【论文阅读】Trajectory-guided Control Prediction for End-to-end Autonomous Driving: A Simple yet Strong Baseline
参考与前言
Summary: leaderboard 现存第一名 TCP,非常simple的设置 取得了很好的效果
论文链接:Trajectory-guided Control Prediction for End-to-end Autonomous Driving: A Simple yet Strong Baseline
代码链接:https://github.com/OpenPerceptionX/TCP 作者回复预计9月开
jg刷到的时候 我旁边看了一眼 这些框架图为什么这么熟… 后面仔细看才发现喔 吸取各家之长处了 简单传感器的高分 真绝啊
1. Motivation
对于端到端的驾驶任务,一般是从预测出轨迹,然后用控制器跟随;另一种则是直接预测controller输出;由两种方法启发,作者时候:可以吸取各自优点,然后提出本文方法
Contribution
- 调研尝试了两种方法,然后提出了结合的pipeline
- multi-step control 预测使得 temporal reasoning
- CARLA排行榜第一名 (排名榜查看时间June 25, 2022 )
2. Method
专家使用的是Roach 【用RL训练出的一种专家策略】,这里 小声提一句 我收集了一下现有开源的专家【Roach, SEED, AUTO, MMFN】,然后给了一个repo carla-expert 来给大家做收集用… 感兴趣可以去点个star;如果后面你想做这个任务 肯定是可以用上的,毕竟第一次做任务的时候 我一个月都在搞数据那一环
原来e2e也可以写公式 涨见识,大概就是学到的策略和专家数据的loss 在整个数据集\(\mathrm{D}=\{(x,a^*)\}\)下 取最小的
\]
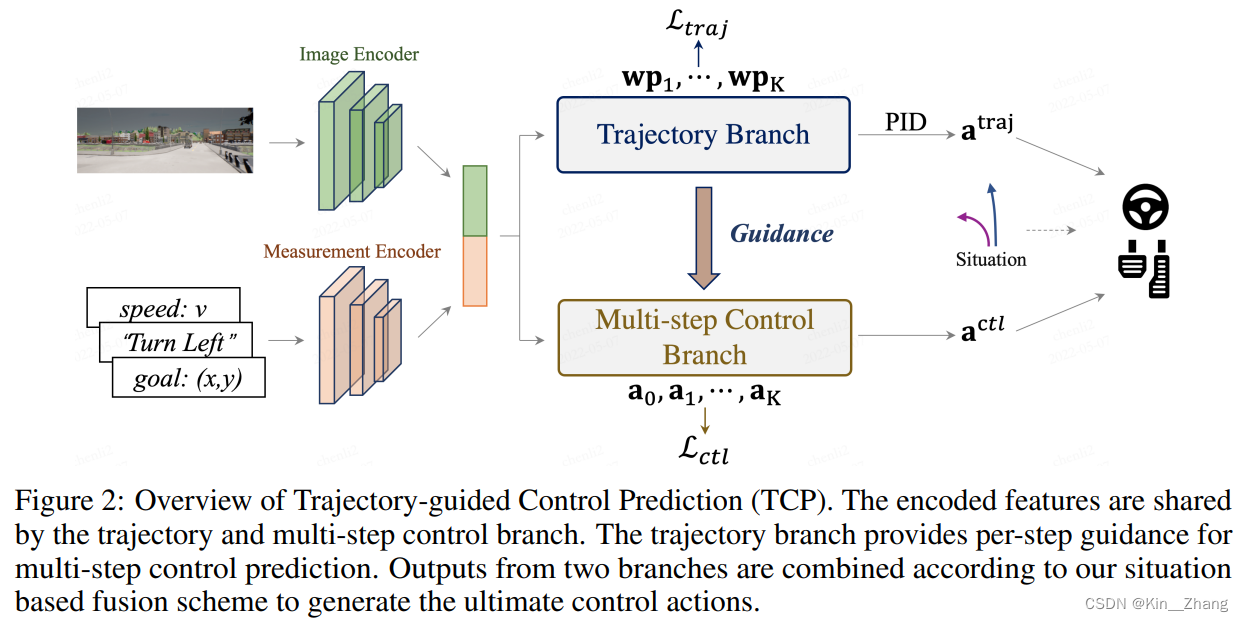
2.1 框架
- 整体前面encoder框架 可以对比着CILRS
- Loss设计可以看看Roach一文
输入:一帧图片;当前帧的速度,high command,目标点等
网络细节,在附录和正文里有简洁的说明:
- 相机尺寸是900x256,FOV直接拉满为100
- K = 4 也就是选未来四步steps 的动作/轨迹进入
- Image Encoder 使用的是有预训练的 ResNet-34
- measurement encoder则是一个MLP [全文并未仔细说明具体几层;暂且认为和CILRS一致设置 也就是 根据输入的num 对应相应数量的linear到encoder里] → 128
- 各自encoder的输出 concat到一起 组成 \(\bf{j}^{traj}\) → 256
接下来 两个branch都直接取共同输出的feature进入各自的分支
那… loss怎么backpropagate?
