OpenCV---模板匹配matchTemplate
作用有局限性,必须在指定的环境下,才能匹配成功,是受到很多因素的影响,所以有一定的适应性
模板匹配是一种最原始、最基本的模式识别方法,研究某一特定对象物的图案位于图像的什么地方,进而识别对象物,这就是一个匹配问题。
它是图像处理中最基本、最常用的匹配方法。
模板匹配具有自身的局限性,主要表现在它只能进行平行移动,若原图像中的匹配目标发生旋转或大小变化,该算法无效。
模板匹配就是在整个图像区域发现与给定子图像匹配的小块区域
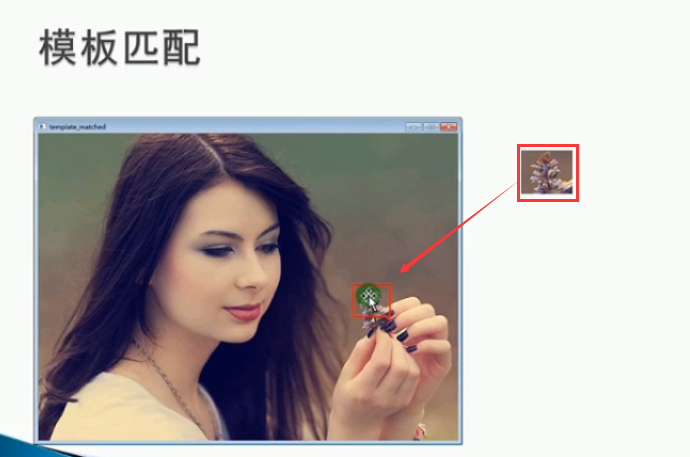
工作原理:在待检测图像上,从左到右,从上向下计算模板图像与重叠子图像的匹配度,匹配程度越大,两者相同的可能性越大。
代码实现:
import cv2 as cv
import numpy as np def template_demo():
tpl = cv.imread("./temp.png")
target = cv.imread("./1.png")
cv.imshow("template image",tpl)
cv.imshow("target image",target)
methods = [cv.TM_SQDIFF_NORMED,cv.TM_CCORR_NORMED,cv.TM_CCOEFF_NORMED] #各种匹配算法
th,tw = tpl.shape[:2] #获取模板图像的高宽
for md in methods:
result = cv.matchTemplate(target,tpl,md)
# result是我们各种算法下匹配后的图像
# cv.imshow("%s"%md,result)
#获取的是每种公式中计算出来的值,每个像素点都对应一个值
min_val,max_val,min_loc,max_loc = cv.minMaxLoc(result)
if md == cv.TM_SQDIFF_NORMED:
tl = min_loc #tl是左上角点
else:
tl = max_loc
br = (tl[]+tw,tl[]+th) #右下点
cv.rectangle(target,tl,br,(,,),) #画矩形
cv.imshow("match-%s"%md,target) src = cv.imread("./1.png") #读取图片
cv.namedWindow("input image",cv.WINDOW_AUTOSIZE) #创建GUI窗口,形式为自适应
cv.imshow("input image",src) #通过名字将图像和窗口联系
template_demo()
cv.waitKey() #等待用户操作,里面等待参数是毫秒,我们填写0,代表是永远,等待用户操作
cv.destroyAllWindows() #销毁所有窗口
补充:
1.几种常见的模板匹配算法
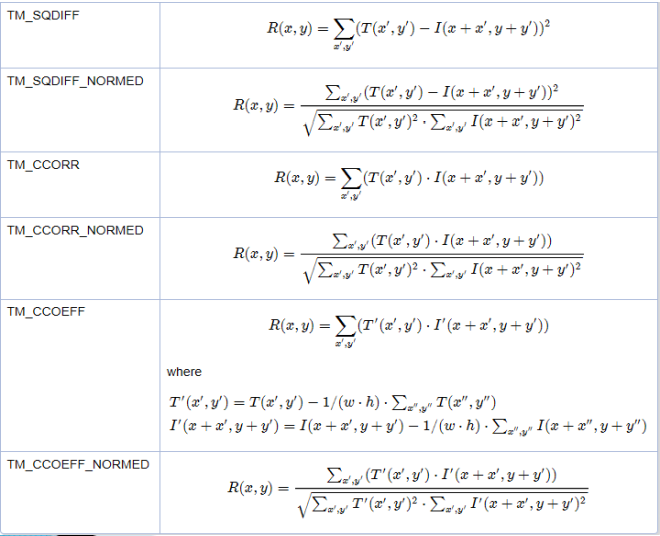
①TM_SQDIFF是平方差匹配;TM_SQDIFF_NORMED是标准平方差匹配。利用平方差来进行匹配,最好匹配为0.匹配越差,匹配值越大。 ②TM_CCORR是相关性匹配;TM_CCORR_NORMED是标准相关性匹配。采用模板和图像间的乘法操作,数越大表示匹配程度较高, 0表示最坏的匹配效果。 ③TM_CCOEFF是相关性系数匹配;TM_CCOEFF_NORMED是标准相关性系数匹配。将模版对其均值的相对值与图像对其均值的相关值进行匹配,1表示完美匹配,-1表示糟糕的匹配,0表示没有任何相关性(随机序列)。 总结:随着从简单的测量(平方差)到更复杂的测量(相关系数),我们可获得越来越准确的匹配(同时也意味着越来越大的计算代价)。
相关性是越接近1越大越好
平方差是越小越好
所以TM_SQDIFF在使用时和其他的是有所区别的
2.result = cv.matchTemplate(target,tpl,md)
opencv的目标匹配函数为matchTemplate,函数原型为:matchTemplate(image, templ, method[, result[, mask]]) -> result
