创建ros的程序包--3
创建ros的程序包(原创博文,转载请标明出处--周学伟http://www.cnblogs.com/zxouxuewei/)
1.一个catkin程序包由什么组成?
一个程序包要想称为catkin程序包必须符合以下要求:
- 该程序包必须包含catkin compliant package.xml文件
- 这个package.xml文件提供有关程序包的元信息。
程序包必须包含一个catkin 版本的CMakeLists.txt文件,而Catkin metapackages中必须包含一个对CMakeList.txt文件的引用。
- 每个目录下只能有一个程序包。
- 这意味着在同一个目录下不能有嵌套的或者多个程序包存在。
最简单的程序包也许看起来就像这样:
my_package/
CMakeLists.txt
package.xml
2.在catkin工作空间中的程序包
开发catkin程序包的一个推荐方法是使用catkin工作空间,但是你也可以单独开发(standalone)catkin 软件包。一个简单的工作空间也许看起来像这样:
workspace_folder/ -- WORKSPACE
src/ -- SOURCE SPACE
CMakeLists.txt -- 'Toplevel' CMake file, provided by catkin
package_1/
CMakeLists.txt -- CMakeLists.txt file for package_1
package.xml -- Package manifest for package_1
...
package_n/
CMakeLists.txt -- CMakeLists.txt file for package_n
package.xml -- Package manifest for package_n
在继续本教程之前请先按照创建catkin工作空间教程创建一个空白的catkin工作空间。
3.创建一个catkin程序包
本部分教程将演示如何使用catkin_create_pkg命令来创建一个新的catkin程序包以及创建之后都能做些什么。
首先切换到之前通过创建catkin工作空间教程创建的catkin工作空间中的src目录下:
# You should have created this in the Creating a Workspace Tutorial
root@zxwubuntu-Aspire-V3-572G: cd ~/catkin_ws/src

现在使用catkin_create_pkg命令来创建一个名为'beginner_tutorials'的新程序包,这个程序包依赖于std_msgs、roscpp和rospy:
root@zxwubuntu-Aspire-V3-572G: catkin_create_pkg beginner_tutorials std_msgs rospy roscpp
这将会创建一个名为beginner_tutorials的文件夹,这个文件夹里面包含一个package.xml文件和一个CMakeLists.txt文件,这两个文件都已经自动包含了部分你在执行catkin_create_pkg命令 时提供的信息。

catkin_create_pkg命令会要求你输入package_name,如果有需要你还可以在后面添加一些需要依赖的其它程序包:
# This is an example, do not try to run this
# catkin_create_pkg <package_name> [depend1] [depend2] [depend3]
catkin_create_pkg命令也有更多的高级功能,这些功能在catkin/commands/catkin_create_pkg中有描述。
4.程序包依赖关系
4.1.一级依赖
之前在使用catkin_create_pkg命令时提供了几个程序包作为依赖包,现在我们可以使用rospack命令工具来查看一级依赖包。
Jan 9, 2013) There is a bug reported and already fixed in rospack in groovy, which takes sometime until the change gets reflected on your computer. If you see a similar issue like this with the next command, you can skip to the next command.
root@zxwubuntu-Aspire-V3-572G: rospack depends1 beginner_tutorials
就像你看到的,rospack列出了在运行catkin_create_pkg命令时作为参数的依赖包,这些依赖包随后保存在package.xml文件中。
root@zxwubuntu-Aspire-V3-572G: roscd beginner_tutorials
root@zxwubuntu-Aspire-V3-572G: cat package.xml