见loss 部分, 各自loss 相加,直接.backward()
2.2 Trajectory Branch
和[16]一样将 \(\bf{j}^{traj}\) 送到GRU里,应该是和transfuser的操作一样,大概是下图这个感觉:
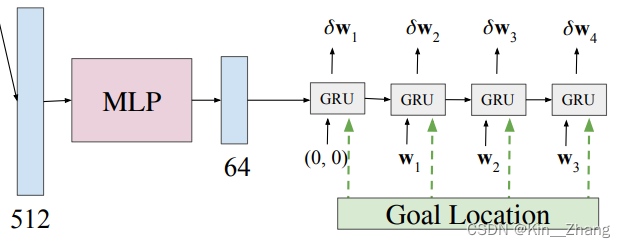
摘自 transfuser 一文
其中 因为有 experts的真值 (x,y) 轨迹点作为参考,所以可以算loss
注意看整体框架图,其中得到这些轨迹点后,使用的是两个横纵向PID进行轨迹到控制量的传递,不同于之前的方法,这里的PID控的是横纵向error,大部分以前方法基本都是一个速度控制(给定一个速度),一个转向控制为主
2.3 Multi-Step Control Branch
这里提出了一个比较重要的点:之前这种 基于当前的输入 预测下一个输出,整体输出都是独立同分布假设。但实际上 当前输入与历史输入,和未来输出之间并不是独立的。 对比与用MDP(马尔科夫决策过程)和RL进行回溯/往前,提出了一种更为简单的方式
首先单看主框架图里对应的淡黄色模块,
temporal module输入是 \(\mathbf{j}_{\mathrm{t}}^{\text {ctl }}\) 和 \(\mathbf a_t^{ctl}\) concat后的,其中:
\]
其中\(\bf w_t\)是由t时刻的 hidden state concat在一起的,如下图公式:
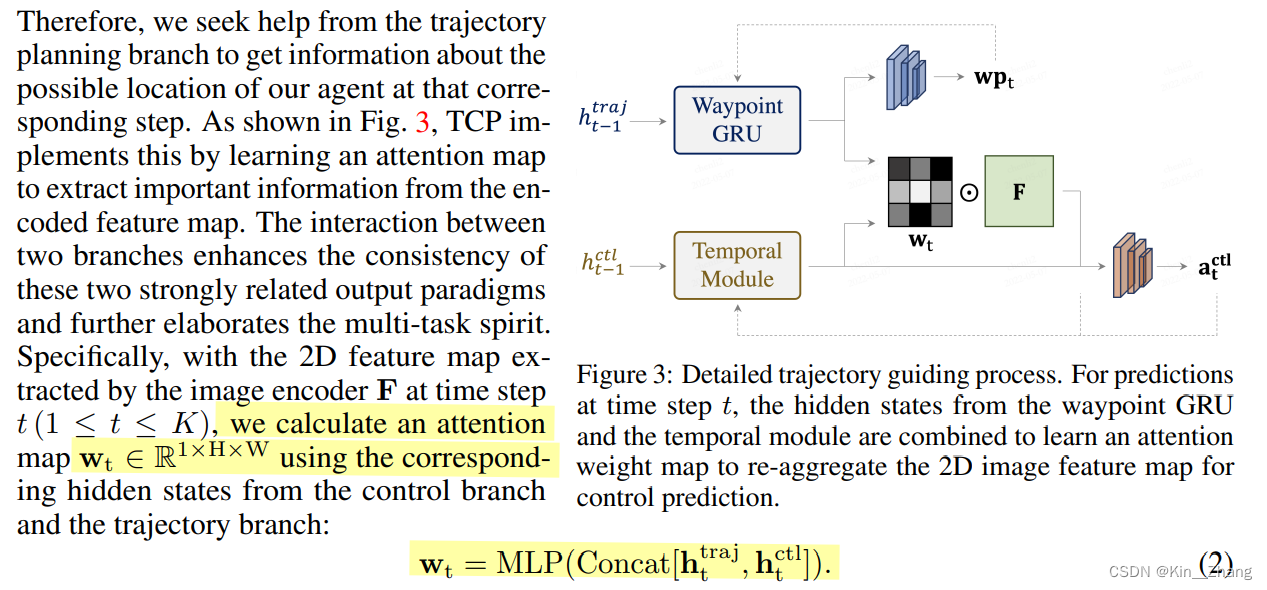
