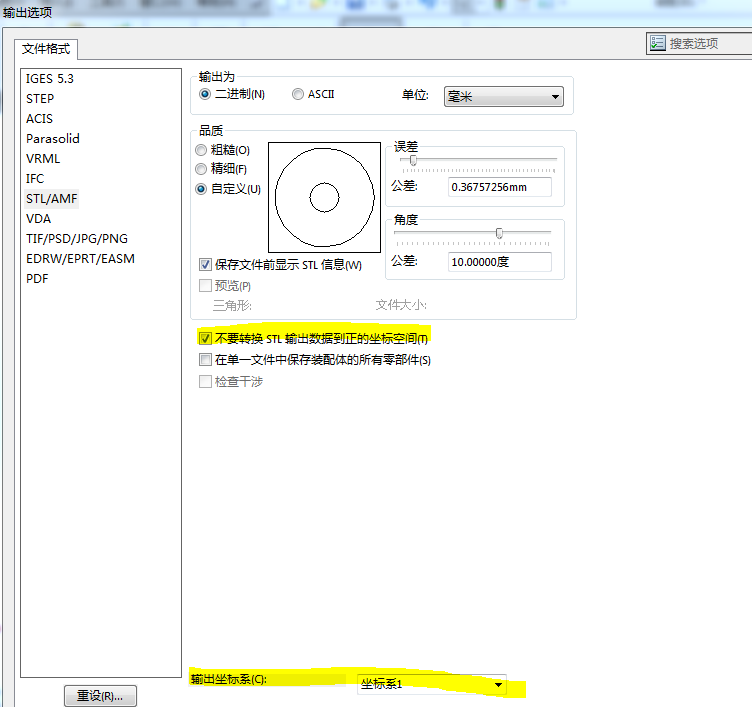
2. 如果将装配体整体输出为一个STL文件,则导入VTK后无法控制零部件进行相对运动。因此,需要将装配体各可动部件分别导出。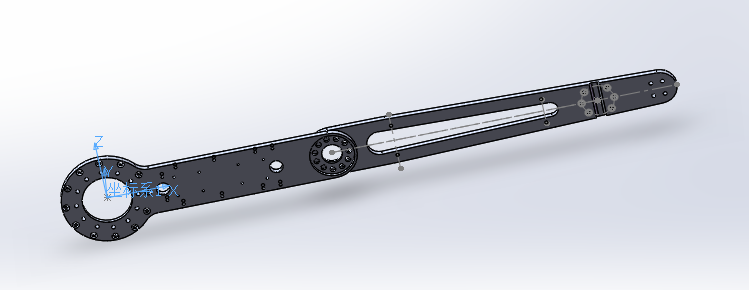
在SolidWorks的另存为STL对话框中,点开输出选项卡,如下图所示。注意之前提到的几点:如果勾选“在单一文件中保存装配体的所有零部件”则会将整个装配体导出为一个STL文件,否则就是分别命名的两个STL文件;输出坐标系下拉列表中选择之前创建的坐标系1,并勾选“不要转换STL输出数据到正的坐标空间”。
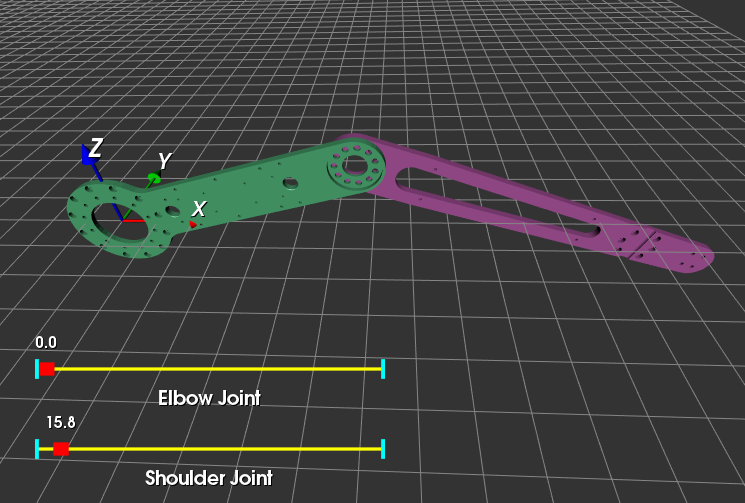
下面的Python代码简单实现了一个2自由度机械臂的三维仿真,可以拖动滑块或按键盘上的方向键控制肩关节或肘关节运动。当然程序还存在一些问题有待完善...
