PID控制動手玩玩看
PID控制動手玩玩看
PID三個參數到底該怎麼調才好,真的是一門藝術。
雖然在Marlin韌體內有提供自動測量的功能,但是測得的結果,不見得能令人滿意,還是需要調整。可是到底該怎麼調整?從哪個參數開始動手?數值該增加還是該減小?會不會調整了這個,又需要回頭調整上一個?整個調整過程實在是亂七八糟,不容易理出頭緒。在加上實驗需要時間,可是有一直找不出最佳參數,實在有夠累人。
今天我不曉得是哪根筋不對,突然想說可以用excel模擬PID溫度控制,這樣就可以很快得得到實驗結果,增加調整PID參數的經驗。雖然沒辦法直接透過模擬獲得擠出頭加熱需要的PID參數,但是至少可以熟悉調整PID參數對溫度控制的影響。
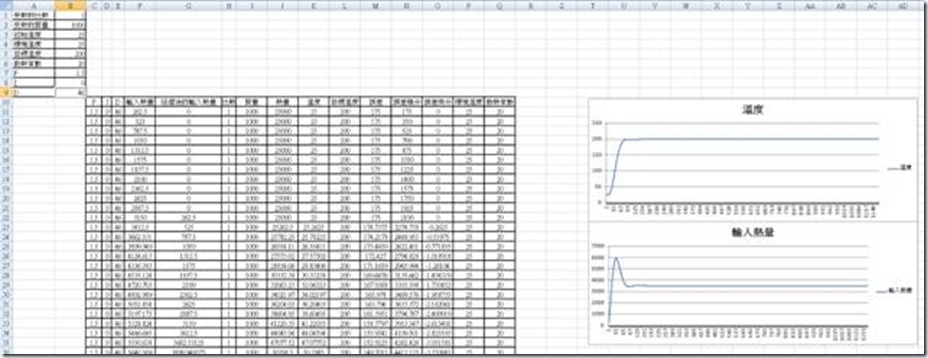
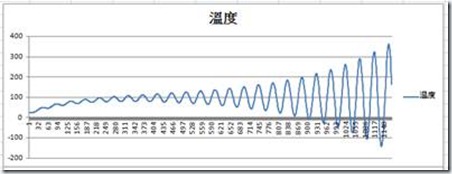
下載excel並且開啟後,可以看到左上角有可調整的參數,中間是模擬過程,右邊有兩個模擬結果的圖表。模擬參數分成兩組,前面幾項是環境變數,最後三項是PID值。
受熱物比熱:每公克的受熱物值,需要多少卡的熱量,能上升1℃。水的比熱為1(卡/公克-℃)
受熱物質量:(這不用解釋吧...)
初始溫度:(這不用解釋吧...)
環境溫度:(這不用解釋吧...)
目標溫度:(這不用解釋吧...)
散熱常數:跟受熱物散熱速度相關的常數。系統散失的熱量,我這邊用 (當下溫度 - 環境溫度 ) x 散熱常數來模擬計算。散熱常數越大,系統散失熱量的速度就越快;系統溫度跟環境溫度差異越大,散失熱量也越快。
PID:分別是比例控制常數、機分控制常數、微分控制常數。
系統熱量供應:這邊相對應於加熱棒輸出多少百分比的功率。這邊"系統熱量供應"的模擬計算公式如下:
"這次的"系統熱量供應 =
P x 這次取樣的溫度誤差 +
I x 從系統開始以來每次取樣的溫度誤差總和 +
D x (上次取樣的溫度誤差 - 這次取樣的溫度誤差)
P:比例控制常數。誤差值乘上P值,再加回系統熱量供應。
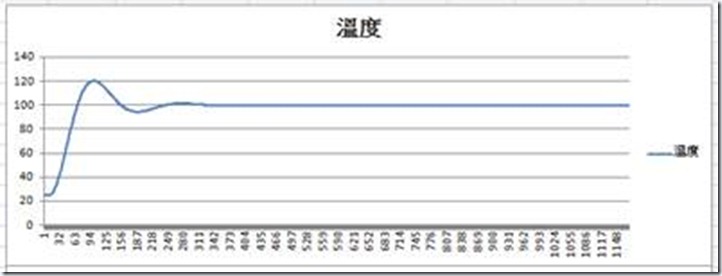
如果只有P,I跟D都設為零時,我覺得可以把他比喻成開車的時候,油門只會"直接"踩到某個定值,或是完全放掉。不會微調油門的力道。理論上只用比例控制,仍然可以讓溫度控制在目標溫度附近,但是震盪的狀況會比較嚴重。就像司機開車,總是猛踩油門,又猛踩剎車,車子會跑,速度也有,只是乘客會暈到死...