而\(\mathbf h_t^{traj}, \mathbf h_t^{ctl}\)是从各自的Trajectory Branch和Control Branch而来
问题区:
但是这里有点疑惑的是 branch内部哪一部分的hidden state?
图三中两个模块都是GRU实现的,hidden state从每个GRU里得到
Trajectory是GRU 可能是t下GRU,所以K是代表有几个GRU模块?
是的
但Control branch是啥网络 MLP?那是哪一层的hidden state呢?
是MLP hidden state都是各自GRU里来的,图三中输出前的两个均为MLP
2.4 Loss 设计
主要为三种,轨迹、控制和附加loss
对于轨迹:
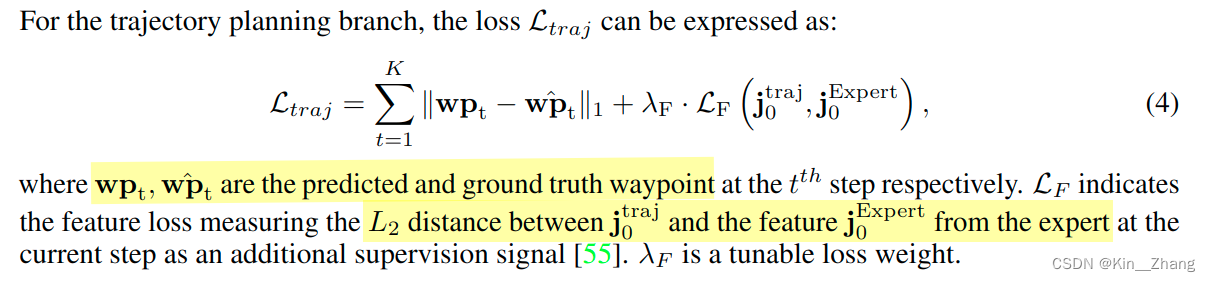
其中与transfuser不同的是加入了feature的loss进来,j是128维度的
对于控制:
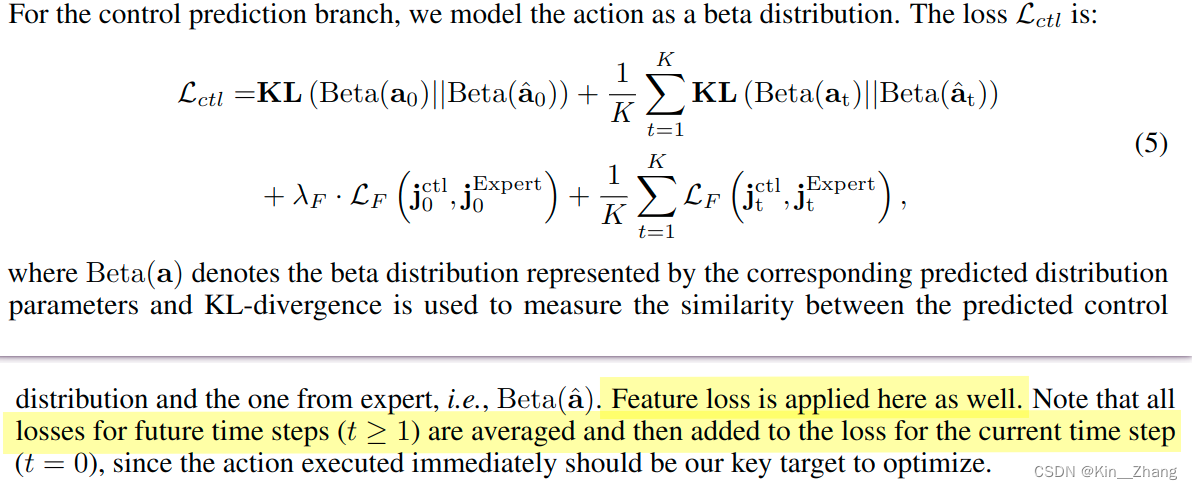
对于附加,从image feature 加了速度预测head L1 loss 和一个value predict 预测expected return 同[55]一样,L2 Loss
然后三个loss 相加:
\]
问题区:
咦 feature… 怎么做loss,expert的feature不也是同一个网络输出的嘛 可以这样玩?
roach 做法,由BEV下的gt 做的不同的输入,但是不知道是直接收集的expert的feature还是说用BEV输入到这个网络做的loss