4.2.间接依赖
(Jan 9, 2013) There is a bug reported and already fixed in rospack in groovy, which takes sometime until the change gets reflected on your computer. If you see a similar issue like this with the next command, you can skip to the next command.
root@zxwubuntu-Aspire-V3-572G: rospack depends1 rospy
一个程序包还可以有好几个间接的依赖包,幸运的是使用rospack可以递归检测出所有的依赖包。
root@zxwubuntu-Aspire-V3-572G: rospack depends beginner_tutorials
cpp_common
rostime
roscpp_traits
roscpp_serialization
genmsg
genpy
message_runtime
rosconsole
std_msgs
rosgraph_msgs
xmlrpcpp
roscpp
rosgraph
catkin
rospack
roslib
rospy
5.自定义你的程序包
本部分教程将剖析catkin_create_pkg命令生成的每个文件并详细描述这些文件的组成部分以及如何自定义这些文件。
5.1.自定义 package.xml
自动生成的package.xml文件应该在你的新程序包中。现在让我们一起来看看新生成的package.xml文件以及每一个需要你注意的标签元素。
首先用vim编辑器打开package.xml
root@zxwubuntu-Aspire-V3-572G: vim package.xml
5.1.1.描述标签::

将描述信息修改为任何你喜欢的内容,但是按照约定第一句话应该简短一些,因为它覆盖了程序包的范围。如果用一句话难以描述完全那就需要换行了
5.1.2.维护者标签::

这是package.xml中要求填写的一个重要标签,因为它能够让其他人联系到程序包的相关人员。至少需要填写一个维护者名称,但如果有需要的话你可以添加多个。除了在标签里面填写维护者的名称 外,还应该在标签的email属性中填写邮箱地址:
5.1.3.许可标签::

