使用Sophus练习李群SO3、SE3以及对应的李代数so3、se3
这是高博《视觉SLAM14讲,从理论到实践》第4章的练习。加了一些注释和理解:
#include <iostream>
#include <cmath>
using namespace std;
#include <Eigen/Core>
#include <Eigen/Geometry>
#include "sophus/so3.h"
#include "sophus/se3.h"
int main( int argc, char** argv )
{
// 沿Z轴转90度的“旋转矩阵”
Eigen::Matrix3d R = Eigen::AngleAxisd(M_PI/2, Eigen::Vector3d(0,0,1)).toRotationMatrix();
Sophus::SO3 SO3_R(R); // Sophus::SO(3)可以直接从“旋转矩阵”构造
Sophus::SO3 SO3_v( 0, 0, M_PI/2 ); // 亦可从“旋转向量”构造
Eigen::Quaterniond q(R); // 或者“四元数”
Sophus::SO3 SO3_q( q );
// 上述表达方式都是等价的
// 输出SO(3)时,以 "旋转向量(角+轴)" 形式输出
cout<<"SO(3) from matrix: "<<SO3_R<<endl;
cout<<"SO(3) from vector: "<<SO3_v<<endl;
cout<<"SO(3) from quaternion :"<<SO3_q<<endl;
Eigen::Vector3d so3 = SO3_R.log(); // 使用 "对数映射" 获得它的李代数
cout<<"so3 = "<<so3.transpose()<<endl;
cout<<"so3 hat=\n"<<Sophus::SO3::hat(so3)<<endl;// hat 为向量-------->矩阵
// 相对的,vee为反对称到向量
cout<<"so3 hat vee= "<<Sophus::SO3::vee( Sophus::SO3::hat(so3) ).transpose()<<endl; // transpose纯粹是为了输出美观一些
// 增量扰动模型的更新
Eigen::Vector3d update_so3(1e-4, 0, 0); //假设更新量为这么多
Sophus::SO3 SO3_updated = Sophus::SO3::exp(update_so3)*SO3_R;
cout<<"SO3 updated = "<<SO3_updated<<endl;
cout<<"*******************萌萌的分割线*****************************"<<endl;;
// 对SE(3)操作大同小异
Eigen::Vector3d t(1,0,0); // 沿X轴平移1-----------平移部分
Sophus::SE3 SE3_Rt(R, t); // 从R,t构造SE(3)-------旋转(旋转矩阵)+平移
Sophus::SE3 SE3_qt(q,t); // 从q,t构造SE(3)--------旋转 (四元数) +平移
cout<<"SE3 from R,t= "<<endl<<SE3_Rt<<endl;
cout<<"SE3 from q,t= "<<endl<<SE3_qt<<endl;
// 李代数se(3) 是一个六维向量,方便起见先typedef一下
typedef Eigen::Matrix<double,6,1> Vector6d; //6*1的double矩阵
Vector6d se3 = SE3_Rt.log(); // 使用 "对数映射" 获得它的李代数se3
cout<<"se3 = "<<se3.transpose()<<endl;
// 观察输出,会发现在Sophus中,se(3)的平移在前,旋转在后.