- 可能得去瞅瞅 roach的 loss玩法
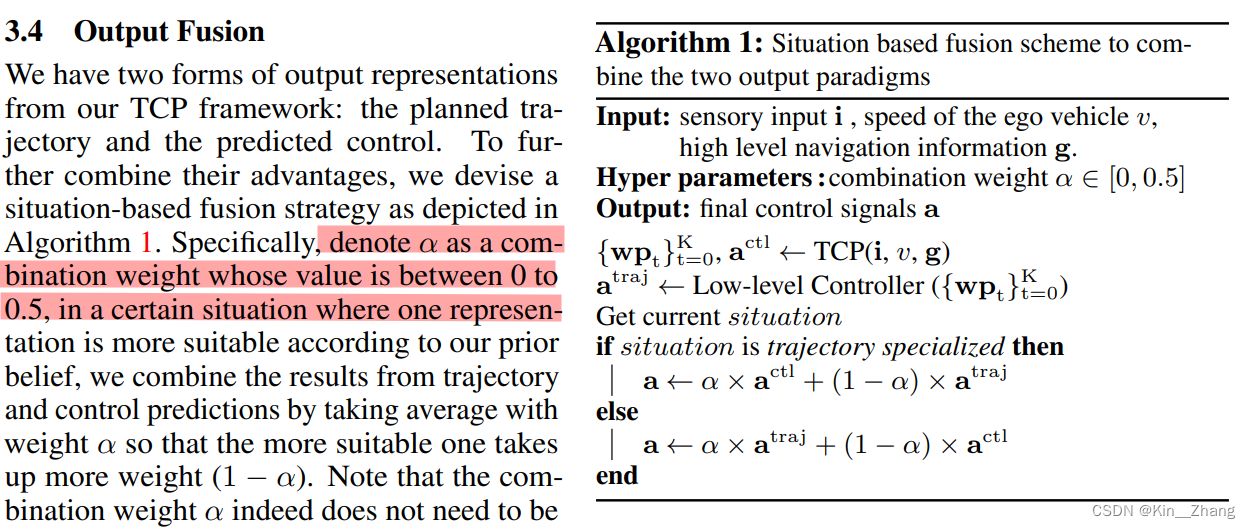
2.5 Fusion Approach
融合的方法也挺工程的,直接判断 过去1s内的steer 绝对值相加 是否超过0.1,如果超过则认为你正在执行转弯,就切换到 以轨迹分支为主;否则以多步控制分支为主
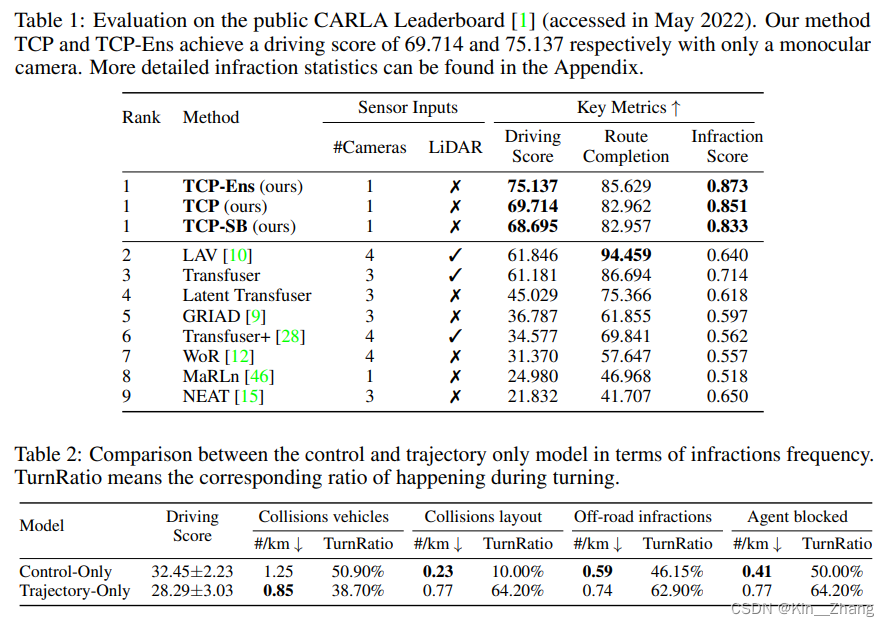
3. 实验及结果
实验和结果 个人觉得作者有点省事了… 因为直接抽的leaderboard,但是!CARLA排行榜不同于其他的地方是:数据集是你自己创建的,一般情况下,大家都会多多少少去用自己的数据集训练出来其他方法的agent 在同一个expert training下的对比… 【大概意思呢就是:实验条件并不一致,虽然从线上来说你是好的 但是可能其他人只用了你1/2的数据…】
不过 这并不能说明方法不有效,毕竟 这可是一个相机能干到的分数啊,我深表佩服!以下仅仅是截图一下各个实验表格和可视化的,因为太熟悉这个任务了 就不再说明了,感兴趣 想尝试一下榜的可以看看 相关CARLA leaderbaord配置教学文章 其中包含了指标说明
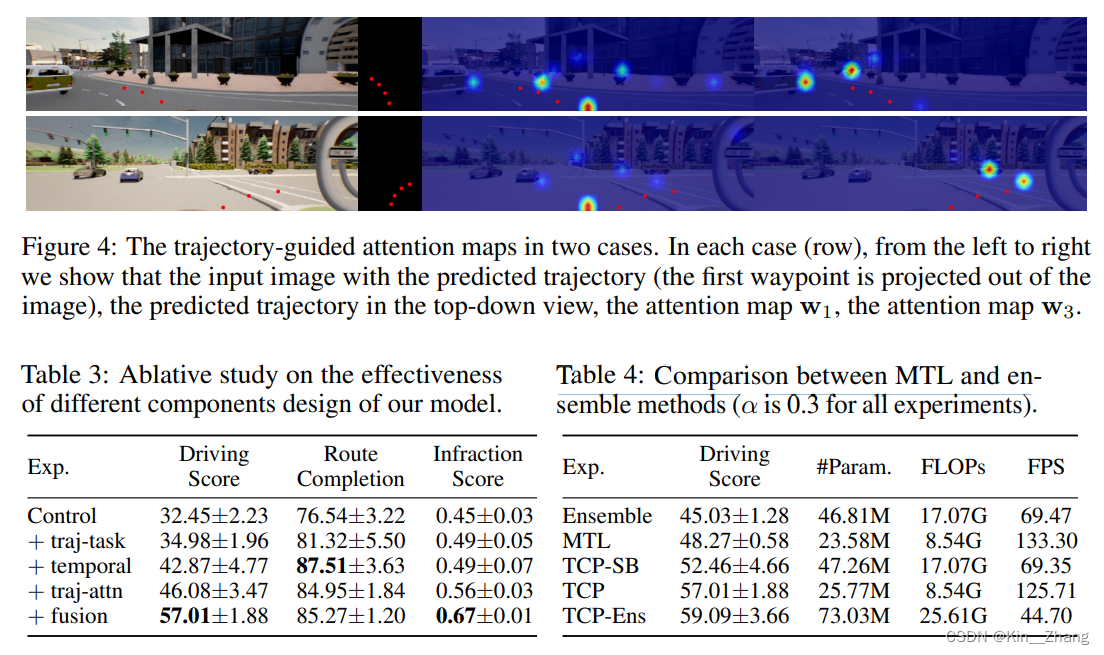
一些在自己方法下 控制变量的 消融实验
碎碎念
