《机器人SLAM导航核心技术与实战》第1季:第6章_机器人底盘
《机器人SLAM导航核心技术与实战》第1季:第6章_机器人底盘
视频讲解
第1季:第6章_机器人底盘
先 导 课
第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
答 疑 课
------(永 久 免 费 ● 系 列 课 程 ● 长 期 更 新)------

 编辑
编辑

编辑

编辑

编辑

编辑

编辑

编辑

编辑

编辑
6.1 底盘运动学模型
①两轮差速模型
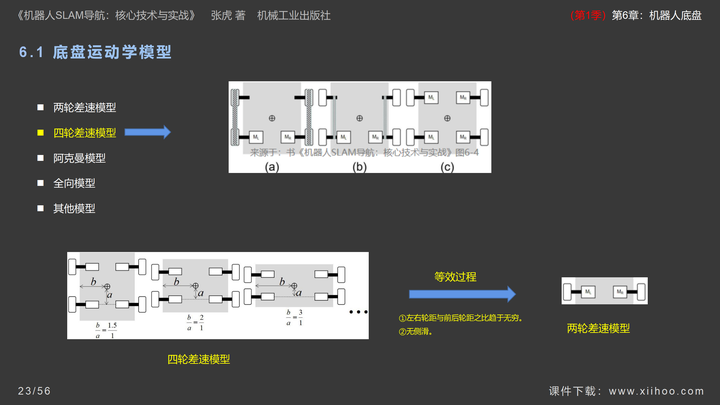
②四轮差速模型
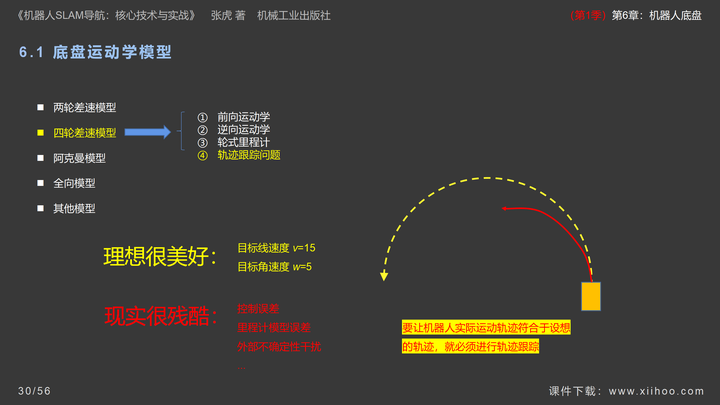
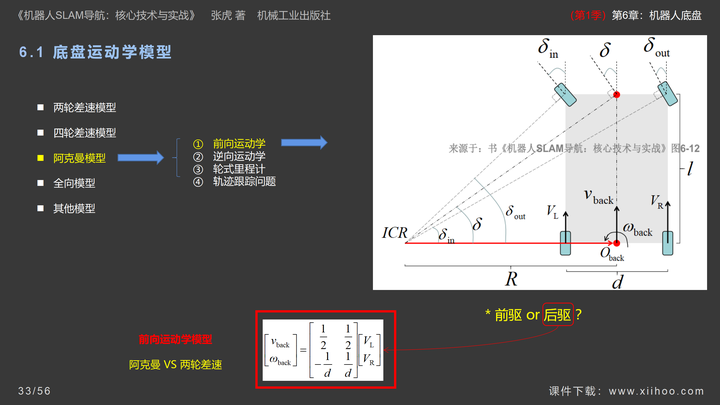
③阿克曼模型
④全向模型
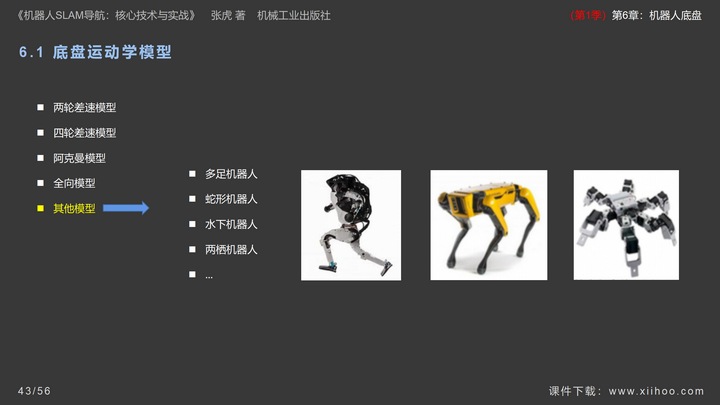
⑤其他模型