// 同样的,有hat和vee两个算符
cout<<"se3 hat = "<<endl<<Sophus::SE3::hat(se3)<<endl;
cout<<"se3 hat vee = "<<Sophus::SE3::vee( Sophus::SE3::hat(se3) ).transpose()<<endl;
// 最后,演示一下更新
Vector6d update_se3; //更新量
update_se3.setZero();
update_se3(0,0) = 1e-4d;
Sophus::SE3 SE3_updated = Sophus::SE3::exp(update_se3)*SE3_Rt;
cout<<"SE3 updated = "<<endl<<SE3_updated.matrix()<<endl;
return 0;
}
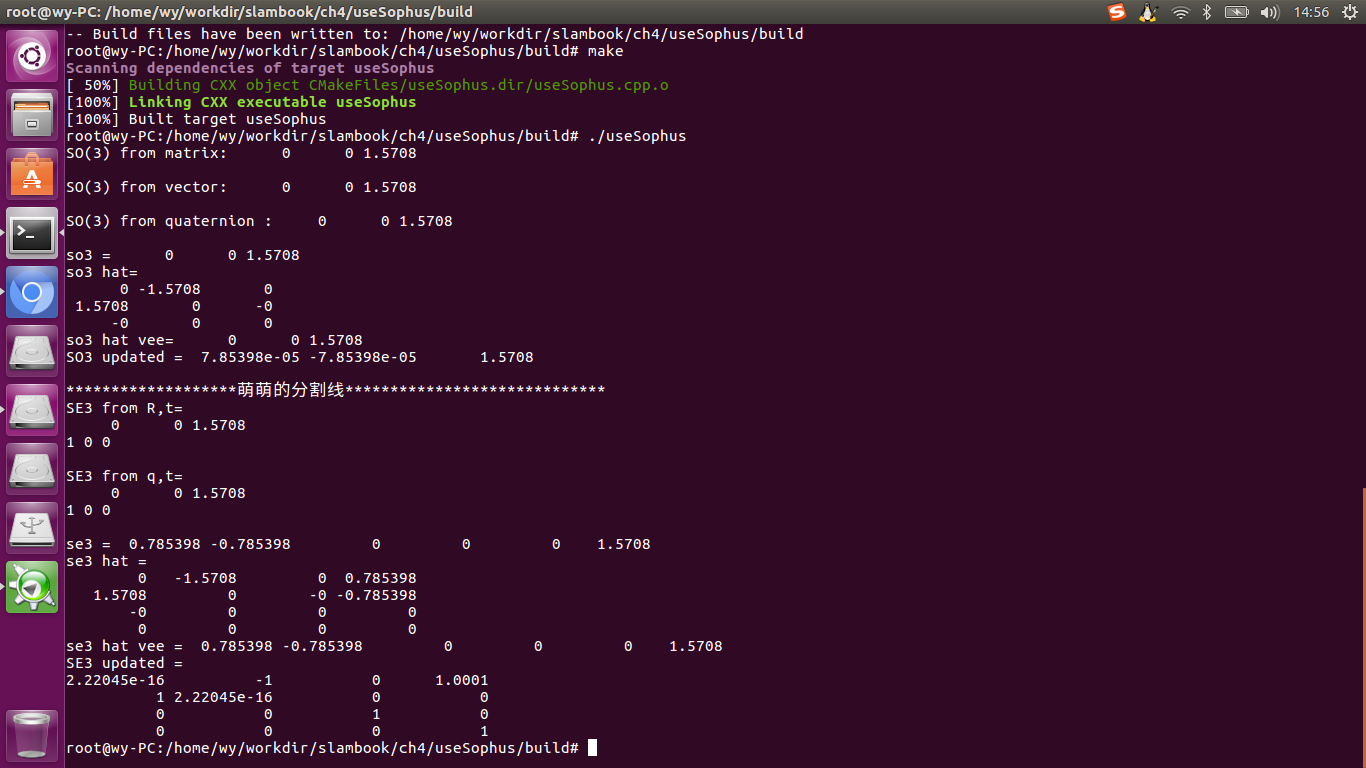
结果如下:
使用Sophus练习李群SO3、SE3以及对应的李代数so3、se3的更多相关文章
- 从零开始一起学习SLAM | 为啥需要李群与李代数?
很多刚刚接触SLAM的小伙伴在看到李群和李代数这部分的时候,都有点蒙蒙哒,感觉突然到了另外一个世界,很多都不自觉的跳过了,但是这里必须强调一点,这部分在后续SLAM的学习中其实是非常重要的基础,不信你 ...
- lsdslam代码笔记
0.1. question 0.2. 算法框架 0.3. 代码解析 0.3.1. 数据结构 0.3.1.1. Frame 0.3.1.2. FrameMemory 0.3.1.3. FramePose ...