此部分碎碎念 有些在前面实验中念完了 hhhh 来自jg的碎碎念:对CARLA leaderboard的完全过拟合 hhhh 毕竟这种方法是真的不会在车上尝试的吧… LAV的方法至少有条件是可以在实车上测一波,从可解释性上会强很多 比如 找原因啥的,但是LAV真的太太太大了,这个方法 第一次成绩匿名的时候 我觉得不可能.. 还自己quick setting了一波一个相机的实验 但是效果并不好 (当时TCP文章还没挂出来哈)… 所以后面看看有没有机会 看文章简单复现一下
PS 现在大家的数据集 真是一个比一个高,自己当时做的时候 100K帧数据都不到… LAV 390K,TCP 420K,现在想来 好像知道自己分数为啥差距这么大了 也是一个到后面有点玩不懂的任务,不过planning也就这一个任务… 榜单可以刷刷
赠人点赞 手有余香 ;正向回馈 才能更好开放记录 hhh
【论文阅读】Trajectory-guided Control Prediction for End-to-end Autonomous Driving: A Simple yet Strong Baseline的更多相关文章
- 论文阅读 | Region Proposal by Guided Anchoring
论文阅读 | Region Proposal by Guided Anchoring 相关链接 论文地址:https://arxiv.org/abs/1901.03278 概述 众所周知,anchor ...
- 【论文阅读】Motion Planning through policy search