编辑

编辑

编辑

编辑

编辑

编辑

编辑

编辑

编辑

编辑

编辑

编辑

编辑
编辑

编辑

编辑

编辑

编辑

编辑

编辑
编辑

编辑

编辑
编辑

编辑

编辑

编辑

编辑

编辑

编辑

编辑

编辑

编辑
编辑
6.2 底盘性能指标
①载重能力
②动力性能
③控制精度
④里程计精度

编辑

编辑

编辑

编辑
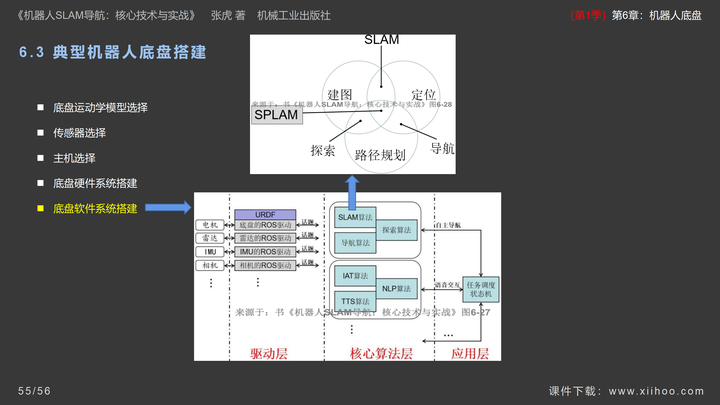
6.3 典型机器人底盘搭建
①底盘运动学模型选择
②传感器选择
③主机选择
④底盘硬件系统搭建
⑤底盘软件系统搭建

