数学基础-3D空间的位置表示
转自:http://www.cnblogs.com/gaoxiang12/p/5113334.html

刚体运动
本篇讨论一个很基础的问题:如何描述机器人的位姿。这也是SLAM研究的一个很基本的问题。这里的位姿表示了位置和姿态。描述位置很简单,如果机器人在平面内运动,那么用两个坐标来描述它的位置:

如果在三维空间中运动,则它的位置就用三个空间坐标来表示:

对于姿态来说,在2D情况下还需要增加一个旋转角θ;在3D情况下表达的方式就有多种,常见的如欧拉角、四元素、旋转矩阵等。那么有了位置和姿态,就可以描述一个坐标系;进一步,还能描述坐标系之间的转换关系。常见的问题如:机器人视野中某个点,对世界坐标系的(或地图的)哪个点?这时,就需要先得到该点针对机器人坐标系坐标值,再根据机器人位姿转换到世界坐标系中。
齐次坐标系
在位姿转换中,通常采用射影空间的齐次坐标表示。齐次坐标是什么呢?记n维射影空间为 其中一个空间点的坐标为普通的3D坐标加一个齐次分量:
其中一个空间点的坐标为普通的3D坐标加一个齐次分量:

例如,在2维和3维射影空间中的点,分别表示为:

用四个数来表示点,说明点和坐标肯定不是一一对应的。没错,在齐次坐标中,某个点x的分量同乘一个非零常数k后,仍然表示的是同一个点。因此,一个点的具体坐标值不是唯一的。如 但是在w不等于0,可以对每一个坐标除以最后一项w,强制最后一项为1,从而得到一个点唯一的坐标表示:
但是在w不等于0,可以对每一个坐标除以最后一项w,强制最后一项为1,从而得到一个点唯一的坐标表示:

那么为什么要使用齐次坐标来表示呢?原因如下:
1)齐次坐标下点和直线(高维空间里为超平面)能够使用同样的表达。


把点和超平面采用同样的表示,这种做法一个非常直接的好处,是射影几何里的“对偶原理”。该原理是说,任何有关“点”与“平面”的命题,都可以交换“点”与“平面”的概念,得到一个对偶的命题。对偶命题和原命题是一样的。通过“对偶原理”,射影几何的数学家就可以偷懒,只需要证一半定理,因为对偶命题和原命题有同样的涵义。例如,我们证明了 中某条件下三点共线,那么替换概念后的三线共点则自然成立。
中某条件下三点共线,那么替换概念后的三线共点则自然成立。
2)齐次坐标能囊括无穷远点与无穷远超平面

θθ3)齐次坐标可以方便地将平移与旋转放在一个矩阵中
有关坐标系怎么用齐次坐标进行变换,后文会详细解释。现在我们能表达点了,还剩下一个姿态。由于2D与3D差别较大,我们分而述之。
2D姿态的描述




3D变换
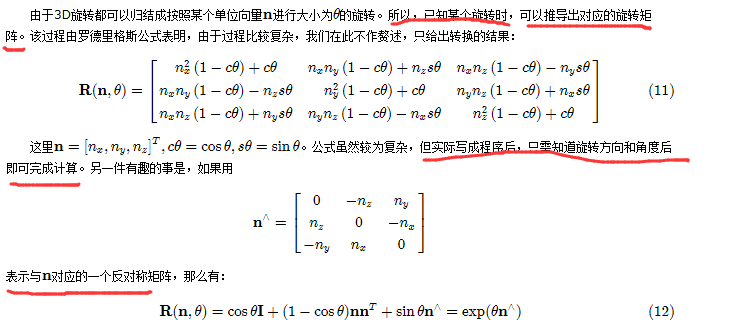
3D的旋转可以由旋转矩阵、欧拉角、四元素等若干种方式描述,它 们也统称为三维旋转群SO(3);而3D的变换即旋转加上位移,是SE(3)。为了和2D变换统一起见,我们首先介绍旋转矩阵表示法。
旋转矩阵描述