想着CSDN还是不适合做论文类的笔记,那里就当做技术/系统笔记区,博客园就专心搞看论文的笔记和一些想法好了,[]以后中框号中间的都算作是自己的内心OS 有时候可能是问题,有时候可能是自问自答,毕竟是笔 ...
- 论文阅读笔记六:FCN:Fully Convolutional Networks for Semantic Segmentation(CVPR2015)
今天来看一看一个比较经典的语义分割网络,那就是FCN,全称如题,原英文论文网址:https://people.eecs.berkeley.edu/~jonlong/long_shelhamer_fcn ...
- [置顶]
人工智能(深度学习)加速芯片论文阅读笔记 (已添加ISSCC17,FPGA17...ISCA17...)
这是一个导读,可以快速找到我记录的关于人工智能(深度学习)加速芯片论文阅读笔记. ISSCC 2017 Session14 Deep Learning Processors: ISSCC 2017关于 ...
- 论文阅读 | FoveaBox: Beyond Anchor-based Object Detector
论文阅读——FoveaBox: Beyond Anchor-based Object Detector 概述 这是一篇ArXiv 2019的文章,作者提出了一种新的anchor-free的目标检测框架 ...
- YOLO 论文阅读
YOLO(You Only Look Once)是一个流行的目标检测方法,和Faster RCNN等state of the art方法比起来,主打检测速度快.截止到目前为止(2017年2月初),YO ...