#!/usr/bin/env python import vtk
import math
from vtk.util.colors import * filenames = ["upperarm.stl","forearm.stl"] dt = 1.0 # degree step in rotation
angle = [0, 0] # shoulder and elbow joint angle renWin = vtk.vtkRenderWindow()
assembly = vtk.vtkAssembly()
slider_shoulder = vtk.vtkSliderRepresentation2D()
slider_elbow = vtk.vtkSliderRepresentation2D()
actor = list() # the list of links # Customize vtkInteractorStyleTrackballCamera
class MyInteractor(vtk.vtkInteractorStyleTrackballCamera):
def __init__(self,parent=None):
self.AddObserver("CharEvent",self.OnCharEvent)
self.AddObserver("KeyPressEvent",self.OnKeyPressEvent) # Override the default key operations which currently handle trackball or joystick styles is provided
# OnChar is triggered when an ASCII key is pressed. Some basic key presses are handled here
def OnCharEvent(self,obj,event):
pass def OnKeyPressEvent(self,obj,event):
global angle
# Get the compound key strokes for the event
key = self.GetInteractor().GetKeySym()
# Output the key that was pressed
#print "Pressed: " , key # Handle an arrow key
if(key == "Left"):
actor[1].RotateY(-dt) if(key == "Right"):
actor[1].RotateY(dt) if(key == "Up"):
assembly.RotateY(-dt)
angle[0] += dt
if angle[0] >= 360.0:
angle[0] -= 360.0
slider_shoulder.SetValue(angle[0]) if(key == "Down"):
assembly.RotateY(dt)
angle[0] -= dt
if angle[0] < 0.0:
angle[0] += 360.0
slider_shoulder.SetValue(angle[0]) # Ask each renderer owned by this RenderWindow to render its image and synchronize this process
renWin.Render()
return def LoadSTL(filename):
reader = vtk.vtkSTLReader()
reader.SetFileName(filename)
mapper = vtk.vtkPolyDataMapper() # maps polygonal data to graphics primitives
mapper.SetInputConnection(reader.GetOutputPort())
actor = vtk.vtkLODActor()
actor.SetMapper(mapper)
return actor # represents an entity in a rendered scene def CreateCoordinates():
# create coordinate axes in the render window
axes = vtk.vtkAxesActor()
axes.SetTotalLength(100, 100, 100) # Set the total length of the axes in 3 dimensions # Set the type of the shaft to a cylinder:0, line:1, or user defined geometry.