image参数表示待搜索源图像,必须是8位整数或32位浮点。
templ参数表示模板图像,必须不大于源图像并具有相同的数据类型。
method参数表示计算匹配程度的方法。
result参数表示匹配结果图像,必须是单通道32位浮点。如果image的尺寸为W x H,templ的尺寸为w x h,则result的尺寸为(W-w+)x(H-h+)。
其中result是模板图像去匹配的区域位置图像

3.min_val,max_val,min_loc,max_loc = cv.minMaxLoc(result)
opencv的函数minMaxLoc:在给定的矩阵中寻找最大和最小值,并给出它们的位置。 该功能不适用于多通道阵列。 如果您需要在所有通道中查找最小或最大元素,要先将阵列重新解释为单通道。
函数minMaxLoc原型为:minMaxLoc(src[, mask]) -> minVal, maxVal, minLoc, maxLoc
src参数表示输入单通道图像。
mask参数表示用于选择子数组的可选掩码。
minVal参数表示返回的最小值,如果不需要,则使用NULL。
maxVal参数表示返回的最大值,如果不需要,则使用NULL。
minLoc参数表示返回的最小位置的指针(在2D情况下); 如果不需要,则使用NULL。
maxLoc参数表示返回的最大位置的指针(在2D情况下); 如果不需要,则使用NULL。
结合每种匹配算法,我们看看获取的数值
result = cv.matchTemplate(target,tpl,md)
#获取的是每种公式中计算出来的值,每个像素点都对应一个值
min_val,max_val,min_loc,max_loc = cv.minMaxLoc(result)
print("--------------%s--------------"%md)
print("min_val",min_val)
print("max_val",max_val)
print("min_loc",min_loc)
print("max_loc",max_loc)
print("--------------%s--------------" % md)
---------------------------- #TM_SQDIFF_NORMED标准平方差匹配
min_val 0.0 #标准差是越小为0代表匹配上了
max_val 0.22279763221740723
min_loc (108, 248)
max_loc (3, 480)
----------------------------
---------------------------- #TM_CCORR_NORMED标准相关性匹配
min_val 0.9228140115737915
max_val 1.0 #相关性是越接近1代表匹配上了
min_loc (, )
max_loc (108, 248)
----------------------------
---------------------------- #TM_CCOEFF_NORMED标准相关性系数匹配
min_val -0.10706906020641327
max_val 1.0 #相关性越接近1越好
min_loc (, )
max_loc (108, 248)
----------------------------
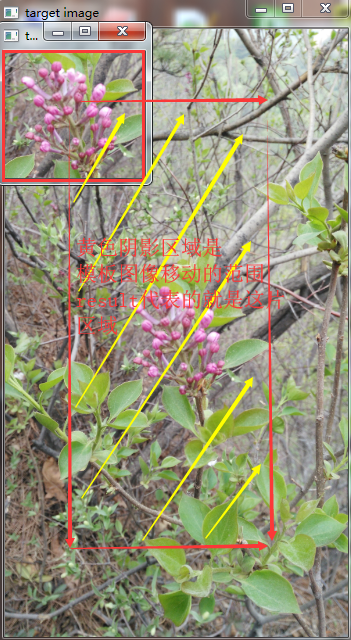
查看min_loc和max_loc关系
cv.line(target,min_loc,max_loc,(,,),)

OpenCV---模板匹配matchTemplate的更多相关文章
- Atitit opencv模板匹配attilax总结
Atitit opencv模板匹配attilax总结 找一幅图像的匹配的模板,可以在一段视频里寻找出我们感兴趣的东西,比如条形码的识别就可能需要这样类似的一个工作提取出条形码区域(当然这样的方法并不鲁 ...