数学基础-3D空间的位置表示的更多相关文章
- 视觉SLAM的数学基础 第一篇 3D空间的位置表示
视觉SLAM中的数学基础 第一篇 3D空间的位置表示 前言 转眼间一个学期又将过去,距离我上次写<一起做RGBD SLAM>已经半年之久.<一起做>系列反响很不错,主要由于它为 ...
- Direct3D 11 Tutorial 4: 3D Spaces_Direct3D 11 教程4:3D空间
概述 在上一个教程中,我们在应用程序窗口的中心成功渲染了一个三角形. 我们没有太注意我们在顶点缓冲区中拾取的顶点位置. 在本教程中,我们将深入研究3D位置和转换的细节. 本教程的结果将是渲染到屏幕的3 ...
- WebGL和ThreeJs学习6--射线法确定3D空间中所选物体
一.在 threejs 中如何确定下图3D空间中鼠标点击位置的 object 对象? 二.射线法确定步骤及代码 //Three.js提供一个射线类Raycaster来拾取场景里面的物体.更方便的使用鼠 ...
- OpenGL学习进程(9)在3D空间的绘制实例
本节将演示在3D空间中绘制图形的几个简单实例: (1)在3D空间内绘制圆锥体: #include <GL/glut.h> #include <math.h> # ...
- NeHe OpenGL教程 第五课:3D空间
转自[翻译]NeHe OpenGL 教程 前言 声明,此 NeHe OpenGL教程系列文章由51博客yarin翻译(2010-08-19),本博客为转载并稍加整理与修改.对NeHe的OpenGL管线 ...
- 第05课 OpenGL 3D空间
3D空间: 我们使用多边形和四边形创建3D物体,在这一课里,我们把三角形变为立体的金子塔形状,把四边形变为立方体. 在上节课的内容上作些扩展,我们现在开始生成真正的3D对象,而不是象前两节课中那样3D ...
- 仿QQ空间根据位置弹出PopupWindow显示更多操作效果
我们打开QQ空间的时候有个箭头按钮点击之后弹出PopupWindow会根据位置的变化显示在箭头的上方还是下方,比普通的PopupWindow弹在屏幕中间显示好看的多. 先看QQ空间效果图: ...
- Oracle转移数据表空间存储位置
问题描述:Oracle表空间创建到了C盘,发现C盘的空间不够,现在将表空间的文件转移到D盘下. 操作方法: 1. 先登录sqlplus,登录用户.在cmd中输入:sqlplus /nologSQL&g ...
- 3D空间包围球(Bounding Sphere)的求法
引言 在3D碰撞检測中,为了加快碰撞检測的效率,降低不必要的碰撞检測,会使用基本几何体作为物体的包围体(Bounding Volume, BV)进行測试.基本包围体的碰撞检測相对来说廉价也easy的多 ...
随机推荐
- 2018.7.30 Designing a Qi-compliant receiver coil for wireless power systems
1) 找资料: http://www.mouser.cn/datasheet/2/389/stwlc33-1156583.pdf https://training.ti.com/wireless-po ...
- CI框架后台添加左侧导航栏出现的一系列问题
- [独孤九剑]Oracle知识点梳理(六)数据库常用对象之Procedure、function、Sequence
本系列链接导航: [独孤九剑]Oracle知识点梳理(一)表空间.用户 [独孤九剑]Oracle知识点梳理(二)数据库的连接 [独孤九剑]Oracle知识点梳理(三)导入.导出 [独孤九剑]Oracl ...
- Codeforces 802 ABC. Heidi and Library
题目大意 你需要保证第\(i\)天时有第\(a_i\)种书.你可以在任何一天买书,买第\(i\)种书的代价为\(c_i\). 你最多同时拥有\(k\)本书,如果此时再买书,则必须先扔掉已拥有的一本书. ...
- nginx 400
做服务器nginx配置的时候有出现过 400 Bad Request 服务器无法理解请求的格式,客户端不应当尝试再次使用相同的内容发起请求.
- Xml日志记录文件最优方案(附源代码)
Xml作为数据存储的一种方式,当数据非常大的时候,我们将碰到很多Xml处理的问题.通常,我们对Xml文件进行编辑的最直接的方式是将xml文件加载到XmlDocument,在内存中来对XmlDocume ...
- 玩转C链表
链表是C语言编程中常用的数据结构,比如我们要建一个整数链表,一般可能这么定义: 1 2 3 4 struct int_node { int val; struct in ...
- 在Mac系统下使用自己安装的PHP
今天在安装单元测试框架PHPUnit,需要PHP的最低版本是5.6,由于我的MacBook自带的PHP版本是5.5.36,不能满足安装条件. 看了一下这个网址:https://php-osx.liip ...
- 正值表达式匹配html标签的属性值
今天由于工作的需求,需要获取html标签的属性值,立即想到了正则表达式,标签如下: <circle id="ap_test" cx="200" cy=&q ...
- [转载]嵌入式linux下操作GPIO
本文转自:http://blog.csdn.net/mirkerson/article/details/8464231 在嵌入式设备中对GPIO的操作是最基本的操作.一般的做法是写一个单独驱动程序,网 ...