编辑

编辑

编辑

编辑

编辑
编辑
例程源码下载
Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
课件下载
PPT课件下载:
PDF课件下载:
《机器人SLAM导航核心技术与实战》第1季:第6章_机器人底盘的更多相关文章
- 《机器人SLAM导航核心技术与实战》第1季:第4章_机器人传感器
<机器人SLAM导航核心技术与实战>第1季:第4章_机器人传感器 视频讲解 [第1季]4.第4章_机器人传感器-视频讲解 [第1季]4.1.第4章_机器人传感器_惯性测量单元-视频讲解 [ ...
- RViz 实时观测机器人建立导航2D封闭空间地图过程 (SLAM) ----27
原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ ROS提供了非常强大的图形化模拟环境 RViz,这个 RViz 能做的事情非常多.今天我们学习一下如何使 ...
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- 除了ROS, 机器人定位导航还有其他方案吗?
利用ROS进行机器人开发,我想大多数企业是想借助ROS实现机器人的导航.定位与路径规划,它的出现大大降低了机器人领域的开发门槛,开发者无需向前人一样走众多弯路,掌握多种知识才能开始实现机器人设计的梦想 ...
- Elasticsearch核心技术与实战-学习笔记
学习资源: Elasticsearch中文社区日报https://elasticsearch.cn/article/ Elasticsearch 官网 https://www.elastic.co/ ...
- Kafka核心技术与实战,分布式的高性能消息引擎服务
Kafka是LinkedIn开发并开源的一套分布式的高性能消息引擎服务,是大数据时代数据管道技术的首选. 如今的Kafka集消息系统.存储系统和流式处理平台于一身,并作为连接着各种业务前台和数据后台的 ...
- Elasticsearch核心技术与实战,性能是真牛
Elasticsearch 是一款非常强大的开源搜索及分析引擎.结合 Kibana.Logstash和Beats,Elasticsearch 还被广泛运用在大数据近实时分析,包括日志分析.指标监控.信 ...
- ROS机器人SLAM创建地图
ROS机器人SLAM创建地图 连接小车 ssh clbrobot@clbrobot 激活树莓派 roslaunch clbrobot bringup.launch 开启雷达 打开另一个终端输入: ss ...
- .NET Core实战项目之CMS 第十三章 开发篇-在MVC项目结构介绍及应用第三方UI
作为后端开发的我来说,前端表示真心玩不转,你如果让我微调一个位置的样式的话还行,但是让我写一个很漂亮的后台的话,真心做不到,所以我一般会选择套用一些开源UI模板来进行系统UI的设计.那如何套用呢?今天 ...
- php CI 实战教程第一季百度经验杂志
phpCI实战教程第一季_百度经验杂志_百度经验http://jingyan.baidu.com/magazine/16428 杂志为本人php CI实战教程系列经验 从实际项目使用中写系列实战经验, ...
随机推荐
- ChatGPT+Mermaid自然语言流程图形化产出小试
ChatGPT+Mermaid语言实现技术概念可视化 本文旨在介绍如何使用ChatGPT和Mermaid语言生成流程图的技术.在现代软件开发中,流程图是一种重要的工具,用于可视化和呈现各种流程和结构. ...
- JavaScript判断两个数组相等的四类方法
在JavaScript中,数组本质上是一种特殊的对象,它的类型值会返回 object. 如果我们需要比较两个数组是否相等,不能像比较基本类型(String.Number.Boolean等)一样,使用 ...
- 每日一题 力扣 1377 https://leetcode.cn/problems/frog-position-after-t-seconds/
力扣 1377 https://leetcode.cn/problems/frog-position-after-t-seconds/ 这道题目用dp去做,构建邻接矩阵,做的时候需要注意题目条件,如果 ...
- 在VS Code 中调试远程服务器的PHP代码
背景 对于PHP的调试,一般来说我们用 echo 和 var_dump 就够用了. 有时会碰到要解决复杂的逻辑或需要确认代码的运行顺序,这里用var_dump效率就比较低了,这时建议用断点的方式进行代 ...
- ISP-AF相关-聚焦区域选择-清晰度评价
1.镜头相关 镜头类型 变焦类型: 定焦.手动变焦.自动变焦 光圈: 固定光圈.手动光圈.自动光圈 视场角: 鱼眼镜头.超广角镜头.广角镜头.标准镜头.长焦镜头.超长焦镜头(由大至小) 光圈: 超星光 ...
- 一键配置 Linux 环境:zsh + tmux + vim
默认使用root用户进行安装,整个流程优化过之后,如下 curl -sSL http://119.3.1.43/pub/sh/init-terminal.sh | bash -x # 安装完成之后,重 ...
- 2022-1-20 Wpf绑定属性
使用UpdateSourceTrigger绑定属性 后台绑定 通过后台代码绑定 UpdateSourceTrigger
- .net通用RSA加密工具类
目前最流行的加密算法莫过于RSA了,以下是我们.net/.net core C#生成环境用的RSA加密工具类,在此分享给大家. using System; using System.IO; using ...
- 写一段python下载商品图片的代码
以下是一个简单的Python代码示例,用于下载商品图片: import requests import os def download_image(url, save_path): response ...
- 第十六届全国大学生 信息安全竞赛创新实践能力赛wp
这是我第一次参加ctf,有许多东西都还不会,感觉有一些题挺有趣的,多积累积累经验吧. crypto Sign_in_passwd 下发了一个叫flag的文件,用记事本打开发现是两行加密,第一行看着像b ...