- Atitit opencv 模板匹配
Atitit opencv 模板匹配 1.1. 图片1 1.2. Atitit opencv 模板匹配 6中匹配算法貌似效果区别不大1 1.3. 对模板缩放的影响 一般的缩放可以,太大了就歇菜了.. ...
- OpenCV模板匹配函数matchTemplate详解
参考文档:http://www.opencv.org.cn/opencvdoc/2.3.2/html/doc/tutorials/imgproc/histograms/template_matchin ...
- OpenCV——模板匹配
minMaxLoc函数: void minMaxLoc( const Mat& src, double* minVal, double* maxVal=0, Point* minLoc=0, ...
- opencv::模板匹配(Template Match)
模板匹配介绍 模板匹配就是在整个图像区域发现与给定子图像匹配的小块区域. 所以模板匹配首先需要一个模板图像T(给定的子图像) 另外需要一个待检测的图像-源图像S 工作方法,在带检测图像上,从左到右,从 ...
- opencv 模板匹配与滑动窗口(单匹配) (多匹配)
1单匹配: 测试图片: code: #include <opencv\cv.h> #include <opencv\highgui.h> #include <open ...
- opencv模板匹配查找图像(python)
#!/usr/bin/env python3 # -*- coding: utf-8 -*- import cv2 import numpy as np from cv2 import COLOR_B ...
- 关于opencv模板匹配功能的项目测试记录
模板匹配功能介绍的很好的一篇博客:https://www.cnblogs.com/XJT2018/p/9934139.html 就如上述博客所言:“若原图像中的匹配目标发生旋转或大小变化,该算法无效. ...
- opencv 模板匹配, 已解决模板过大程序不工作的bug
#include <opencv2/opencv.hpp> #include <opencv2/highgui/highgui.hpp> #include <opencv ...
- opencv模板匹配有趣的链接
https://docs.opencv.org/3.0-beta/doc/py_tutorials/py_imgproc/py_template_matching/py_template_matchi ...
随机推荐
- openresty 安装指南
对于一些常见的 Linux 发行版本,OpenResty 提供 官方预编译包.确保你首先用这种方式来安装. 如果您还没有下载 OpenResty 的源码包, 请到 Download 页下载. 首先,您 ...
- Scrum立会报告+燃尽图(十一月十四日总第二十二次):分配β阶段任务
此作业要求参见:https://edu.cnblogs.com/campus/nenu/2018fall/homework/2284 项目地址:https://git.coding.net/zhang ...
- "Hello World"团队召开的第三周第七次会议
今天是我们团队“Hello World!”团队召开的第三周的第七次会议.博客内容: 一.会议时间 二.会议地点 三.会议成员 四.会议内容 五.Todo List 六.会议照片 七.燃尽图 一.会议时 ...
- c# webBrowser清除缓存问题
1.webBrowser的浏览器为ie. 2.通过清除ie缓存即可. 3.代码调用如下: public enum ShowCommands : int { SW_HIDE = , SW_SHOWNOR ...
- RIGHT-BICEP测试第二次程序
根据Right-BICEP单元测试的方法我对我写的第二次程序进行了测试: 测试一:测试能否控制使用乘除 测试二:测试是否能加括号 测试三:是否可以控制题目输出数量 测试四:能否控制输出方式,选择文件输 ...
- “我爱淘”第二冲刺阶段Scrum站立会议6
完成任务: 完成学院分类的点击查看书籍功能,可以点击书的条目查看书的详细信息. 计划任务: 将书的详细信息进行完善,并且可以点击收藏以及已预订等功能. 遇到问题: 分类功能,根据不同学院,自动将数据库 ...
- QtCharts模块在QtWideget中图表绘制(非QML)
版权声明:若无来源注明,Techie亮博客文章均为原创. 转载请以链接形式标明本文标题和地址: 本文标题:QtCharts模块在QtWideget中图表绘制(非QML) 本文地址:http:/ ...
- 【week10】规格说明书练习-吉林市1日游
假设我们全班同学及教师去吉林省吉林市1日游,请为这次活动给出规格说明书. 版本:1.0 编订:于淼 团队:2016级计算机技术全体同学 日期:2016/11/19 1.引言 1.1 编写目的 1.2 ...
- PAT L1 - 056 猜数字
https://pintia.cn/problem-sets/994805046380707840/problems/994805074646122496 一群人坐在一起,每人猜一个 100 以内的数 ...
- 增加响应header让ajax支持跨域
ajax请求数据步骤 发送请求--->浏览器接受响应--->判断是否是同域下 是的话,就把响应数据返回给ajax.不是的话就提醒禁止跨域请求. 现在可以在响应头重增加 header(&qu ...