axes.SetShaftType(0) axes.SetCylinderRadius(0.02)
axes.GetXAxisCaptionActor2D().SetWidth(0.03)
axes.GetYAxisCaptionActor2D().SetWidth(0.03)
axes.GetZAxisCaptionActor2D().SetWidth(0.03)
#axes.SetAxisLabels(0) # Enable:1/disable:0 drawing the axis labels
#transform = vtk.vtkTransform()
#transform.Translate(0.0, 0.0, 0.0)
#axes.SetUserTransform(transform)
#axes.GetXAxisCaptionActor2D().GetCaptionTextProperty().SetColor(1,0,0)
#axes.GetXAxisCaptionActor2D().GetCaptionTextProperty().BoldOff() # disable text bolding
return axes def ShoulderSliderCallback(obj,event):
sliderRepres = obj.GetRepresentation()
pos = sliderRepres.GetValue()
assembly.SetOrientation(0,-pos,0) renWin.Render() def ElbowSliderCallback(obj,event):
sliderRepres = obj.GetRepresentation()
pos = sliderRepres.GetValue()
actor[1].SetOrientation(0,-pos,0) renWin.Render() def ConfigSlider(sliderRep, TitleText, Yaxes):
sliderRep.SetMinimumValue(0.0)
sliderRep.SetMaximumValue(360.0)
sliderRep.SetValue(0.0) # Specify the current value for the widget
sliderRep.SetTitleText(TitleText) # Specify the label text for this widget sliderRep.GetSliderProperty().SetColor(1,0,0) # Change the color of the knob that slides
sliderRep.GetSelectedProperty().SetColor(0,0,1) # Change the color of the knob when the mouse is held on it
sliderRep.GetTubeProperty().SetColor(1,1,0) # Change the color of the bar
sliderRep.GetCapProperty().SetColor(0,1,1) # Change the color of the ends of the bar
#sliderRep.GetTitleProperty().SetColor(1,0,0) # Change the color of the text displaying the value # Position the first end point of the slider
sliderRep.GetPoint1Coordinate().SetCoordinateSystemToDisplay()
sliderRep.GetPoint1Coordinate().SetValue(50, Yaxes) # Position the second end point of the slider
sliderRep.GetPoint2Coordinate().SetCoordinateSystemToDisplay()
sliderRep.GetPoint2Coordinate().SetValue(400, Yaxes) sliderRep.SetSliderLength(0.02) # Specify the length of the slider shape.The slider length by default is 0.05
sliderRep.SetSliderWidth(0.02) # Set the width of the slider in the directions orthogonal to the slider axis
sliderRep.SetTubeWidth(0.005)
sliderRep.SetEndCapWidth(0.03) sliderRep.ShowSliderLabelOn() # display the slider text label
sliderRep.SetLabelFormat("%.1f") sliderWidget = vtk.vtkSliderWidget()
sliderWidget.SetRepresentation(sliderRep)
sliderWidget.SetAnimationModeToAnimate() return sliderWidget def CreateGround():
# create plane source
plane = vtk.vtkPlaneSource()
plane.SetXResolution(50)
plane.SetYResolution(50)
plane.SetCenter(0,0,0)
plane.SetNormal(0,0,1) # mapper
mapper = vtk.vtkPolyDataMapper()
mapper.SetInputConnection(plane.GetOutputPort()) # actor
actor = vtk.vtkActor()
actor.SetMapper(mapper)
actor.GetProperty().SetRepresentationToWireframe()
#actor.GetProperty().SetOpacity(0.4) # 1.0 is totally opaque and 0.0 is completely transparent
actor.GetProperty().SetColor(light_grey) '''
# Load in the texture map. A texture is any unsigned char image.
bmpReader = vtk.vtkBMPReader()
bmpReader.SetFileName("ground_texture.bmp")
texture = vtk.vtkTexture()
texture.SetInputConnection(bmpReader.GetOutputPort())
texture.InterpolateOn()
actor.SetTexture(texture)
'''
transform = vtk.vtkTransform()
transform.Scale(2000,2000, 1)
actor.SetUserTransform(transform) return actor def CreateScene():
# Create a rendering window and renderer
ren = vtk.vtkRenderer()
#renWin = vtk.vtkRenderWindow()
renWin.AddRenderer(ren) # Create a renderwindowinteractor
iren = vtk.vtkRenderWindowInteractor()
iren.SetRenderWindow(renWin)
style = MyInteractor()
style.SetDefaultRenderer(ren)
iren.SetInteractorStyle(style) for id, file in enumerate(filenames):
actor.append(LoadSTL(file))
#actor[id].GetProperty().SetColor(blue)
r = vtk.vtkMath.Random(.4, 1.0)
g = vtk.vtkMath.Random(.4, 1.0)
b = vtk.vtkMath.Random(.4, 1.0)
actor[id].GetProperty().SetDiffuseColor(r, g, b)
actor[id].GetProperty().SetDiffuse(.8)
actor[id].GetProperty().SetSpecular(.5)
actor[id].GetProperty().SetSpecularColor(1.0,1.0,1.0)
actor[id].GetProperty().SetSpecularPower(30.0) assembly.AddPart(actor[id]) # Add the actors to the scene
#ren.AddActor(actor[id]) # Also set the origin, position and orientation of assembly in space.