D:微分控制常數。溫度誤差對時間的曲線圖,是一個二維曲線。而對二維曲線微分的幾何意義,則是斜率。所以微分控制,實做上是取上一次採樣與這一次採樣的溫度誤差相減,再除以兩次採樣的時間間隔,算出斜率。用斜率乘上D,再加回系統熱量供應。
D值的效果,我會把他比喻成"提早減速"。當車子的速度接近司機想要維持的速度,速度還沒超過之前,有經驗的司機就會開始預先減小油門。不要等速度衝過頭再來踩剎車,減少車子加速減速的震盪,讓乘客舒適不暈車。不過該提早多少時間開始減速、該減多少速度不要減過頭或是減太少,就要靠D值的大小來調整了。

加入D "微分控制",可以讓系統較快穩定得達到目標溫度。
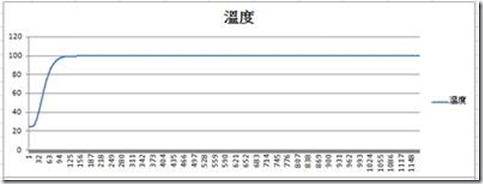

合適的D值,能讓溫度快速又穩定得恆定在目標溫度,而且沒有衝過頭的問題。

D值過大,提早剎車煞的力道多了,反而會讓系統不穩定得震盪。

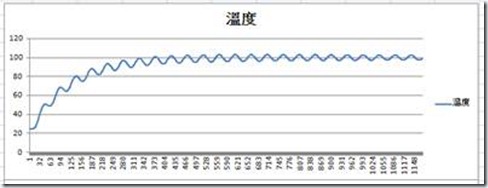
再繼續加大D值,甚至會讓控制結果發散不能收斂到目標溫度。
I:積分控制常數。積分在這邊的概念,是把過去所有的誤差加總起來。積分控制當然就是拿積分控制常數乘以過去所有誤差的加總,,再加回系統熱量供應。
積分控制多用來校正穩態誤差。當溫度穩定下來之後,溫度離目標溫度仍然有些微的誤差,這就是"穩態誤差"。如果為了穩態誤差而調整P值,整個系統的穩定度會大受影響。積分控制靠累積穩態誤差,讓這個誤差的效應因累積而放大,再乘以機分控制常數,就可以消彌穩態誤差。
以上是我對PID控制的一些想法。特別注意我介紹的時候,順序是PDI,用意就是建議大家調整的時候,可以先來回調整P、D這兩個常數(I歸零),覺得系統穩定、滿意了,再針對"穩態誤差"來調整 I 積分控制常數。
修改受熱物的質量、比熱,可以觀察受熱系統熱含對PID控制的影響。修改散熱常數,則可以觀察系統散熱情況(多加了風扇吹喉管),對系統穩定的影響。透過模擬實驗,多改幾組環境,並且調出相對應的PID值,應該可以更熟悉PID控制這門藝術~
參考資料
PID控制動手玩玩看的更多相关文章
- 手把手教你看懂并理解Arduino PID控制库——引子
介绍 本文主要依托于Brett Beauregard大神针对Arduino平台撰写的PID控制库Arduino PID Library及其对应的帮助博客Improving the Beginner’s ...
- 【iCore3应用开发平台】发布 iCore3 应用开发平台PID控制代码
说明:1.本代码包包含FPGA和STM32F407两部分内容2.FPGA工程为出厂代码FPGA工程,版本为REV43.STM32F407为只含PID控制的ARM工程4.在使用风扇过程中,请勿将手伸入扇 ...
- SLAM+语音机器人DIY系列:(四)差分底盘设计——5.底盘PID控制参数整定
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达.IMU.麦克风.音响.摄像头这些通用部件可以直接买到,很难买到通用的底盘.一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的:另一方面是因为 ...
- PID控制最通俗的解释与PID参数的整定方法
转自->这里 PID是比例.积分.微分的简称,PID控制的难点不是编程,而是控制器的参数整定.参数整定的关键是正确地理解各参数的物理意义,PID控制的原理可以用人对炉温的手动控制来理解.阅读本文 ...
- PID控制及整定算法
一.PID控制算法 PID是比例.积分.微分的简称,PID控制的难点不是编程,而是控制器的参数整定.参数整定的关键是正确地理解各参数的物理意义,PID 控制的原理可以用人对炉温的手动控制来理解.阅读本 ...