- 【python之路11】集合数据类型(set)
集合数据类型(set):集合是不重复的无需序列 1.集合数据类型的创建 a = {11,22,33} #或 a = set() #创建空集合,不能用a={},这样创建的是字典类型 2.集合转换(将可迭 ...
- 音乐代码 (DNF天空之城、欢乐颂)。
太感人了 DNF天空之城 #include <cstdio> #include <windows.h> #define qdo 262 #define qre 294 #def ...
- python基础(一)—— 核心数据类型
Hello World程序 [root@mysql ~]# python3 Python 3.6.5 (default, Jul 8 2018, 11:41:23) [GCC 4.4.7 20120 ...
- Google Cardboard的九轴融合算法——基于李群的扩展卡尔曼滤波
Google Cardboard的九轴融合算法 --基于李群的扩展卡尔曼滤波 极品巧克力 前言 九轴融合算法是指通过融合IMU中的加速度计(三轴).陀螺仪(三轴).磁场计(三轴),来获取物体姿态的方法 ...
- Sophus链接错误
错误指示如下: CMakeFiles/run_vo.dir/run_vo.cpp.o: In function `main': run_vo.cpp:(.text.startup+0x1086): u ...
- Sophus libSophus.so
在编译包含Sophus的源文件的时候,出现如下错误 ../lib/libmyslam.so: undefined reference to `Sophus::SO3::SO3(double, doub ...
- Sophus库CMakeLists.txt内容详解笔记
CMakeLists.txt: SET(PROJECT_NAME Sophus) PROJECT(${PROJECT_NAME}) CMAKE_MINIMUM_REQUIRED(VERSION 2.6 ...
随机推荐
- dumpdecrypted进行砸壳
1.下载源码git clone git://github.com/stefanesser/dumpdecrypted/ 2.进行编译生成 dumpdecrypted.dylibmake 3.将dump ...
- MATLAB——matlab特殊符号表【转载】
链接来源: matlab特殊符号表 http://blog.sina.com.cn/s/blog_4a09187801014xg9.html Character Sequence Symbol Cha ...
- JLabel作为展现元素时需要注意的事项
如果没有内容,JLabel默认透明就无法作为点击区域了,所以为了让其可以响应鼠标事件需要设置 setOpaque(true) 这样就可以响应鼠标事件了 (吐槽一下,多年以前在大学做个web地图导航的网 ...
- 【HDU2037】今年暑假不AC
http://acm.hdu.edu.cn/showproblem.php?pid=2037 “今年暑假不AC?”“是的.”“那你干什么呢?”“看世界杯呀,笨蛋!”“@#$%^&*%...” ...
- javaSE基础(三)
泛型类:像ArrayList这样的特殊类,他们允许通过类型参数来指明使用的数据类型. 报装类:一种用于将基本类型的数据"封装"成对象的类. 装箱:将 基本类型的数据自动转换为对应类 ...
- nodejs常用命令
npm是一个node包管理和分发工具,已经成为了非官方的发布node模块(包)的标准.有了npm,可以很快的找到特定服务要使用的包,进行下载.安装以及管理已经安装的包. 1.npm install m ...
- J20170604-hm
丸める 四舍五入 文字化け 乱码 わきまえる 弁える 辨别,识相 御構い 张罗,招待,款待 お構いなしに 不加考虑 しおり ブックマーク 书签 スタイルシート 样式表
- [SDOI2011]消防(单调队列,树的直径,双指针)
消防 2011年 时间限制: 2 s 空间限制: 256000 KB 题目等级 : 大师 Master 题目描述 Description 某个国家有n个城市,这n个城市中任意两个都连通且有 ...
- knockout jquery警告删除
//触发删除的动作 $("a.delete").live('click', function () { var ...
- mysql的大数据量的查询
mysql的大数据量查询分页应该用where 条件进行分页,limit 100000,100,mysql先查询100100数据量,查询完以后,将 这些100000数据量屏蔽去掉,用100的量,但是如果 ...