assembly.SetOrigin(0, 0, 0) # This is the point about which all rotations take place
#assembly.AddPosition(0, 0, 0)
#assembly.RotateX(45) actor[1].SetOrigin(274, 0, 0) # initial elbow joint position ren.AddActor(assembly) # Add coordinates
axes = CreateCoordinates()
ren.AddActor(axes) # Add ground
ground = CreateGround()
ren.AddActor(ground) # Add slider to control the robot
sliderWidget_shoulder = ConfigSlider(slider_shoulder,"Shoulder Joint", 80)
sliderWidget_shoulder.SetInteractor(iren)
sliderWidget_shoulder.EnabledOn()
sliderWidget_shoulder.AddObserver("InteractionEvent", ShoulderSliderCallback) sliderWidget_elbow = ConfigSlider(slider_elbow,"Elbow Joint", 160)
sliderWidget_elbow.SetInteractor(iren)
sliderWidget_elbow.EnabledOn()
sliderWidget_elbow.AddObserver("InteractionEvent", ElbowSliderCallback) # Set background color
ren.SetBackground(.2, .2, .2) # Set window size
renWin.SetSize(600, 600) # Set up the camera to get a particular view of the scene
camera = vtk.vtkCamera()
camera.SetFocalPoint(300, 0, 0)
camera.SetPosition(300, -400, 350)
camera.ComputeViewPlaneNormal()
camera.SetViewUp(0, 1, 0)
camera.Zoom(0.4)
ren.SetActiveCamera(camera) # Enable user interface interactor
iren.Initialize()
iren.Start() if __name__ == "__main__":
CreateScene()
下面是使用MFC搭建的机器人上位机监控平台,可以实现上述的一些基本功能。这个GIF动画使用开源软件ScreenToGif生成,非常好用!
参考 :
VTK/Examples/Cxx/PolyData/TransformPipeline
VTK/Examples/Cxx/Visualization/DisplayCoordinateAxes
VTK/Examples/Cxx/GeometricObjects/Axes
Using VTK to Visualize Scientific Data (online tutorial)
VTK/Tutorials/InteractorStyleSubclass
使用VTK与Python实现机械臂三维模型可视化的更多相关文章
- ROS机械臂 Movelt 学习笔记4 | Move Group 接口 Python
Python 的使用总是比 C++ 简单许多,Move Group 的 Python 接口更为便捷,也为使用者提供了很多用于操纵机器人和机械臂的函数,能够和 C++ 接口实现相同的功能: 设置机械臂的 ...
- UR机械臂运动学正逆解方法
最近几个月因为工作接触到了机械臂的项目,突然对机械臂运动方法产生了兴趣,也就是如何控制机械臂的位置和姿态.借用一张网上的图片,应该是ur5的尺寸.我用到的是ur3机械臂,除了尺寸不一样,各关节结构和初 ...
- 基于 Mathematica 的机器人仿真环境(机械臂篇)[转]
完美的教程,没有之一,收藏学习. 目的 本文手把手教你在 Mathematica 软件中搭建机器人的仿真环境,具体包括以下内容(所使用的版本是 Mathematica 11.1,更早的版本可能缺少某些 ...
- ros平台下python脚本控制机械臂运动
在使用moveit_setup_assistant生成机械臂的配置文件后可以使用roslaunch demo.launch启动demo,在rviz中可以通过拖动机械臂进行运动学正逆解/轨迹规划等仿真运 ...
- ROS机械臂 Movelt 学习笔记3 | kinect360相机(v1)相关配置
目标是做一个机械臂视觉抓取的demo,在基地里翻箱倒柜,没有找到学长所说的 d435,倒是找到了一个老古董 kinect 360. 前几天就已经在旧电脑上配置好了,现在记录在新电脑上的配置过程. 1. ...