- 一文读懂PID控制算法(抛弃公式,从原理上真正理解PID控制)
PID控制应该算是应用非常广泛的控制算法了.小到控制一个元件的温度,大到控制无人机的飞行姿态和飞行速度等等,都可以使用PID控制.这里我们从原理上来理解PID控制. PID(proportion ...
- STM32—PID控制在直流电机中的应用
文章目录 一.PID控制算法 1.什么是PID 2.PID系数的理解 Ⅰ.比例(P)部分 Ⅱ.积分(I)部分 Ⅲ.微分(D)部分 3.PID的数字化处理 二.位置闭环控制 三.速度闭环控制 一.PID ...
- 专家PID控制仿真学习
目录 专家控制 专家系统 专家控制 学习笔记,用于记录学习 资料:<智能控制>(第四版)--刘金琨 专家系统 一.专家系统的定义 专家系统是一类包含知识和推理的智能计算机程序,其内部包含某 ...
- 两轮自平衡小车双闭环PID控制设计
两轮自平衡小车的研究意义 ...
随机推荐
- 微博登录报错 sso package orsign error
https://blog.csdn.net/gao_chun/article/details/41344725 (1)检查应用包名签名信息是否完善 如果你的应用只有一个包名.签名,请在 http:// ...
- 批处理DOS基础命令
批处理(Batch),也称为批处理脚本.顾名思义,批处理就是对某对象进行批量的处理.批处理文件的扩展名为bat. 批处理文件,或称为批处理程序,是由一条条的DOS命令组成的普通文本文件,可以用记事本直 ...
- 哨兵模式下,master选举关键点
哨兵模式下的选举策略: 1:slave priority越低 ,优先级越高 2:1同等情况下,slave复制的数据越多优先级越高 3:2相同的条件下run id越小越容易被选举
- linux strtock()函数使用问题
strtok()原型:char * strtok(char *s, const char *delim); 函数说明:strtok()用来将字符串分割成一个个片段.参数s 指向欲分割的字符串,参数de ...
- 什么是ELK
为什么用到ELK: 一般我们需要进行日志分析场景:直接在日志文件中 grep.awk 就可以获得自己想要的信息.但在规模较大的场景中,此方法效率低下,面临问题包括日志量太大如何归档.文本搜索太慢怎么办 ...
- Jenkins打包安卓时提示没同意constraintLayout的license的解决方法
使用Jenkins打包安卓项目时,报错并失败,错误信息: You have not accepted the license agreements of the following SDK compo ...
- padStart()方法,padEnd()方法
https://blog.csdn.net/ixygj197875/article/details/79090578
- ABP中针对sql2008的数据库配置
- python-类属性和对象属性(转)
class People(object): # 类属性是指定义在类的内部而且在方法的外部的属性 money = 10000 def __init__(self,name,age,gender=1): ...
- Ajax与跨域Ajax
Ajax 对于WEB应用程序:用户浏览器发送请求,服务器接收并处理请求,然后返回结果,往往返回就是字符串(HTML),浏览器将字符串(HTML)渲染并显示浏览器上.对于传统的Web应用,一个简单操作需 ...