你应该选择一种许可协议并将它填写到这里。一些常见的开源许可协议有BSD、MIT、Boost Software License、GPLv2、GPLv3、LGPLv2.1和LGPLv3。你可以在Open Source Initiative中阅读其中 的若干个许可协议的相关信息。对于本教程我们将使用BSD协议,因为ROS核心组件的剩余部分已经使用了该协议:
5.1.4.依赖项标签::
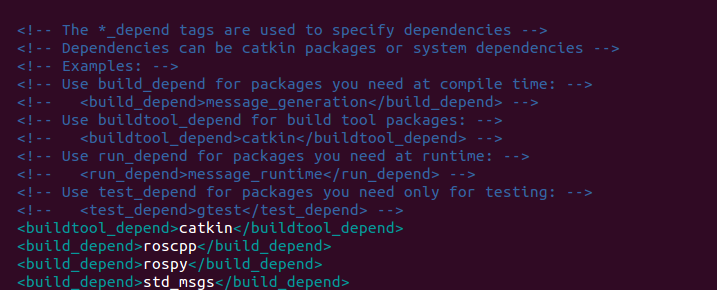
除了catkin中默认提供的buildtool_depend,所有我们列出的依赖包都已经被添加到build_depend标签中。在本例中,因为在编译和运行时我们需要用到所有指定的依赖包,因此还需要将每一个 依赖包分别添加到run_depend标签中:去掉注释和没有的依赖 后最终的文件内容::
<?xml version="1.0"?>
<package>
<name>beginner_tutorials</name>
<version>0.1.</version>
<description>The beginner_tutorials package</description> <maintainer email="you@yourdomain.tld">Your Name</maintainer>
<license>BSD</license>
<url type="website">http://wiki.ros.org/beginner_tutorials</url>
<author email="you@yourdomain.tld">Jane Doe</author> <buildtool_depend>catkin</buildtool_depend> <build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend> <run_depend>roscpp</run_depend>
<run_depend>rospy</run_depend>
<run_depend>std_msgs</run_depend> </package
5.2.自定义 CMakeLists.txt
到此,这个包含程序包元信息的package.xml文件已经按照需要完成了裁剪整理,现在你可以继续下面的教程了。catkin_create_pkg命令生成的CMakeLists.txt文件将在后续关于编译ROS程序代码的教程中讲述。
现在你已经创建了一个新的ROS程序包,接下来我们开始编译这个程序包
创建ros的程序包--3的更多相关文章
- ROS 笔记 程序包/节点/topic
官方教程: wiki.ros.org/cn/ROS/tutorials 程序包打创建于编译 创建程序包 在工作空间的src底下,输入如下命令: $ catkin_create_pkg 要创建的包名 依 ...
- 创建ROS工作空间和包
一.创建工作空间 mkdir -p ~/openni_ws/src cd ~/openni_ws catkin_make //在catkin工作空间(openni_ws)下catkin_ ...
- ROS工作空间和程序包创建
预备工作后面操作中我们将会用到ros-tutorials程序包,请先安装: $ sudo apt-get install ros-<distro>-ros-tutorials 将 < ...
- 用命令行工具创建 NuGet 程序包
NuGet.exe 下载地址 本文翻译自: https://docs.nuget.org/Create/Creating-and-Publishing-a-Package https://docs.n ...
- ROS学习笔记二(创建ROS软件包)
catkin软件包的组成 一个软件包必须满足如下条件才能被称之为catkin软件包: 必须包含一个catkin编译文件package.xml(manifests文件),此文件包含了描述该软件包的重要信 ...
- 创建.NET Core程序的Nuget Package
最近在看ASP.NET Core MVC的教材,几乎每章开始都要重复从Empty project开始创建一个ASP.NET Core的项目,然后手动修改project.json,增加经典三目录(Mod ...
- ROS wiki 学习(1)创建程序包时遇到的rosdep update出错
1. 使用turtlebot官网的ubuntu14.04走ROS维基时,在创建程序包后出现错误. 按照提示执行之后,出现以下错误. 搜寻度娘,几经波折后,终于解决.解决过程如下: 首先删除默认文件20 ...
- (四)创建ROS程序包(就是软件包)
你的 ROS 程序包都放到下面这个目录里, 切换到这个目录: $ cd ~/catkin_ws/src 使用下面的命令: 创建一个 ROS 程序包 名字就叫:beginner_tutorials $ ...
- Ros学习——创建程序包
1.程序包 一个程序包要想称为catkin程序包必须符合以下要求: 该程序包必须包含catkin compliant package.xml文件 这个package.xml文件提供有关程序包的元信 ...
随机推荐
- AI落地企业业务的一些问题
这两年大家都在喊未来已来,软件企业不管有没有算法工程师都竖起了AI的大旗,传统企业不管现在OA现状如何都想在数据转型.智能制造.机器智能方面尝尝鲜,感觉好像和前两年的互联网+风潮有点像,最近半年我在某 ...
- singer页面点击歌手singer是跳转到singer-detail的设置
1.创建components/singer-detail/singer-detail.vue 2.配置动态路由: { path: ':id', name:'singer-detail', compon ...
- Android几种layout(布局)的区别
1.FrameLayout:children按照从左上开始的顺序排列,主要用于tabed view或者图片切换功能:最简单的布局模型,在这种布局下每个添加的子控件都被放在布局的左上角,并覆盖在前一子控 ...
- 设置DatagridView的列头样式
设置DataGridView.ColumnHeaderDefaultCellStyle的BackColor属性会发现没有效果.这是因为在启动了可视样式的时候,BackColor和ForeColor的值 ...
- 分别通过【buildpath】和【lib】倒入JAR包有什么不同
我们可以通过java虚拟机的类加载器来理解.通过buildpath设置(或添加)程序使用jar包的classpath.Java虚拟机是根据Java ClassLoader(类加载器)决定如何,到那里去 ...
- iio adc转换应用编写
#include <stdio.h> #include <stdlib.h> #include <fcntl.h> # ...
- ramdisk文件系统制作
1. 确保内核支持ramdisk启动.2. 创建根文件系统(应用busybox或拷贝现有文件系统).3. 利用脚本mkroot.sh创建内核镜像:root.img.gz.4. uboot通过t ...
- 图片上传裁剪(asp.net)
图片在线裁剪功能 前台展现用jquery.Jcrop实现,后台使用 System.Drawing.Image类来进行裁剪 完整dome下载 http://download.csdn.net/detai ...
- iOS边练边学--UINavigationController导航条的使用
一.使用UINavigationController的步骤以及代码 // 程序加载完成后执行的代码 - (BOOL)application:(UIApplication *)application d ...
- Game publishing request was abnormally terminated (ID 27492).
本地可以正常发布:远程发布报错.怀疑跟直接删除数据库记录有关,wp_myarcadegames/wp_posts Game publishing request was abnormally term ...