- ROS机械臂 Movelt 学习笔记5 | MoveIt Commander Scripting
前一讲python接口中提到moveit_commander 包.这个包提供了用于运动规划.笛卡尔路径计算以及拾取和放置的接口. moveit_commander 包还包括一个命令行接口程序movei ...
- 【BZOJ3506】排序机械臂(Splay)
[BZOJ3506]排序机械臂(Splay) 题面 神TMBZOJ没有题面,感谢SYC的题面 洛谷的题面也不错 题解 对于每次旋转的物体 显然可以预处理出来 现在只要模拟旋转操作就行了 至于在哪里放标 ...
- ROS连接ABB机械臂调试详细教程-ROS(indigo)和ABB RobotStudio 6.03.02-
在ROS industrial介绍中,给出了ROS和常用机械臂的连接方式.具体信息可以参考:http://wiki.ros.org/Industrial ROS连接ABB机械臂调试详细教程-ROS(i ...
- 机械臂——arduino、marlin固件、printrun软件【转】
最近了解到,在市面上大多数机械臂控制都采用的arduino这个开源硬件来控制的,而我发现既然会单片机,就没有必要采用arduino来控制了,arduino只是一种为了简化编程而开发一种软硬件控制平台, ...
随机推荐
- 如何在windows2003(IIS6)下配置IIS,使其支持cshtml
在开发环境机器上,安装WEB PAGES 后,会在 C:\Program Files (x86)\Microsoft ASP.NET\ASP.NET Web Pages 的下产生DLL 其中 Micr ...
- Reloading Java Classes 201: How do ClassLoader leaks happen? Translation
The original link : http://zeroturnaround.com/rebellabs/rjc201/ From ClassLoaders to Classes 从ClassL ...
- ASP.NET Core 中间件 中间件(Middleware)和过滤器(Filter)的区别
https://www.cnblogs.com/savorboard/p/5586229.html 前言 在上篇文章主要介绍了DotNetCore项目状况,本篇文章是我们在开发自己的项目中实际使用的, ...
- Unreal Engine 4 减少编辑器的帧率
默认的,打开UE4的编辑器,显卡会以全速渲染场景,在我的机器上.是120FPS. 整个机器就開始轰鸣了.资源占用太凶了.事实上全然不是必需这样,帧率在60左右就足够了. 那怎么改动呢,试了非常多办法. ...
- JavaScript:Date 对象
ylbtech-JavaScript:Date 对象 1.返回顶部 Date 对象 Date 对象用于处理日期和时间. 创建 Date 对象的语法: var myDate=new Date() 注释: ...
- STM32中基于DMA的ADC采样实例之MQ-2烟雾传感器
最近学习了一下STM32中的ADC采样,由于手头正好有一个MQ-2的烟雾传感器,所以正好可以测试一把.体验ADC采样的过程.下面介绍一下这个MQ-2烟雾传感器. 1.MQ-2烟雾传感器简介 MQ-2气 ...
- [leetcode]Simplify Path @ Python
原题地址:https://oj.leetcode.com/problems/simplify-path/ 题意: Given an absolute path for a file (Unix-sty ...
- 如何在Windows版的ScaleIO的节点中添加磁盘
嗯, 为什么会有这个问题呢? 因为我要安装ScaleIO 1.32, 在使用Installation manager完成初始安装之后, 需要将一些磁盘添加到ScaleIO的storage pool中. ...
- Mahout 安装配置
http://log.medcl.net/item/2011/02/mahout_install/ Apache Mahout是一个机器学习的框架,构建在hadoop上支持大规模数据集的处理,目前最新 ...
- Flask莫名其妙特别慢
其他上网都正常,代理服务器.防火墙反复检查都没问题,最后,严重怀疑腾讯的mysql服务器,监控是这样的: 突然下降那段就很不正常. 后面忽然就崩溃了,死活都连不上.把可疑连接都关闭了,把防火墙都关闭了 ...