ROS基础-基本概念和简单工具(1)
1、什么是ROS?
Robot operating System ,简单说机器人操作系统,弱耦合的分布式进程框架,通过进程间的消息传递和管理。实现硬件抽象和设备控制。
2、节点(node)
- node 是ROS的核心实体。
- 一段ROS程序
- 使用ROS的中间件进行通信
- 节点之间可以独立的启动和停止
3、和节点相关的概念
- message
- topic
- roscore :
- 有且只有一个roscore 可以运行
- 必须首先启动roscore
- 负责调度通信
- 发布器节点和roscore通信(如初始化一个topic)
- publisher、subscriber
4、工具
catkin_create_pkg: 创建一个package
catkin_make: 编译ROS程序
rosrun: 运行ros程序
rostopic: 主题有关的命令
rostopic list ; rostopic hz topic1; rostopic bw topic1; rostopic info topic1; rostopic echo topic1
rosnode list : 产看运行的节点列表
roslaunch : 通过编辑.launch 的文件自动启动多个节点
rosbag : 对话题数据的记录和回放
rosbag record topic1
rosbag play name1.bag
rqt_plot: 对结果的可视化
5、常用工具详细介绍
catkin_create_pkg:
catkin_create_pkg [packageNmae] [依赖项]

依赖项: roscpp: 使用c++编译器,兼容c++接口; std_msgs: ros预定义的数据类型

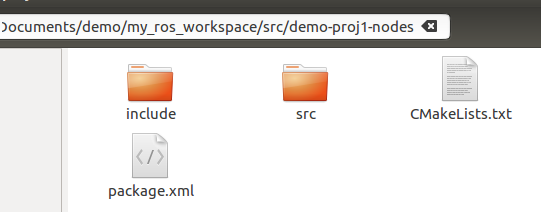
catkin_make:
package.xml : 组织ROS程序包,命名程序包名称、依赖项
<name></name>
<build_depend></build_depend>
<run_depend></run_depend>

CMakeLists.txt : 一个简单示例如下
cmake_minimum_required(VERSION 2.8.3)
project(demo-proj1-nodes) # package name find_package(catkin REQUIRED COMPONENTS
roscpp
std_msgs
) catkin_package(
# INCLUDE_DIRS include
# LIBRARIES my_minimal_nodes
# CATKIN_DEPENDS roscpp std-msgs
# DEPENDS system_lib
) include_directories(
include ${catkin_INCLUDE_DIRS}
) add_executable(my_minimal_publisher src/minimal_publisher.cpp)
add_executable(my_minimal_publisher2 src/sleep_minimal_publisher.cpp) target_link_libraries(my_minimal_publisher
${catkin_LIBRARIES}
)
target_link_libraries(my_minimal_publisher2
${catkin_LIBRARIES}
)
编译命令:catkin_make
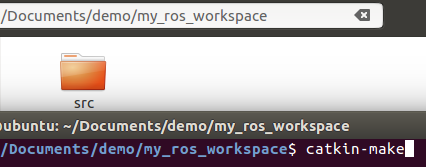

编译后会有,devel 和build 两个文件夹
rosrun:
首先使用添加环境变量: source ./devel/setup.bash
rosrun [package-name] [可运行程序名称]
rqt_graph:
图形展示拓扑图。

roslaunch:
批量启动节点,需要编写 .launch的启动文件, 简单示例如下:
在package 目录下,创建 launch 目录,并在其中创建 .launch 文件:
<launch>
<node name="publisher" pkg="my_minimal_nodes" type="my_minimal_publisher2"/>
<node name="subscriber" pkg="my_minimal_nodes" type="my_minimal_psubscriber"/>
</launch>
运行命令: roslaunch [package name] [.launch]
catkin_simple:
简化和规范 CMakeLists.txt
https://github.com/wsnewman/learning_ros_external_packages