- Lane-Detection 近期车道线检测论文阅读总结
近期阅读的几篇关于车道线检测的论文总结. 1. 车道线检测任务需求分析 1.1 问题分析 针对车道线检测任务,需要明确的问题包括: (1)如何对车道线建模,即用什么方式来表示车道线. 从应用的角度来说 ...
- [论文阅读]阿里DIN深度兴趣网络之总体解读
[论文阅读]阿里DIN深度兴趣网络之总体解读 目录 [论文阅读]阿里DIN深度兴趣网络之总体解读 0x00 摘要 0x01 论文概要 1.1 概括 1.2 文章信息 1.3 核心观点 1.4 名词解释 ...
- [论文阅读]阿里DIEN深度兴趣进化网络之总体解读
[论文阅读]阿里DIEN深度兴趣进化网络之总体解读 目录 [论文阅读]阿里DIEN深度兴趣进化网络之总体解读 0x00 摘要 0x01论文概要 1.1 文章信息 1.2 基本观点 1.2.1 DIN的 ...
- [论文阅读] RNN 在阿里DIEN中的应用
[论文阅读] RNN 在阿里DIEN中的应用 0x00 摘要 本文基于阿里推荐DIEN代码,梳理了下RNN一些概念,以及TensorFlow中的部分源码.本博客旨在帮助小伙伴们详细了解每一步骤以及为什 ...
随机推荐
- 堆优化模拟退火(List-Based Simulated Annealing|LBSA)
申明 本文部分内容来自List-Based Simulated Annealing Algorithm for Traveling Salesman Problem[1] 如有侵权,请联系删除 引入 ...
- Ubuntu开启root账户登陆
Ubuntu开启root账户登陆 设置 root 密码:sudo passwd root sudo chmod 777 /usr/share/lightdm/lightdm.conf.d/50-xx ...
- 解决Host key verification failed.(亲测有效)
哈喽哇,今天在访问远程服务器的时候,出现了一个小问题. 原因:之前ssh联系过服务器,重置服务器后,再次连接服务器,就会出这个问题. 一.发现问题 问题如下图代码: $ ssh root@108.61 ...
- 解决:Failed to get D-Bus connection: Operation not permitted
docker中安装完httpd服务后,使用命令systemctl start httpd.service,发现报错,错误信息:Failed to get D-Bus connection: Opera ...
- 前端JavaScript开发风格规范
开发者需要建立和遵守的规范 大致可以划分成这几个方向: 开发流程规范 代码规范 git commit规范 项目文件结构规范 UI设计规范 1. 开发流程规范 这里可能有小伙伴有疑问了,开发流程规范不是 ...
- 远程控制软件 Teamviewer、Splashtop、向日葵哪个好用
编辑切换为居中 添加图片注释,不超过 140 字(可选) 好用的远程控制软件,我一般只推荐这三个经典品牌: Teamviewer.Splashtop.向日葵. Teamviewer 来自德国,妥妥 ...
- C语言:算法题判断是否有效字符({[]})---括号
给定一个只包括 '(',')','{','}','[',']'的字符串 s ,判断字符串是否有效. 有效字符串需满足: 左括号必须用相同类型的右括号闭合. ...
- Python基础篇(流程控制)
流程控制是程序运行的基础,流程控制决定了程序按照什么样的方式执行. 条件语句 条件语句一般用来判断给定的条件是否成立,根据结果来执行不同的代码,也就是说,有了条件语句,才可以根据不同的情况做不同的事, ...
- Python 将PowerPoint (PPT/PPTX) 转为HTML
PPT是传递信息.进行汇报和推广产品的重要工具.然而,有时我们需要将这些精心设计的PPT演示文稿发布到网络上,以便于更广泛的访问和分享.本文将介绍如何使用Python将PowerPoint文档转换为网 ...
- 京东面试:如何进行JVM调优?
JVM 调优是一个很大的话题,在回答"如何进行 JVM 调优?"之前,首先我们要回答一个更为关键的问题,那就是,我们为什么要进行 JVM 调优? 只有知道了为什么要进行 JVM 调 ...