打开~/.bashrc 在末尾添加,alias cs_create_pkg='~/path/cs_create_pkg.py'
之后可以使用命令: cs_create_pkg [package name] [依赖] 创建ros包
将catkin_simple 复制到你的程序包同级的目录中,如下,之后可以使用 catkin_make 编译。
catkin_simple 也可以从该地址中获得,一些详细使用方法也在其中https://github.com/catkin/catkin_simple
ROS基础-基本概念和简单工具(1)的更多相关文章
- java基础之JDBC三:简单工具类的提取及应用
简单工具类: public class JDBCSimpleUtils { /** * 私有构造方法 */ private JDBCSimpleUtils() { } /** * 驱动 */ publ ...
- ROS_Kinetic_20 ROS基础补充
ROS_Kinetic_20 ROS基础补充 1 手动创建ROS功能包 参考官网:http://wiki.ros.org/cn/ROS/Tutorials/Creating%20a%20Package ...
- ROS_Kinetic_09 ROS基础内容(四)
ROS_Kinetic_09 ROS基础内容(四) 参考网址: http://wiki.ros.org/cn/ROS/Tutorials/UsingRosEd http://wiki.ros.org/ ...
- ROS_Kinetic_05 ROS基础内容(二)
ROS_Kinetic_05 ROS基础内容(二) 1. ROS节点node 官网教程:http://wiki.ros.org/cn/ROS/Tutorials/UnderstandingNodes ...
- ROS_Kinetic_04 ROS基础内容(一)
ROS_Kinetic_04 ROS基础内容(一) 在开始基础内容之前,假定您已经完成了ROS kinetic版本的安装, 如果没有请参考ROS kinetic安装说明. 1. 环境变量 在使用ROS ...
- Linux磁盘概念及其管理工具fdisk
Linux磁盘概念及其管理工具fdisk [日期:2016-08-27] 来源:Linux社区 作者:chawan [字体:大 中 小] 引言:冯诺依曼体系中的数据存储器就是我们常说的磁盘或硬盘 ...
- 超简单工具puer——“低碳”的前后端分离开发
本文由作者郑海波授权网易云社区发布. 前几天,跟一同事(MIHTool作者)讨教了一下开发调试工具.其实个人觉得相较于定制一个类似MIHTool的Hybrid App容器,基于长连的B/S架构的工具其 ...
- DotNetty关键概念及简单示例(基于NET5)
DotNetty关键概念及简单示例(基于NET5) 目录 DotNetty关键概念及简单示例(基于NET5) 1.DotNetty 设计的关键 1.1 核心组件 1.1.1 Channel 1.1.2 ...
- Bootstrap<基础十> 响应式实用工具
Bootstrap 提供了一些辅助类,以便更快地实现对移动设备友好的开发.这些可以通过媒体查询结合大型.小型和中型设备,实现内容对设备的显示和隐藏. 需要谨慎使用这些工具,避免在同一个站点创建完全不同 ...
随机推荐
- Spring、SpringMVC、SpringBoot、SpringCloud的区别与联系
前言 Spring是一个轻量级的控制反转(IoC)和面向切面(AOP)的容器框架.Spring使你能够编写更干净.更可管理.并且更易于测试的代码. Spring MVC是Spring的一个模块,一个w ...
- python爬虫--数据解析
数据解析 什么是数据解析及作用 概念:就是将一组数据中的局部数据进行提取 作用:来实现聚焦爬虫 数据解析的通用原理 标签定位 取文本或者属性 正则解析 正则回顾 单字符: . : 除换行以外所有字符 ...
- 在Linux系统下制作系统启动盘(Ubuntu Linux)
在Linux系统下制作系统启动盘有两种方法: 1.用dd命令 2.用Linux自带的图形界面工具 Startup Disk Creator 本教程使用第2种方式,用Linux自带的图形界面工具制作系统 ...
- webpack实践(三)- html-webpack-plugin
webpack系列博客中代码均在github上:https://github.com/JEmbrace/webpack-practice <webpack实践(一)- 先入个门> < ...
- ASP.NET+d3.js实现Sqlserver数据库的可视化展示
效果: 数据库端: 前端展示: 实现原理: 1.在数据段建立两个存储过程 queryUserAnsawer(id) 根据用户ID返回每一题的得分,主要是bcp exe时不能直接在sqlserver中执 ...
- 管网平差的python程序
在市政给水管网当中,管网平差的目的是在已知节点流量.管段长度的情况下,求得各管段流量和对应的经济管径.本科生学习阶段了解并掌握管网平差原理及方法是必不可少的环节. 在下面的程序当中,将利用哈代克罗斯法 ...
- asp.net core 系列 9 三种运行环境和IIS发布
一.在asp.net core中使用多个环境 ASP.NET Core 配置是基于运行时环境, 使用环境变量.ASP.NET Core 在应用启动时读取环境变量ASPNETCORE_ENVIRONME ...
- Python中的四种交换数值的方法
交换两个变量的值方法,这个面试题如果只写一种当然很简单,没什么可以说的. 今天这个面试是问大家有几种办法来实现交换两个变量的值. 在没开始看具体答案前,你可以先想想看 下面分别来说说这几种方法 方法一 ...
- 编译Netty源码遇到的一些问题-缺少io.netty.util.collection包
缺少包和java类 下载好Netty的源码后,导入到IDE,运行自带的example时编译不通过. 如下图,是因为io.netty.util.collection的包没有 点进去看,确实没有这个包 发 ...
- python高阶函数—filter
python内置了一个filter函数,用于过滤序列.和map函数类似,filter()函数也接受一个函数和一个序列.只不过filter函数中是把函数依次作用于序列中的每一个元素,如果是True则保留 ...